
基于改进型ESO的表贴式永磁同步电机无位置传感器控制
2021-02-05 09:51孙佃升
电气传动 2021年3期
孙佃升
(1.滨州学院电气工程学院,山东 滨州 256600;2.滨州学院航空特种电机及其控制研究中心,山东 滨州 256600;3.滨州市电气传动重点实验室,山东 滨州 256600)
永磁同步电机(permanent magnet synchronous motor,PMSM)的高性能控制算法中普遍需要实时检测转子的位置和转速,而采用传统的机械或者光电式传感器不仅增加了成本,还增加了故障发生的概率,降低了系统运行的可靠性。因此,不依赖转子位置传感器,而通过检测电机电流、电压等物理量在线实时估计转子位置和转速的无位置传感器控制成为研究的热点[1-3]。
当前研究较多的无位置传感器控制方法大致包括滑模观测器法[4-6]、模型参考自适应法[7]、高频信号注入法[8-9]等。高频信号注入法在电机低速时具有较高的精度,但需电机转子具有凸极特性,且该方法不适用于电机高速运行段。滑模观测器法具有较高的鲁棒性,对电机参数不敏感,但其控制中带来的高频抖振使得观测到的信号需要滤波,而滤波带来信号的相位滞后和幅值衰减不仅增加了后续处理的难度,还降低了转速和转子位移角的估计精度。模型参考自适应算法对电机参数的依赖性高,且算法复杂。对于表贴式永磁同步电机,可利用电感饱和效应构造“饱和性凸极”[10-11]的办法使电机产生凸极性,然后可采用高频注入法实现零速启动和低速运行。
针对表贴式永磁同步电机的中、高速段无位置传感器控制,本文提出采用基于改进型扩张状态观测器(extended state observer,ESO)的转子位移角和转速估计方法:在两相静止坐标系下通过构建以电流为主变量的扩张状态观测器来估计转子位移角,继而通过构建以转子位移角为主变量的扩张状态观测器来估计转速。
1 自抗扰系统及改进型扩张状态观测器
自抗扰控制技术[12-18](active disturbance rejection control,ADRC)自被提出以来,其应用范围不断扩展,日益受到重视。扩张状态观测器是自抗扰控制系统的重要部件,可观测控制系统中难以测量的、未知的变量。
对于含有未知函数的二阶系统:

式中:x,x(1),x(2)分别为系统的变量及其一阶、二阶导数;f0,f1分别为已知和未知函数;w(t)为未知扰动;u为输入变量;b为已知常数。
可构建如图1所示的ADRC控制系统[12,18]。

图1 自抗扰控制系统结构Fig.1 Structure of ADRC
图1中,跟踪微分器(tracking differentiator,TD)用于得到给定信号v的快速跟踪信号及其导数;非线性状态误差反馈控制律(nonlinear states error feed-back,NLSEF)用于根据给定跟踪信号v1和反馈信号z1的差值以及给定跟踪信号的导数v2和反馈信号z2的差值,计算补偿前的控制量u0;扩张状态观测器(ESO)用来对系统中的有关变量和未知量进行观测,同时给出控制量u的补偿值,以抑制系统内部和外部的扰动。
采用文献[19]中提出的改进型ESO,其表达式如下[19]:

式中:z1为y的跟踪信号;β01,β02为参数;α,δ为预设参数。
其中,函数fal(ε,α,δ)如下式:

ESO除用在自抗扰系统中,也可单独使用,用于估计系统中的有关变量。
2 基于改进型扩张状态观测器的转子位移角的估计
表贴式PMSM在两相静止坐标系(α-β系)下的电压方程为[20]

式中:iα,iβ为定子电流;uα,uβ为定子电压;Rs为定子电阻;L为定子绕组等效电感;eα,eβ为反电动势。
反电动势的表达式如下[20]:

式中:ω为转子电角速度;Ψf为转子永磁体磁链;θ为转子位移角。
只要观测出反电动势eα,eβ,就可计算出转子位移角的估计值:

根据式(4)可构造两相静止坐标系下以电流iα,iβ为主变量的改进型扩张状态观测器,其构造过程为:1)计算出主变量的估计值和实际值之间的偏差ε;2)根据ε调节主变量估计值的导数;3)在计算主变量估计值导数时,引入总扰动项Q;4)根据偏差的非线性函数fal(ε,α,δ)确定总扰动的导数。
构造的两相静止坐标系下以电流为主变量的改进型扩张状态观测器如下式所示:

反电动势的估计值为
得到反电动势的估计值后,可根据式(6)计算出转子位移角。式(6)中Δθ为该方法估计出的转子位移角的补偿值。该方法估计出的反电动势波形为正弦,不需要滤波器进行滤波。需要对估计出的转子位移角进行补偿是由于电流、电压信号采集及处理器运算的周期性造成的反电动势估计值对实际值产生的滞后。Δθ的计算可参考下式:

由于电流、电压信号采集的角频率远高于电机转子的电角速度,相对于滑模观测器等需要滤波的方法,该方法估计出的转子位移角所需的补偿值要小很多。
文献[21-22]中采用在两相旋转坐标系下构建自抗扰控制系统估计转子转速,继而通过转子电角速度积分来获得转子位移角。由于转速的估计不可避免地存在偏差,通过电角速度积分的方法获取的转子位移角难免有较大误差。本文采用式(6)计算转子位移角估计值,在精度方面有较大提升。
3 采用改进型ESO提高转速估计的精度
理论上,得到反电动势的估计值后,常规的转速估计方法是根据下式计算:

根据反电动势估计值计算转子位移角的精度较高,但根据式(11)计算出的转速估计值的偏差却较大。为提高转速估计精度,本文采用改进型扩张状态观测器估计转速。
根据电机运动方程可构建改进型扩张状态观测器如下:

式中:εθ为转子位移角偏差为ESO对转子位移角的估计值;θ为转子位移角的实际值,采用式(6)估计出的转子位移角代替,即取为转子电角速度的估计值;Q包含电磁转矩、负载转矩及随机扰动;β01,β02,β03为参数。
由式(12)估计出的转速精度相对于由式(11)计算出的转速精度要高,原因是式(11)计算转速依赖于反电动势eα,eβ的估计值的幅值,反电动势估计值的误差会影响到转速估计精度。而由式(12)计算转速估计值时,依赖的是反电动势的周期信息,转速估计值对电机参数的变化不敏感。在根据式(6)计算转子位移角估计值时,由电机参数变化等因素引起eα,eβ的估计值的幅值的变化刚好抵消。
4 基于改进型扩张状态观测器的PMSM无位置传感器控制系统
构建基于改进型扩张状态观测器的永磁同步电机无位置传感器控制系统如图2所示。该系统采用转速、电流双闭环控制,转速和电流调节器均采用PI调节器,在两相静止坐标系中通过扩张状态观测器估计反电动势,进而计算出转子位移角估计值。通过构建以转子位移角为主变量的扩张状态观测器估计转速。该系统估计出的转子位移角和转速精度均较高。

图2 基于改进型扩张状态观测器的PMSM无位置传感器控制系统结构图Fig.2 Structure diagram of sensorless PMSM control system based on improved extended state observer
5 仿真结果及分析
为了验证所提出方法的可行性,在Matlab/Simulink环境下搭建了系统模型,进行了仿真试验。电机及相关参数设定为:电机极对数p=1,定子相绕组电阻Rs=2.875Ω,电感Ld=Lq=4mH,永磁体磁链Ψf=0.175Wb,电机转轴上的转动惯量J=0.1×10-3kg·m3,仿真步长1× 10-6s。
图3为无位置传感器运行中转子位移角的真实值与估计值的对比,0.3 s时负载突增,可见真实值与估计值基本重合。为清楚显示负载突增时转子位移角估计值与实际值的对比情况,图中进行了局部放大。图4所示为位置角估计值与实际值之间的偏差。

图3 负载突变时转子位移角的真实值与估计值Fig.3 Real and estimated rotor position angle under abrupt load change
由图3、图4可知,转子位移角的估计精度较高,负载突变时未出现较大偏差。
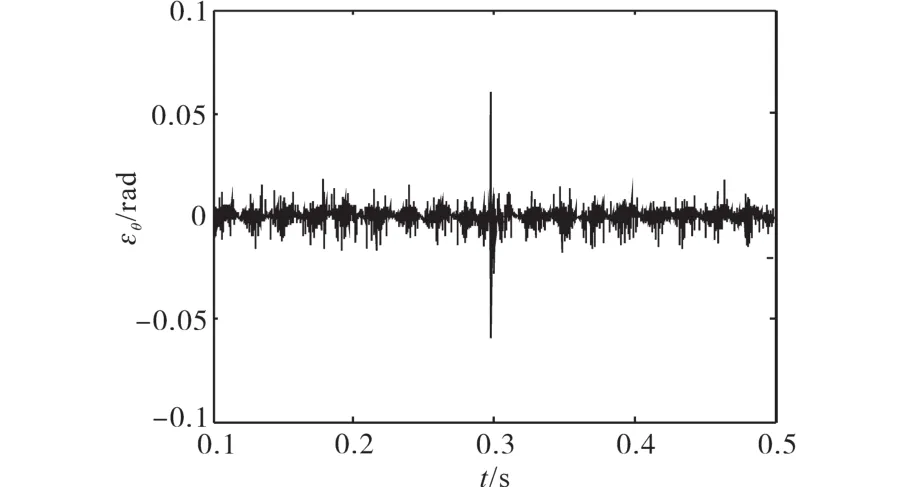
图4 负载突变时转子位移角估计值与真实值之间的偏差Fig.4 The deviation between estimated rotor position angle and real rotor position angle under abrupt load change
为验证本文提出的构建以转子位移角为主变量的扩张状态观测器用以估计转速可使转速估计精度不依赖电机参数,大幅提升转速估计精度的结论,分别就采用常规方法(根据式(11))估计转速和采用本文提出的新方法(根据式(12))估计转速的两种方法进行了仿真对比(本文仅验证电阻参数变化时的情况)。仿真设置为:0.3 s时负载突增,且在0.2~0.4 s区间,电机相绕组电阻由2.875Ω逐步增大至3.075Ω,其它设置同上。图5和图6分别为相绕组变化时采用常规方法和本文提出的方法得到的转速估计值和实际值的对比。
由图5和图6可知,在电机电阻参数变化时,常规方法得到的转速估计值出现大幅变化,偏离实际值较大;而所提出的新方法估计出的转速估计值未出现明显变化。

图5 转速实际值和采用常规方法得到的转速估计值Fig.5 Actual values and estimated values of rotational speed obtained by conventional method

图6 转速实际值与采用新方法得到的转速估计值Fig.6 Actual values and estimated values of rotational speed obtained by new method
6 试验结果及分析
为进一步验证本文所提出方法的可行性,进行了试验研究。自制试验平台由电机控制器、电机及连轴平台、磁粉制动器、转矩检测仪、示波器等组成。试验电机为4极表贴式永磁同步电机,额定功率0.6 kW,额定电流2 A,电感6.2 mH,相电阻0.67Ω。电机控制器采用TI公司TMS320F28335处理器,功率电路采用三相电压型逆变电路,主开关器件为富士公司1MBH60D-100。
图7所示为电机在转速750 r/min下,带4 N·m负载运行时的电压和电流波形。
图8为根据本文提出方法得到的转子位移角的估计值与采用传感器检测到的转子位移角实际值的对比。

图7 试验测得的电机电压与电流Fig.7 The voltage and current measured by test of motor

图8 试验测得的转子位移角的实际值与估计值Fig.8 The actual value measured by test and estimated value of rotor position angle
图9所示为电机在约750 r/min下运行时,根据本文提出方法估计得到的转速值。

图9 试验中电机在750r min运行时转速的估计值Fig.9 Estimated speed of motor at 750 r/min in the test
由图8可见,转子位移角和估计值与实际值非常接近,电机运行于稳态的实测最大误差在0.05 rad左右。由图9可见,稳态时转速估计值较为稳定,精度较高,估计值与实际值之间的最大偏差在5 r/min。因此,实验得到的转子位移角和转速的估计精度较高。
7 结论
本文提出了基于扩张状态观测器的表贴式永磁同步电机的中、高速段无位置传感器控制方法。该方法通过在两相静止坐标系构建以电流为主变量的扩张状态观测器观测反电动势来计算转子位移角估计值,通过构建以转子位移角为主变量的改进型扩张状态观测器来估计转速。该方法对转子位移角和转速的估计精度较高。仿真及实际试验结果证实了所提出方法的可行性。
猜你喜欢
一重技术(2021年5期)2022-01-18
郑州大学学报(工学版)(2020年2期)2020-06-16
中学生数理化·高一版(2019年12期)2019-12-31
汽车电器(2019年2期)2019-03-22
测控技术(2018年4期)2018-11-25
中国钢铁业(2018年6期)2018-07-26
电机与控制应用(2015年2期)2015-03-01
中国钢铁业(2014年4期)2014-08-22
电测与仪表(2014年13期)2014-04-04
中国钢铁业(2014年7期)2014-01-26
