
复合行星齿轮的非线性动态特性分析
2021-01-20 12:02张国平
甘肃科技纵横 2021年9期
张国平


摘 要:针对复合行星齿轮,忽略系统的横向以及纵向位移,只考虑扭转自由度,建立了系统4自由度运动微分方程,综合考虑齿侧间隙、时变啮合刚度、综合传动误差等非线性因素,通过c语言编程四阶变步长龙格库塔法(Runge-Kutta),应用数值仿真的方法:即根据实际工况,给微分方程中的变量赋予真实数据,从而获取系统的非线性响应,然后利用相图、分岔图、庞加莱截面图分析了系统运动情况。分析结果表明:系统在[0.1,1.55]和[2.4,3]区间内系统有良好的稳定性,为比较理想的运动区间。
关键词:齿轮传动;分岔;周期运动
:
0 引言
行星齿轮组是一种应用广泛的机构,输出转矩大、结构紧凑等优点使其在风电、汽车、航空航天等关键领域得到广泛应用。Kahraman A通过公式推导,研究了线性纯扭转模型的特性。Litak等人的研究,创新之处就是考虑轴的刚度。盛冬平将各种非线性因素用控制变量思想,分别研究了它们对系统的影响。王三民等将齿面摩擦和其它非线性因素结合,通过比较不同参数的庞加莱图,发现了摩擦使系统提前进入混沌。
1 复合行星齿轮传动系统的动力学模型及其方程
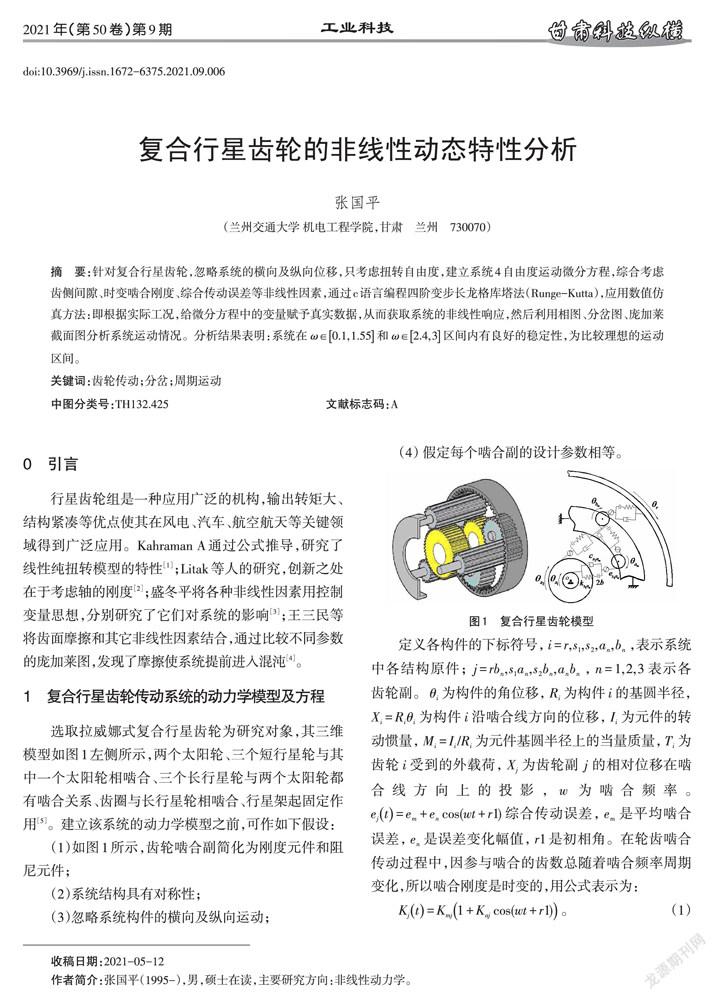
选取拉威娜式复合行星齿轮为研究对象,其三维模型如图1左侧所示,两个太阳轮、三个短行星轮与其中一个太阳轮相啮合、三个长行星轮与两个太阳轮都有啮合关系、齿圈与长行星轮相啮合、行星架起固定作用。建立该系统的动力学模型之前,可作如下假设:
(1) 如图一右图所示,齿轮啮合副简化为刚度元件和阻尼元件;
(2) 系统结构具有对称性;
(3) 忽略系统构件的横向以及纵向运动;
(4) 假定每个啮合副的设计参数相等。
3 结论
本文研究了复合行星齿轮传动系统的非线性特性,在选定的基本参数下,通過龙格库塔数值积分法,绘制出系统齿轮副在[0.1,3]下的分岔图,可以看出系统中每对齿轮副周期啮合运动分岔规律具有一致性;从四副分岔图可以看出系统在[0.1,1.55]和[2.4,3]区间内系统有良好的稳定性,为比较理想的运动区间。
参考文献:
[1]Kahraman Ahmet. Free torsional vibration characteristics of compound planetary gear sets[J]. Mechanism and Machine Theory,2001,36(8):
[2]Grzegorz Litak,Michael I. Friswell. Vibration in gear systems[J]. Chaos, Solitons and Fractals,2003,16(5):
[3]盛冬平,朱如鹏,陆凤霞,靳广虎.多间隙弯扭耦合齿轮非线性振动的分岔特性研究[J].振动与冲击,2014,33(19):116-122.
[4]王三明, 沈允文, 董海军.含摩擦和间隙直齿轮副的混沌与分叉研究.机械工程学报, 2002,38(9): 8-12
[5]冯长先. 齿轮系统动力学及参数合理匹配研究[D].兰州交通大学,2013.
