
PID控制在潜艇垂直运动中的应用
2021-01-20 06:21杨智玲厦门海洋职业技术学院
数码世界 2020年12期
杨智玲 厦门海洋职业技术学院
1 引言
我国是一个海洋大国,从古至今,人们从未停止过探索海洋的脚步。习近平总书记在十八大上提出了“海洋强国”战略,为了维护领海的完整与安全,建设强大的现代化海军已成为当代中国国防迫切需要实现的目标。潜艇作为能够在水下运行的大型机械,因其种类多样,形状各异,能长时间作业等特点引起了世界各国专家学者们的热切关注。自二十世纪以来,许多军事大国在建设海军的时候都不约而同把潜艇作为重要的建设对象。潜艇的应用非常广泛,在军事上可以作为攻击主力,既可充当防御也可以突破敌方封锁。潜艇也被用于非军事用途上,如在海洋科研、考古探险、勘探开采、搜索援救、观光旅游等活动中都可以看到潜艇的身影。
对潜艇进行动力学建模是设计控制策略的基础。潜艇通常是做六自由度的空间运动,由于其结构复杂和容易受到海浪和洋流等各种外界因素的影响,获得的动力学方程往往不够精确,且非线性严重、耦合程度高,研究难度大。因此在现实处理中,一般需要把潜艇水下操纵运动分为水平面运动和垂直面运动来进行控制系统设计,这种方法称为分平面设计。此外,由于潜艇动力学模型的运动方程非线性程度高,在对潜艇操纵运动进行研究时可以对潜艇的实际模型进行线性化处理。PID控制算法是最早发展起来的经典控制算法。该算法于20世纪30、40年代提出,由于简单易懂,在实际工程控制中得到广泛应用。采用PID算法的控制过程中,可以通过调节三个控制参数来实现控制目标。对于典型的“一阶/二阶滞后+纯滞后”的控制系统来说,PID控制算法是最优的控制算法之一。PID控制算法的主要优势在于参数整定简便灵活,三个控制参数可以根据控制需要随意组合。本文采用比例微分(PD)调节控制算法设计控制器对潜艇垂直运动的线性模型进行控制,并进行仿真验证。
2 潜艇模型
本文采用以下潜艇线性模型:

3 PID控制器设计
3.1 控制目标及要求
3.2 控制器设计
在整个潜伏过程中,艉舵、围壳舵同时控制纵倾角:
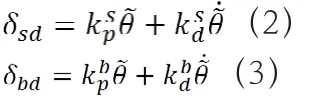
最终,通过对纵倾角的控制实现深度的控制。
4 系统仿真及性能仿真
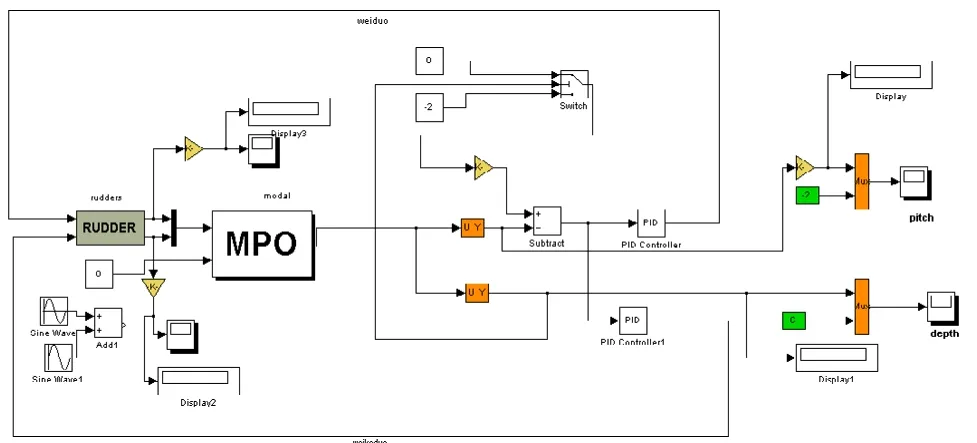
图1 PID仿真结构图
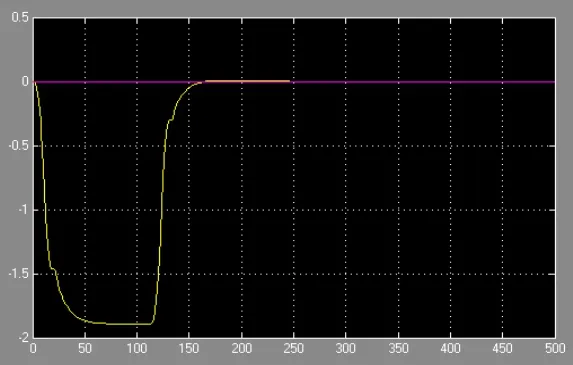
图2 曲线(X轴为T/S,Y轴为 /°)
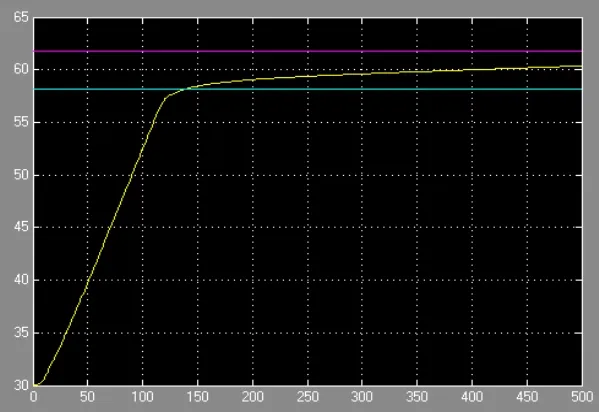
图3 h曲线(X轴为T/s,Y轴为 /m)
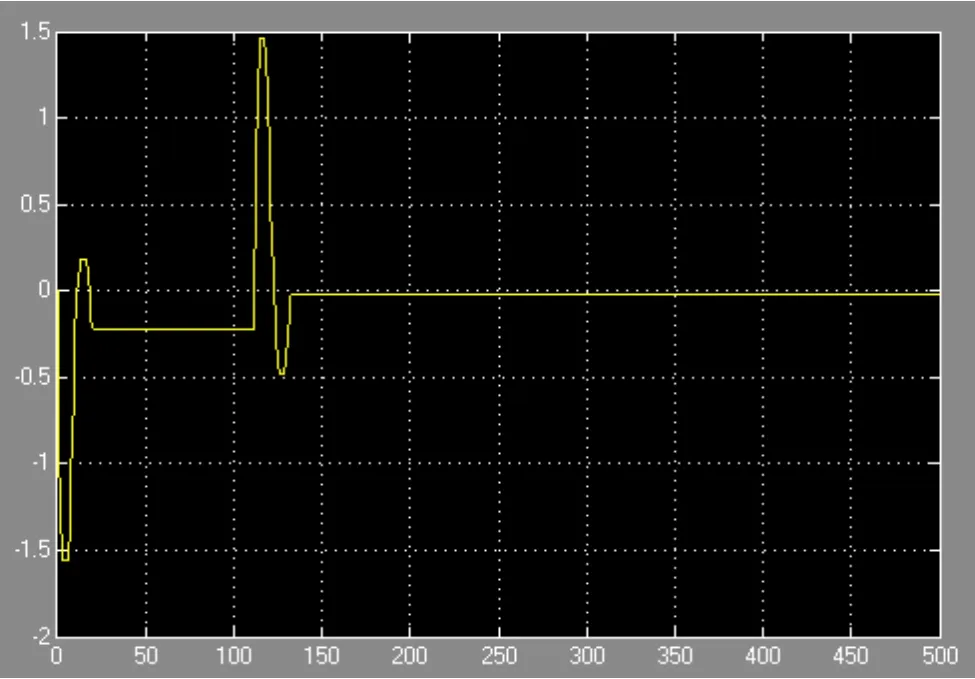
图4 曲线(X轴为T/S,Y轴为/°)
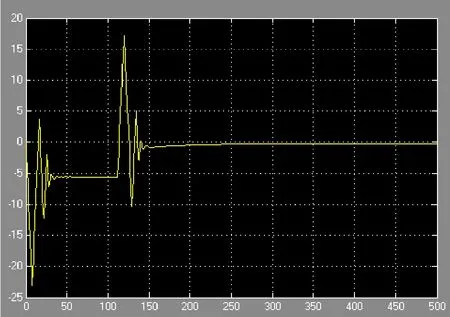
图5 曲线(X轴为T/S,Y轴为/°)
图1是利用MATLAB平台进行仿真验证的结构图。从图2纵倾角曲线可以看出,在到达转换深度之前,纵倾角能够稳定在,到达转换深度之后,最终能够回到。从图3深度时间响应曲线可以看出,经过140s,深度进入误差允许范围。从图4艉舵舵角和图5围壳舵舵角的时间响应曲线可以看出,艉舵在整个控制过程中只需打两次舵,频率很低;围壳舵也只有在0s到40s,和112s到150s之间舵角变化打舵稍显频繁。
5 结论
本文采用PD控制算法研究了潜艇垂直面运动,从仿真结果可以看出,纵倾角控制效果较好,但深度控制虽然达到了控制目标却不够理想。首先,这是由于本研究只采用比例微分PD控制,而没有引入积分项I,对纵倾角无法实现无差控制,下潜深度不能一直保持在理想深度上,造成最终深度会有缓慢的变化。其次,研究过程中发现,在控制潜艇垂直面运动时,如果控制器设计中加入深度误差信号,单纯对比例微分PD参数进行调试是达不到理想的控制效果。若按照常用的垂直面运动PD控制方法:相比较用围壳舵控制下潜深度和艉舵控制纵倾角,虽然采用围壳舵控制纵倾角效果会更好,但是由于无法通过引入深度误差信号直接控制深度,因此深度的控制效果还是不够好。接下来将会重点研究在围壳舵和艉舵共同作用下,纵倾角和下潜深度都能达到理想的控制效果。
猜你喜欢
选煤技术(2022年2期)2022-06-06
北京汽车(2021年3期)2021-07-17
湖北工业大学学报(2021年2期)2021-04-28
科学大众·小诺贝尔(2021年10期)2021-01-22
电子制作(2019年9期)2019-05-30
家庭科学·新健康(2018年10期)2018-12-15
汽车文摘(2016年11期)2016-12-08
汽车文摘(2016年11期)2016-12-08
山东工业技术(2016年15期)2016-12-01
科技与创新(2016年17期)2016-11-04
