风光互补发电系统中静止同步补偿器协同控制研究
2021-01-23 07:59黄頔,杨鑫
通信电源技术 2020年19期
黄 頔,杨 鑫
(1.国网湖南省电力有限公司技术技能培训中心(长沙电力职业技术学院),湖南 长沙 410131;2.国网湖南省电力有限公司长沙供电公司,湖南 长沙 410131)
0 引 言
随着含高渗透率分布式电源的微电网推广和规模化应用,电网系统将接入大量具有波动性、随机性、难以准确预测的风能和太阳能。由于风能与太阳能的间歇性会产生其并网电压质量不高等问题,通过优化控制策略减小风光系统并网影响,提高电力系统电压稳定性,已成为重要的研究课题。
目前,通常都是利用逆变器的控制策略来改善并网电压的情况以减小风光互补发电系统接入电网后对系统电压稳定性的影响。如何将稳压性能优越的静止同步补偿器与风光互补发电系统结合起来优化其并网电压质量还有待进一步深入研究。
静止无功补偿装置包含逆变设备、并网线路和数字控制3个部分。其中,逆变设备起到一个电压源转换器的作用将直流转化为可控交流电压;并网线路则用于承担由可控交流电压与系统节点电压之差引起的无功、有功功率交换;数字控制部分可利用不同控制算法来优化静止无功补偿器输出结果,有效维持并网电压稳定性。
为了抑制风光互补系统并入电网产生的电压波动[1],在风电系统中接入静止无功补偿装置,并对风电系统在稳态情况下风机的并网电压质量提升进行了验证[2]。文献[3]则针对STATCOM装置如何在风速变化的情况下减小风机并网产生的电压波动进行了研究。在系统发生故障并被切除的情况下,STATCOM能对系统进行无功补偿,支撑系统电压水平。
从上述文献可知,STATCOM在电力系统中是补偿无功和稳定电压的重要设备,其控制策略决定了其输出效果[4,5]。因此,在风光互补系统中优化静止无功补偿装置的控制算法对整体系统电压质量提升有着重要意义。
PI控制是现有的常规控制方法。本文为优化静止无功补偿器输出电压,结合微分博弈理念克服STATCOM直流电压控制器和交流电压控制器之间的负交互作用,从而优化STACOM的电压输出质量。
1 静止同步补偿器的传统PI控制仿真
静止同步补偿装置可通过可控硅进行电抗器导通角的调节,进而开展容性无功补偿[6],而电子开关的控制策略最常见的就是PI控制。针对静止无功补偿装置的PI控制包括一个交流电压控制器和一个直流电压控制器[7]。交流电压控制器主要是通过调节静止无功补偿装置与所控制线路之间的无功功率交换量来进行电压控制,其控制变量为m:

式中,KACP为比例调节系数,KACI/s为积分调节系数,通过相关系数控制来维持交流侧电压的稳定。
直流电压控制器则是通过控制静止无功补偿装置与系统交换的有功功率进行电压控制,其控制变量为ψ:

式中,KDCP为比例调节系数;KDCI/s为积分调节系数,通过相关系数控制来维持直流侧电压的稳定。
同时,静止同步补偿器的传统PI控制的状态量如下:

本节将对静止无功补偿装置在PI控制下的输出电压质量进行仿真,通过Matlab/Simulink来仿真验证进行PI控制的静止无功补偿装置的输出电压的稳定性是否能达到比较理想的状态。
在模拟系统中输入一个阶跃性扰动用于模拟整个系统发生波动的情况,将PI控制的直流、交流控制器设定在同一参数假定下,直流电压控制器的PI参数设定为KDCP=10.0,KDCI=10.0,交流电压控制器的PI参数设定为KACP=10.0,KACI=3.0。
具体仿真情况如下:
情况1:在t=0 s时,使静止同步补偿装置实际电压与理想电压幅值差设定为0.125 p.u.,即ΔVDC=0.125 p.u.,在此情况下系统电压受震荡后恢复状况如图1(a)、图1(b)所示,整体状态量变化情况如图1(c)所示。
情况2:在t=0 s时,使静止同步补偿装置实际电压与理想电压相位角差设定为0.125 p.u.,在此情况下系统电压受震荡后恢复状况如图2(a)、图2(b)所示,整体状态量变化情况如图2(c)所示。

图1 直流电压变化时,传统PI控制的仿真情况
由图1可见,当静止同步补偿装置直流控制器输出电压幅值差发生变化且系统遭受扰动时,传统PI控制策略虽然在一段时间的振荡后最终能维持系统稳定,但其振荡频次加高,且振动的幅值较大。从图2中也可看出,交流控制器的输出也能维持系统最终达到稳定运行状态,但是效果并不理想。
同时,PI控制策略的参数改变也会影响最终的仿真结果,因此在传统PI控制策略中还需要选取更合适的PI控制参数。即使对PI控制参数进行了优化,无法考虑直流、交流控制器所占权重的PI控制仍旧会有负交互作用的影响存在。为了使静止无功补偿装置的输出更加稳定、消除PI控制策略存在的负交互作用,则需要进行控制策略的改良与优化。
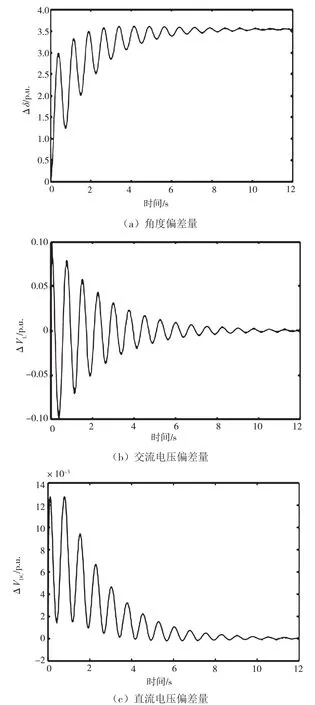
图2 交流电压变化时,传统PI控制的仿真情况
2 微分博弈协同控制
2.1 博弈理论
博弈理论目前已经形成了一套比较成熟的理论体系,博弈论本身的模型包括参与人、战略、支付、信息、行动、均衡以及结果8个组成部分[8,9]。参与人是指博弈论中的决策主体,也是构成博弈关系的基本要素。每个博弈主体的目的都是使自己的目标最优化,当参与者的目标存在冲突情况时就会通过博弈行为进行均衡[10],也就是纳什均衡。该均衡对于每一个参与者来说都是相对比较优化的结果。静止无功补偿装置的交流控制器与直流控制器也是一个多主体的动态协调过程,因此可考虑使用微分博弈进行控制优化。
本文将基于微分博弈理论对静止无功补偿装置的直流控制器和交流控制器进行协调控制。直流控制器的控制属于无反馈控制采用开环微分博弈控制策略,交流控制器则采用具有反馈的反馈微分博弈控制策略。
2.2 微分博弈的模型
微分博弈控制理论属于博弈论的一个研究分支,主要用于存在假设条件且未来信息不确定的问题研究。微分博弈控制策略中的动态量采用微分形式来体现其与时间变化之间的关系,同时各个状态变量均需寻求自己收益最大化。例如,在一个普通的n人微分博弈中,博弈方i都希望满足如下条件:

式 中,i∈N={1,2,…,n},同时,状态量满足如下的状态方程:

式中,x(s)∈X⊂Rm表示博弈过程中的状态变量;ui∈Ui是博弈方i的控制变量,其中i∈N。
方程f[t,x,u1,u2,…,un]、Ji[t,x,u1,u2,…,un]以及qi(·)都是可微分的函数,其中i∈N,t∈[t0,T]。
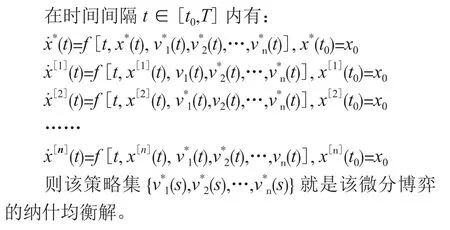
设策略集{v*1(s),v*2(s),…,v*n(s)}是n人非合作微分博弈的纳什均衡解,即式(4)和式(5)的解,此时,该策略集满足下面的不等式(6),并且vi(s)∈Ui,i∈N。

3 微分博弈协同控制算法仿真
在进行仿真时,假定此时的系统扰动为一个阶跃性的扰动,当ΔVDC为0.125 p.u.时,仿真情况如图3所示。通过改变ΔE'q的值代替ΔVL,初始值为0.125 p.u.时,仿真结果如图4所示。可知STATCOM的微分博弈协同控制具有很好的稳定性。
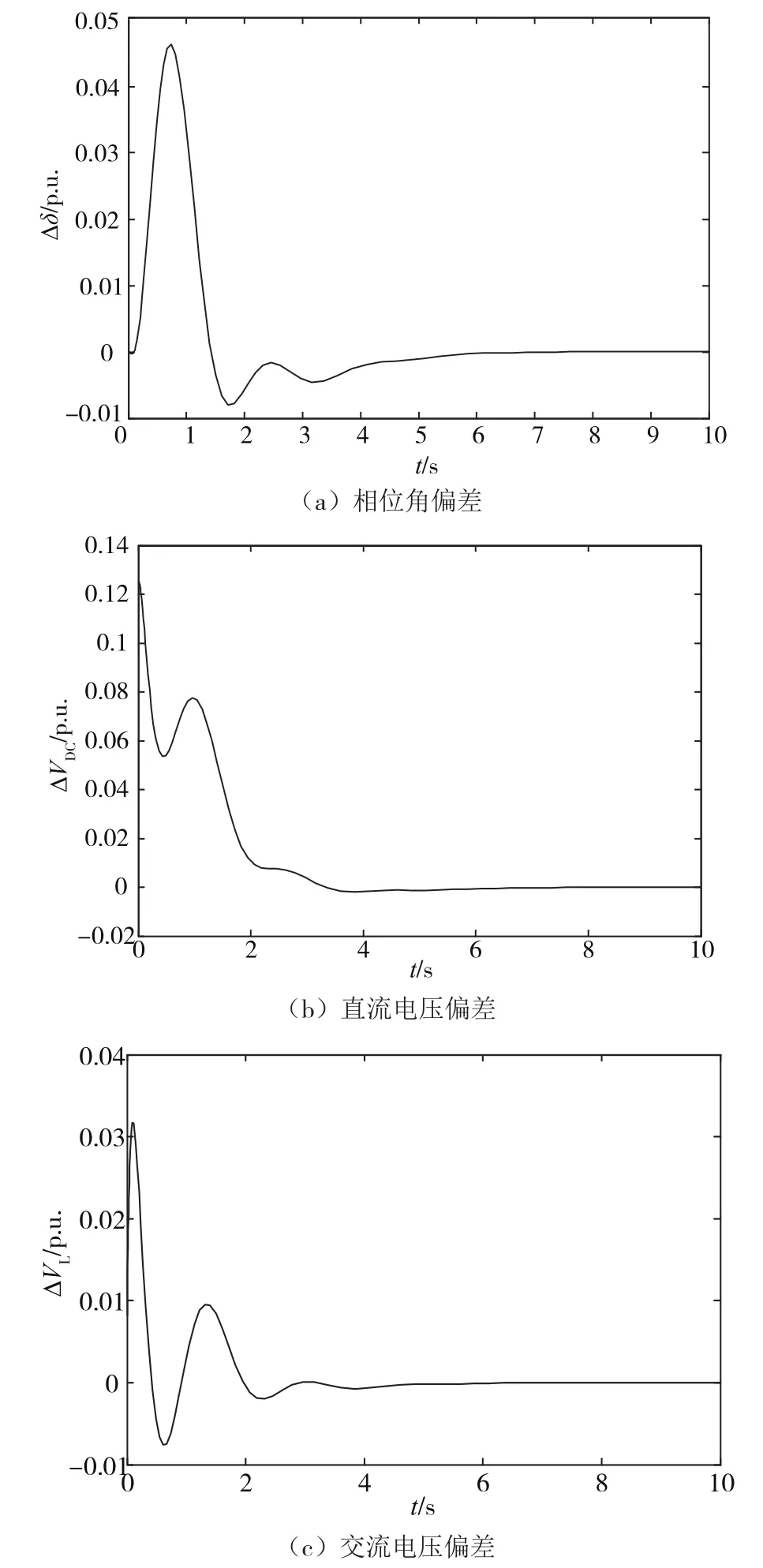
图3 直流电压变化时,微分博弈协同控制的仿真情况
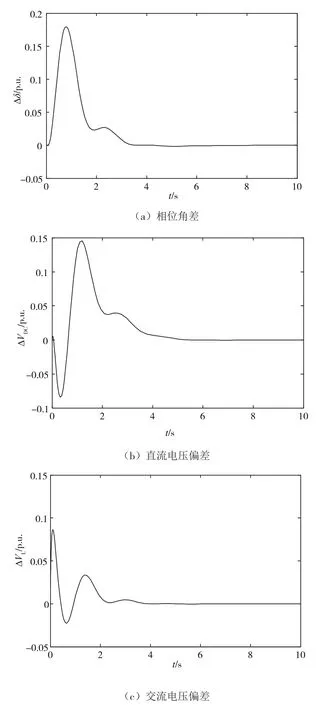
图4 交流电压变化时,微分博弈协同控制的仿真情况
图5为分别采用微分博弈协同控制算法与传统PI控制算法的系统电压下相角与幅值的对比图形,在ΔVDC为0.125 p.u.时微分博弈协同控制下的系统电压的相角、幅值和STATCOM直流侧电压的收敛速度都优于传统PI控制。采用微分博弈系统控制算法的静止无功补偿器克服了PI控制会出现的负交互现象,输出电压具有更优越的稳定性。
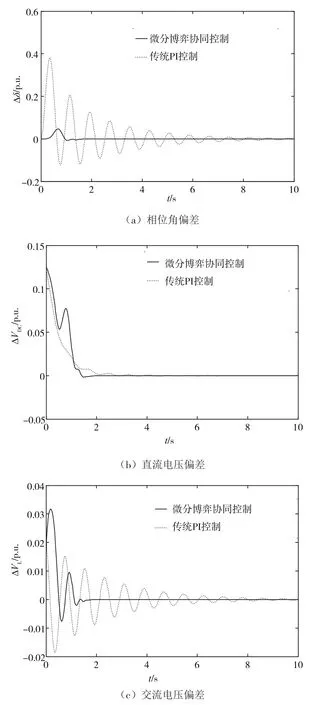
图5 PI控制和微分博弈协同控制效果比较
4 结 论
本文以小型风光互补发电系统为试点,针对目前大规模间歇性能源接入电网对电网电压稳定性产生的影响进行控制策略优化,利用具有良好稳压性能的静止同步补偿器,对不同运行方式下风光互补发电系统中的静态和暂态电压稳定性进行研究,并通过Matlab/Simulink仿真进行了验证。与传统PI控制相比较,可知微分博弈协同控制能够更快地将系统电压相角、幅值和直流侧电压控制到稳定状态,优化输出的电压质量。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电气技术(2022年5期)2022-05-23
导弹与航天运载技术(2022年2期)2022-05-09
宁夏电力(2022年1期)2022-04-29
黑龙江大学自然科学学报(2022年1期)2022-03-29
电子制作(2019年19期)2019-11-23
玻璃(2019年3期)2019-04-01
北京航空航天大学学报(2017年10期)2017-04-20
飞碟探索(2016年11期)2016-11-14
考试周刊(2016年44期)2016-06-21