
中低速磁浮线路智能养护技术及装备
2021-02-28 06:54刘飞香张银龙
中国机械工程 2021年4期
宗 斌 刘飞香 张 琨 张银龙
1. 中国铁建重工集团股份有限公司,长沙,410100 2. 中铁第四勘察设计院集团有限公司,武汉,430063 3. 武汉理工大学智能制造与控制研究所,武汉,430063
0 引言
在国家政策和战略引导下,以中低速磁浮交通为代表的,具有绿色环保、造价低、占地少、运行噪声小、适应性强、全天候运营等优势属性的中低运量新型轨道交通制式成为国内很多城市的选择。中低运量新型轨道除可以满足中小型城市主干线轨道交通的发展需求外,还可作为大中型城市的干线延伸、补充线路,以及与卫星城区的连接线路。另外,连接大型景区的游客集散中心与各个景点的轨道交通线路也是新型轨道交通的热门应用方向。
2016年5月6日,长沙磁浮快线作为国内首条中低速磁浮线路正式投入商业运营,该线路采用常导吸式技术,利用电磁吸力将列车悬浮在轨道上方8±2 mm。为保证满足8 mm的运行间隙,对磁浮承轨梁、轨排和接触轨的制造、安装以及维护都提出了毫米级甚至亚毫米级的极高要求。然而,相较于比较成熟的大铁、地铁等传统轨道交通,以中低速磁浮为代表的新型轨道交通制式多数尚处于工程验证、运维摸索的阶段,维护、养护标准体系尚不健全,专业的针对性的智能化养护装备更是严重缺失,与新型轨道交通发展严重不对称,已经成为新型轨道交通系统的一块短板,是新型轨道交通高效率、低成本、高可靠运营的一个制约因素。
1 中低速磁浮线路的特殊设备
1.1 中低速磁浮轨排
与传统铁路的工字型钢轨不同,中低速磁浮轨排(图1)由F形导轨、H形钢枕和紧固件构成。其中的F形导轨为主要部件,由轧制的F形钢毛坯和铝感应板型材经过多断面的亚毫米级机加工而成。长沙磁浮快线的轨排,采用12.5 m的标准长度,F形导轨(简称F轨)之间根据不同的情况设置有不同形式的伸缩接头,全线大部分采用25 m长度的简支梁,如图2所示。

图1 中低速磁浮轨排Fig.1 Medium-low speed maglev track

图2 中低速磁浮简支梁Fig.2 Medium-low speed maglev beam
中低速磁浮交通系统的车-轨关系是列车能否安全平稳运行的核心关键点,因此对中低速磁浮轨排的制造和安装都有着很高的精度要求[1-2](表1、表2),其中的轨距(轨排两侧F轨磁极面中心线之间的距离)、水平(两侧F轨顶面高差)、高低(轨道竖向的平顺性)、方向(轨道横向的平顺性)、轨道接缝(也称“错台”,相邻两轨排的竖向和横向高差)以及轨缝(相邻两组轨排的间距)等指标直接反映了轨道的平顺性。

表1 《湖南省中低速磁浮交通工程质量验收标准》F轨机加工部分要求Tab.1 Machining requirements of F track in 《Standard of Hunan for quality acceptance of medium and low speed maglev transit engineering》

表2 《湖南省中低速磁浮交通设计标准》轨道平顺度要求Tab.2 Track regularity requirements in 《Standard of Hunan for design of medium and low speed maglev transit》
1.2 轨道平顺性指标对中低速磁浮列车的影响
由文献[3-4]可知,在常导吸式悬浮系统中,电磁吸力F的计算公式为
(1)
从式(1)中可以看出,在不考虑空气磁导率μ0、电磁铁线圈匝数N变化的情况下,当轨道出现错台导致磁极面积A发生变化,或者轨道出现不平顺导致悬浮间隙x发生变化时,为保障悬浮间隙控制在8±2 mm的安全范围内,悬浮控制系统将通过调整控制电流i来调整电磁吸力。图3为一组实际提取的悬浮间隙和控制电流的对比图,可以看出在悬浮间隙出现明显变化时,悬浮控制电流也出现了相应的较大波动。

图3 悬浮间隙与控制电流实际对应关系Fig.3 Relationship between suspension gap and control current
以上现象及结论与文献[5-6]所讨论的结果一致。轨道的不平顺会由悬浮间隙传感器反映到悬浮控制器从而对悬浮状态不断进行调整,一定范围内的悬浮状态调整会反映于列车乘坐的舒适性,超出范围的轨道不平顺引起的悬浮状态调整可能导致悬浮失稳,出现悬浮“掉点”甚至“砸轨”等故障现象,影响磁浮列车的舒适性和安全性。
1.3 中低速磁浮接触轨
接触轨是为中低速磁浮列车输送高压电的设备,长沙磁浮快线采用的是钢铝复合型接触轨,截面为“C”形结构(图4),每节供电轨长约12 m,通过间隔为3 m的绝缘支撑固定在梁体两侧面预留的预埋槽道上,每约50 m设置一处膨胀接头(图4),梁两侧分别为正极供电轨和负极回流轨。

图4 C形接触轨的膨胀接头Fig.4 The expansion joint of C shape contact rail
由于列车采用侧面受流方式,因此中低速磁浮系统的靴-轨(接触轨)关系是列车安全平稳运行的又一个关键点。理想的受流靴与接触轨的接触状态为两个平面的接触,接触轨的平顺性情况直接影响列车受流的稳定性和可靠性,超出合理范围的不平顺会引起受流靴在接触轨面的“弹跳”,影响受流的稳定,甚至产生“拉弧”现象,对供电系统产生冲击并灼伤接触面,产生安全风险;超出合理范围的轨缝会增大受电靴接触面的磨耗,甚至导致靴-轨碰撞而影响列车安全运行。
2 中低速磁浮线路养护的需求及现状
根据中低速磁浮线路的特殊结构、设备以及要求,结合运维情况分析,线路养护的重点内容及养护周期汇总如表3所示。

表3 中低速磁浮线路养护重点项目及解决方案Tab.3 Medium-low speed maglev maintenance key points and maintenance solution
以往在中低速磁浮线路的轨道和接触轨的安装、运维中多采用人工测量的方式,基于较通用的悬线测量等方法,存在效率低、人工成本高、精度差、人为误差不可控等问题,在施工建设阶段无法对全线的轨排安装进行统一的精度控制,也难以实现轨排状态全生命周期的监控。另外,中低速磁浮线路的梁体很多采用的是轻量化的简支梁结构(例如长沙磁浮快线),梁体外侧、疏散平台和梁体间的电缆通道等区域成为检修人员难以到达的位置,使得这些位置的接触轨、支座、线缆、支架和限界等的巡检、养护难度加大,增加了安全风险。
从中低速磁浮线路的安全可靠运营,以及有效控制运维成本的角度考虑,定制化、高精度的现代化养护装备成为刚需。
3 中低速磁浮智能化养护装备
针对中低速磁浮交通,建设领域目前已经形成了具有完全自主知识产权的系统技术,但养护运维仍然处于探索阶段。基于近几年的运营情况,对养护装备的需求已经逐渐清晰,并逐渐认识到:基于中低速磁浮交通特殊的轨道形式和应用环境,定制化的装备是唯一选择。针对表3中提出的不同养护项目需求和周期,并结合中低速磁浮工程车设计建议[7],考虑轨排、接触轨、梁和线路附属设施等多个方面,讨论并提出中低速磁浮系统的新型智能化养护和运维装备及系统的解决方案,简要分析如表3所示。
3.1 中低速磁浮智能巡检车
中低速磁浮线路普遍采用高架形式,检测精度和检测频率要求高,人力巡检难度大,因此一种小型化、轻量化、智能化的巡检车装备成为合适的解决方案。基于AI图像识别技术、“弦测法”轨检仪技术以及基于大数据处理的全寿命周期管理技术,研发了高精度、高效率、高标准智能巡检车。并基于中低速磁浮的特殊性能,进行了多个方面的优化设计:采用新能源蓄电池动力,以满足中低速磁浮绿色环保的属性;采用特殊的胶轮,以轮轨形式走行在F轨的滑行面上,防止损坏F轨和铝感应板;以“抱轨”的形式,在轨排两侧设置安全轮,进一步保证行车安全。研发的中低速磁浮智能巡检车的结构如图5所示。

图5 磁浮智能巡检车Fig.5 Medium-low speed maglev intelligent inspection vehicle
该磁浮智能巡检车具备的主要功能如下:
(1)运送人员及工具。可运送约4~6人的检修班组及工具物料快速抵达作业地点,运行速度宜为25 km/h左右,主要解决高架线路区间,检修人员及物料快速安全抵达现场的问题。
(2)日常巡检。在感应板、接触轨、疏散平台等区域用工业高速相机进行图像采集,解决以往人员不便到达位置的巡检问题。其中,对于感应板的受损情况,可以引入AI图像识别技术,筛选出可能存在问题的点。
(3)线路检测。针对轨排、供电轨等的线形平顺性情况的检测,采用成熟的“弦测法”[8]轨检仪技术,以1 m固定弦长的基本结构,在弦两端及弦中间位置分别设置误差在0.01 mm以下的激光位移传感器,形成“三点弦测法”的静态轨检模型,如图6所示。将此模型布置在需要检测的水平、高低、轨向等检测面上,并采用“以小推大”的计算模型[9],就可以测量出4 m或10 m弦长的平顺度情况,并对比相应的允许偏差得出超差情况。

图6 静态轨检模型Fig.6 Static detection module
对于轨排、供电轨的错台、轨缝的超差情况,可利用同个或相邻激光位移传感器在轨排、供电轨接头位置的直接测量值以及脉冲时差换算得出,然后对比相应的允许偏差值就可得出超差情况。
(4)智能巡检。结合智能运维管理系统,实现线路检测数据及结果的实时呈现,同时应具有远程实时传输、历史数据比对、全生命周期管理等能力,结合云平台技术实现装备的智能化。
基于既有线路的运营经验和养护需求,该装备的使用频率可为每周2~3次。
3.2 F轨综合作业车
中低速磁浮F轨综合作业车除了能够应对高架工况的简支梁侧面等特殊位置检修外,同时也能够实现与传统轮轨制式类似的故障列车救援功能,其结构如图7所示。同样,为了更好地符合磁浮交通绿色、节能的理念,该作业车以高可靠、大牵引力为设计原则,采用新能源蓄电池组为动力,采用胶轮走行的轮轨模式设置安全轮。该车具备的主要功能包括:①能够满足对故障磁浮列车在最大坡道工况下(中低速磁浮系统运用的最大坡度为7%)的牵引救援,最大运行速度约25 km/h;②为简支梁侧面的作业区域提供检修平台,可采用伸缩/伸展式吊篮结构,将检修人员输送至作业区域;③能够为联挂的其他特种作业平台提供牵引动力。基于既有线路的运营经验和养护需求,该车的使用频率约为每月1次。
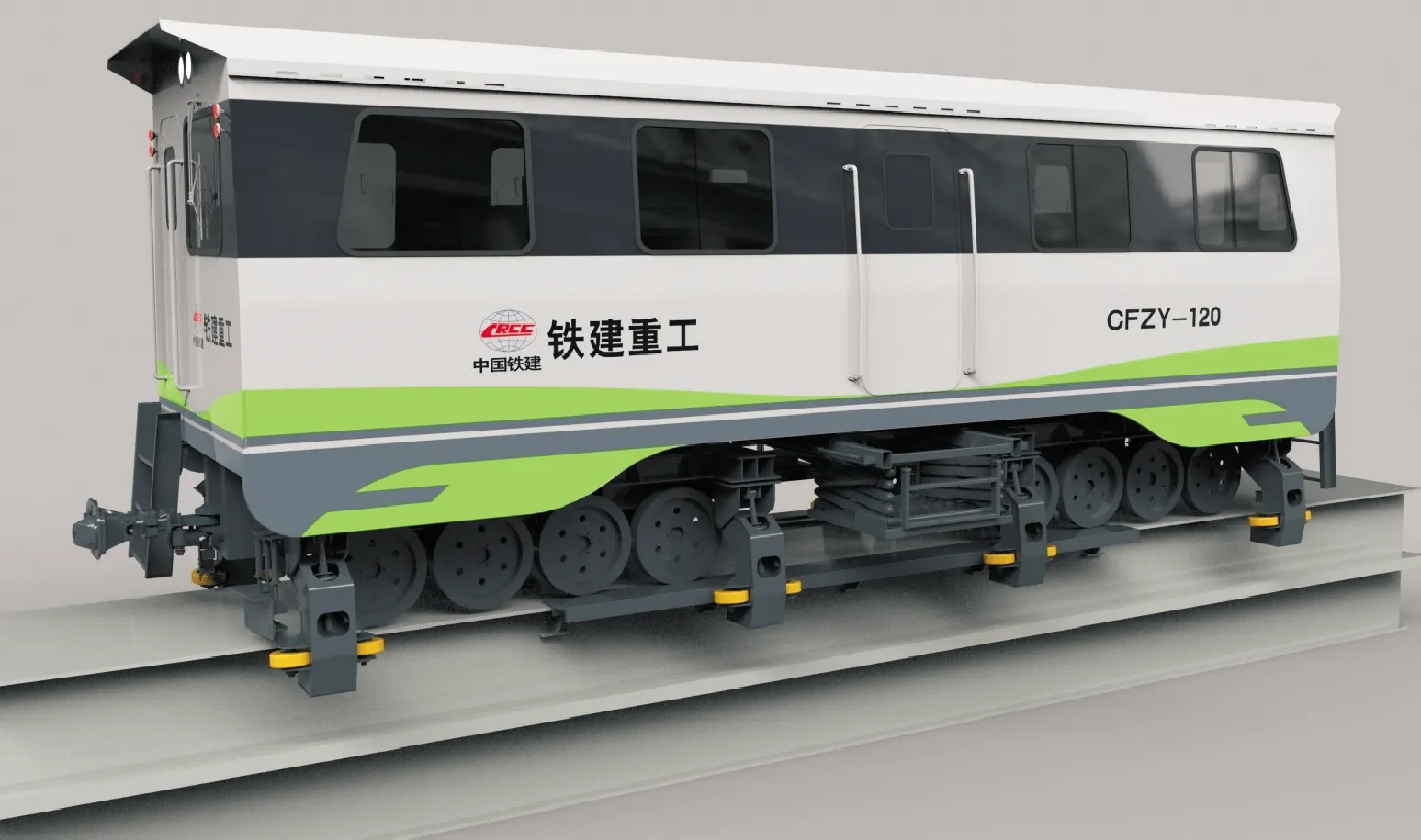
图7 F轨综合作业车Fig.7 Multi-function maintenance vehicle
3.3 特种作业平台车
针对除冰雪、更换轨排/供电轨等特种作业需求,本项目组设计研发了中低速磁浮特种作业平台车,结构如图8所示,其自身可不带动力,由F轨综合作业车提供牵引动力。可采用模块化设计原则,为除冰、除雪、换轨等不同作业需求设计相应模块,解决特殊情况下作业需求,在满足功能需求的同时,提高装备的利用率。根据线路情况的不同,该装备的使用频率约为每半年1次。

图8 特种作业平台车Fig.8 Special maintenance platform
3.4 智能运维管理系统
目前国内中低速磁浮交通作为交通辅助线、专线或旅游线等相对独立运行的模式,较市内轨道交通系统更轻量化,但是其列车、轨道、道岔等设备的复杂和自动化程度较高,适合针对性地开发和配套基于云平台技术的智能化、轻量化运维管理系统,系统结构如图9所示。可利用物联网、5G传输等技术,综合各智能巡检、轨检装备的数据,以及整合磁浮列车、道岔、信号等系统设备状态数据,通过人工智能、大数据分析等手段,将汇总的大量数据与历史数据、故障、处理情况进行比对,经过机器学习、预判自动生成作业派单,指导各项设备设施的养护,对养护人员及设备进行合理化调配,并监控养护作业流程,施行闭环控制,达到避免出现养护真空期和过度养护的目的,可实现或部分实现由“故障修”向“状态修”的改变,有效降低运维成本。
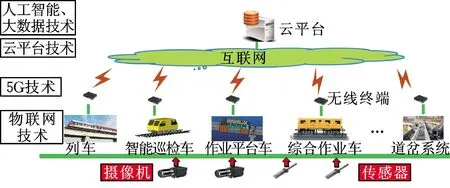
图9 智能运维管理系统Fig.9 Intelligent operation and maintenance management system
4 结语
针对中低速磁浮交通这类新型轨道交通系统,定制化开发专业的养护装备是保障其稳定安全运营的必要条件。针对中低速磁浮线路养护的高精度、高标准、高指标,以及其特殊的应用条件要求,自动化、智能化的养护装备能有效提高作业效率、降低人工成本、提高安全性,是其全生命周期管理的关键,也是中低速磁浮交通等新型轨道交通推广应用的重要因素。
猜你喜欢
国防交通工程与技术(2021年2期)2021-03-17
装备制造技术(2020年2期)2020-12-14
自动化学报(2019年12期)2020-01-19
中国交通信息化(2019年5期)2019-08-30
今日农业(2019年12期)2019-08-15
四川水泥(2018年11期)2018-11-26
能源(2018年8期)2018-09-21
能源(2017年11期)2017-12-13
现代工业经济和信息化(2016年8期)2016-05-17
汽车与新动力(2012年5期)2012-03-25
