
变形机翼的发展现状综述
2021-03-01 02:45段富海初雨田关文卿来进勇
机电工程技术 2021年1期
段富海,初雨田,关文卿,来进勇
(1.大连理工大学机械工程学院,辽宁大连 116024;2.兰州万里航空机电有限责任公司,兰州 730070)
0 引言
自飞行器诞生以来,设计师一直在尝试各种方法来提高其飞行性能。传统飞行器专为特定的飞行条件和飞行环境而设计,在某个设计状态点下能表现出较好的飞行性能,大多数情况下性能不佳。然而,现代飞行器由于需要进行军事侦察、大机动作战、远程运输、医疗救灾等多种任务,不仅对于巡航速度、有效载荷有更高要求,所面临的飞行状态和飞行环境也更加复杂[1-2]。传统飞行器僵硬的机身结构无法适应不同的空气动力学条件,因此无法保证优良的飞行性能。
变体飞行器可通过局部或整体改变飞行器的外形形状,使飞行器能够实时适应多种任务需求,并在多种环境下保持最优性能和效率[3]。飞行器外形变化包括弯度、厚度、展弦比、翼面形状等,因此变体飞行器并不是一个严格的概念。目前普遍认为的变形范围是展弦比变化200%、翼面积变化50%、后掠角变化20°。相比于传统飞行器,变体飞行器具有以下优点[4]:(1)可以改善飞行器的气动特性;(2)可以增强操纵和控制能力;(3)可以实现多种任务需求;(4)可以提高飞行器的作战性能;(5)可以降低飞行器的飞行能耗;(6)可以改善发动机的性能;(7)可以扩大其在军事和民用领域的应用范围。基于上述优点,变体飞行器的研究已经成为航空航天领域的科研前沿和研究热点[1,5]。
变体飞行器需要在不同飞行环境和状态下执行不同属性的任务或组合型任务,这不仅要求变体飞行器能够进行连续性、大尺度、高速率的主动变形,还需要在执行任务的过程中实时感知飞行器气动外形变化[6]。20世纪,人们为了追求更高的飞行速度和有效载荷,一方面将机身结构造得刚硬,无法实现连续稳定的大变形;另一方面作动器及变形机构给机身带来的额外重量也限制了变体飞行器在当时的发展。近年来,随着智能材料等相关技术的快速发展[7],使变体飞行器各种变形方式的实现成为可能。
1 变形机翼及发展历程
机翼是飞机中最关键的部分,其提供了飞行所需的大部分升力和操纵力,并且其形状和尺寸决定了飞机对特定任务的适用性。机翼性能的优劣将直接影响飞机飞行性能的好坏,因此,对变体飞行器的研究实际上大部分集中在变形机翼的研究。对于低速飞行的飞行器,机翼应该具有高纵横比和低后掠角。与此相反,高速飞行需要低纵横比和高后掠角。如何根据环境和状态以有效和可逆的方式进行大配置改变,使得单个飞行器可以最佳地执行多个任务,这是飞机设计师通过开发变形机翼技术而实现的目标。因此,近年来变形机翼的概念在航空航天领域引起了学者及专家们极大的兴趣[8-9]。
图1所示为变形机翼发展历程简图,尽管变体飞行技术是一个相对较新的技术,但是改变机翼平面形状的设计却是由来已久。早在1903 年,飞行的先驱莱特兄弟利用滑轮和缆绳扭曲翼尖,实现侧滚控制[10]。1916年,美国人申请了第一个关于可变弯度机翼的专利,随后相继出现多种变形机翼的设计,甚至有学者利用可变弯度机翼、伸缩机翼等进行试飞,然而这时变形机翼并没有进入工业化生产阶段[8],一个可能的原因是人们认为柔性的变形机翼无法承受由于飞行速度和飞行器质量增加产生的高载荷。

图1 变形机翼发展历程简图
二战之后,为了实现超音速飞行,变形机翼的概念再次出现在人们的视野。此时变形机翼以可变掠角这种简单变形方式为主,通过掠角变化解决战机高低速性能要求的矛盾。然而,随着各项技术的发展,研究人员对于变形机翼的研究不再满足于局部改变固体机翼元件的位置和角度,因为这样的简单变形方式无法使飞行器达到最优气动特性。设计者希望能够开发无缝隙、主动驱动控制、气动特性最优并且能够感知外部载荷的变形机翼,以适应复杂的飞行环境和多种飞行状态[9]。
基于这种目的,自1979 年以来相继实施了自适应机翼研究(Mission Adaptive Wing,MAW)、主动柔性机翼研究(Active Flexible Wing,AFW)、主动气动弹性机翼研究(Active Aeroelastic Wing,AAW)、“智能翼”研究(Smart Wing)、变体飞行器结构研制(Morphing Aircraft Structures,MAS)等多项变形机翼研究计划。开发者试图通过利用先进材料和控制技术使得机翼外形得到彻底改变[8]。
从变形机翼的发展历程不难看出,随着人们对飞行效率和多任务适应性等要求不断提高,变体飞行器由刚性变形向柔性变形发展,由被动变形到主动变形发展,变形方式也不再是单个构件的局部变形,而是朝着多种变形组合的方向发展。近年来,卫星通讯服务的爆炸式增长使无人机成为许多常规应用的首选技术,将变形机翼技术应用在无人机上,提升无人机的飞行效率将是下一个研究热点[11]。
2 变形方式
变体飞行器根据机翼变形尺度的大小可以分为小变形、中变形及大变形3 种[2]。其中大变形方式主要包括折叠翼、伸缩机翼、后掠角变化、展长变化、翼面变化等几类,值得注意的是,大变形方式会对飞行器气动特性产生较大影响。中变形方式包括扭转机翼、柔性小翼、可变弦长机翼和可变弯度机翼。可变翼型翼和凸出翼属于小变形范畴。飞行器可以利用变形机翼完成多任务的同时还能保持良好的飞行性能。例如,具有折叠机翼或可变后掠角机翼的战斗机在高速和低速时都可以具有良好的性能,这可以减少燃料消耗并显著改善飞行包线。具有可变弦长或可变弯度翼的飞行器可以具有更短的起飞距离。伸缩机翼、柔性小翼和扭转机翼可以改善低速飞行器的空气动力学性能。此外,根据机翼平面为基准,变形机翼又可以分为3 种[4]:面内变形、面外变形和翼型变形。具体分类如图2所示。
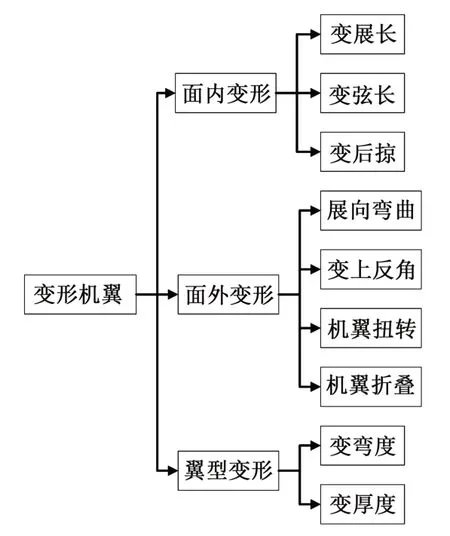
图2 变形机翼分类
2.1 面内变形
2.1.1 变展长
大展长机翼升阻比可得到改善,续航和起降性能较好,但缺乏可操作性并且巡航速度相对较低。相比之下,具有低展弦比机翼的飞行器所受阻力更小、速度更快、机动性更高,但空气动力学效率较差。变展长机翼可将2种设计的优势集成到单架飞行器中,并且可利用两侧机翼变形量不同获得附加滚转力矩,便于飞行器的横向操纵。

图3 变形翼展增加
Vale等[12]提出了一种具有共弯度变形能力的伸缩翼的航空结构。如图3所示,外翼的前后缘和内部之间存在碳纤维结构,用于支撑和引导滑动内翼的前后缘,从而改变翼展,其中的碳纤维结构代替了传统的翼肋。Blondeau等[13]设计的变形机翼主要由气动伸缩翼梁、刚性蒙皮和肋骨元件等组成,由于机翼截面的接缝会产生寄生阻力,伸缩翼的空气动力学性能受到一定影响。Ajaj等[14]设计的齿轮驱动自动双翼结构如图4所示,该结构适用于小型无人机,可变展长高达100%。该结构优于传统的伸缩式和铰链式结构,因为其使用机翼两侧的可用空间,而不是依赖于重叠的结构和轴承,除此之外,由于驱动蜗轮的低导程角,其具有自锁驱动机构。

图4 齿轮驱动自动双翼概念图
2.1.2 变弦长
变弦长机翼可以通过改变弦长进而改变展弦比及机翼面积,使飞行器适合更广的速域。传统机翼的弦长是通过螺旋机构驱动前缘或后缘襟翼变形来改变,机翼中由于存在翼梁、油箱和其他部件,变形和空气动力载荷所需的大位移使得变弦长机构设计十分复杂。
Reed 等[15]设计了一种变弦长机翼结构,旨在增强无人机的机动性。如图5所示,借助互穿翼肋机构通过微型直流电机和导螺杆机构改变弦长,安装在翼根和翼尖的电机同步带动导螺杆螺母旋转,进而导螺杆线性移动驱动前缘和后缘导轨。该结构可将翼面面积增大80%。Khoshlahjeh等[16]研究了多任务直升机转子叶片的弦扩展结构,利用后缘板在叶片展长的63%和83%之间的切口延伸,可以使直升机有效弦长增加20%,并且通过将计算流体动力学增量添加到基线空气动力学系数,改进了翼型截面的动力学模型。
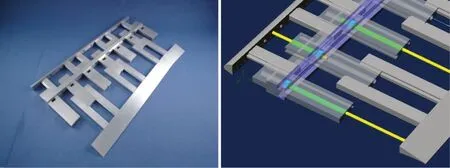
图5 变弦长机翼
2.1.3 变后掠
可变后掠角机翼并不是一个新的概念,二战之后航空领域进入喷气机时代,飞行速度的提高代表了新的战术优势,减少飞行器高速飞行阻力最有效的方法是采用较大的后掠角,降低展弦比,然而飞行器若采用大后掠角机翼,其低速飞行时气动效率就会降低。可变后掠角机翼则可以解决高低速性能要求的矛盾。
Mattioni 等[17]提出了一种基于多稳态结构的可变后掠角机翼,主要由两根翼梁组成,翼梁之间利用相互连接的桁肋连接。通过有限元分析研究了该结构的性能,并建立了实验模型来研究实际翼盒的结构和运动特性,成功地实现了掠角变形。Jesse 等[18]提出了一种具有可变后掠角机翼的超音速商务机。该飞机在亚音速或者低速条件下,掠角变化量可达35°,而在超音速飞行条件下,掠角变化量可达60°。Chen 等[19]研究了可变掠角机翼对飞机雷达散射截面特性的影响,以降低飞机雷达散射截面面积和敌方雷达的探测概率,研究结果表明,当前缘后掠角为33°时,飞机头部方向雷达散射截面的算术平均值是后掠角为0°时的0.644%。
2.2 面外变形
2.2.1 展向弯曲
展向弯曲机翼技术可以帮助飞行器减少阻力,增加高低速下的稳定性,也可以提高避免失速的能力。NASA的研究人员受生物启发发明了一种超椭圆弯曲型翼展机翼(Hyper-Elliptical Cambered Span,HECS)[20],该机翼相比于平直翼更具气动优势。此概念一出,激励了诸多学者对展向弯曲机翼进行研究。
Sofla 等[2]提出了2 种弯曲机翼:第一种滑动变形翼与变后掠机翼类似,如图6所示,机翼可以通过柔性平行四边形机构沿着机身方向滑动进行弯曲变形;第二种展向变形翼与HECS 类似,如图7 所示,Sofla 等利用形状记忆合金及碳环氧树脂制作了样机,样机在典型工况下表现出了良好的飞行性能。Manzo[21]设计了一种分段式机构,以实现机翼的展向弯曲变形,作动方式分别采用直流电机和形状记忆合金,分析结果显示,形状记忆合金驱动方式更为有效。Wiggins 等[22]利用一种单自由度运动机构和形状记忆合金等研制出一种展向变弯度机翼,并且利用线性空气动力学分析确定了载荷分布,根据重力载荷和动力载荷进行了结构分析。

图6 滑动变形翼概念图

图7 展向变形翼概念图
2.2.2 变上反角
变上反角机翼因其增强飞行器性能和飞行控制的能力而引起广泛关注。变上反角机翼具有以下优势:可以控制气动分布;取代传统的控制面;增强高性能飞行器的敏捷性和飞行特性;通过改变涡量分布减小诱导阻力;改善失速特性等。
佛罗里达大学开发了一种受海鸥启发的变上反角机翼[23],如图8所示,机翼的变形是由机身内线性驱动器控制连接梁系统实现的。分析了几种变形条件下的飞行数据,以确定动态特性的变化程度。侧向动力学模型表明,变上反角机翼对操纵质量和稳定性有较大影响。Cuji等[24]分析了对称和非对称V型变形翼对飞行器转弯动力学性能的影响。通过对转弯飞行性能指标的分析,可以看出非对称V型翼在侧倾角、载荷系数和翻滚力矩系数等方面表现较好。尽管随着翼面上反角的增加,转弯半径和转弯速度的性能有所下降,但是在侧倾角和载荷系数方面有了很大的改善。并且与对称翼相比,非对称翼的翻滚力矩有很大的改善。
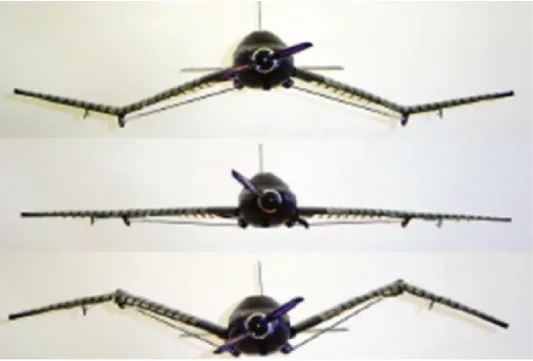
图8 可变上反角机翼模型
2.2.3 机翼扭转
通过机翼扭转提高飞行器的飞行性能和控制并不是一种新技术。莱特兄弟就曾利用机翼扭转技术对飞行器进行侧滚控制。不同于变展长和变后掠机翼,机翼扭转变形可以在不需要复杂沉重的机械装置条件下就对升降表面的气动性能产生较大影响。此外,扭转变形还具有减轻阵风和操纵负荷、增加升力系数以及取代传统的控制面等优点。
Ajaj等[25]介绍了一种新型主动气动弹性结构装置的概念,通过该装置可以实现机翼的扭转变形。如图9所示,自适应扭转翼是一种薄壁封闭截面双翼箱体,其扭转刚度可以通过改变前后腹板之间的封闭面积来调整。当腹板相互靠近时,结构的扭转刚度降低,而其在展向的弯曲刚度不受影响。扭转刚度的降低允许外部空气动力载荷对结构产生扭转并保持其变形形状。这些扭转变形可以通过改变腹板的相对位置作为飞行条件的函数来控制,以获得最佳性能。分析结果表明,通过移动前翼梁腹板可以显著增加扭矩和升力。Jenett等[26]利用蜂窝复合型材料设计了一种模块化扭转机翼,不仅可以实现连续的扭转变形,模块化装配方式使得机翼制造维修相对简单,同时兼具重量轻、力学性能好和气动性能高等优点。

图9 自适应扭转结构概念图
2.2.4 机翼折叠
折叠机翼通过改变机翼位置影响飞行特性,如爬升率、失速特性和横向稳定性等,另外通过折叠机翼可以减小全机外廓尺寸,因此,折叠机翼更多适用于舰载机,舰载机通常在外翼挂弹,无法采用伸缩式变展长机翼。因此通过机翼折叠技术可以合理、高效地利用航母甲板,增加搭载数量,大大增强航母战斗力。
Su-33舰载机是俄罗斯苏霍伊设计局为航母专门研制的舰载机,该机以Su-27为原型,进行了一系列针对上舰后停放和滑跃起飞的改造,包括尾椎缩短、加强机身和起落架强度、将机翼和平尾设计为可折叠、增加一副鸭翼等一系列复杂操作,改善飞机的升力特性,提高其短距离起飞性能[27]。除舰载机外,近年来有学者将折叠翼技术应用到小型无人机。Mills等[28]利用折叠翼尖影响小型无人机的控制效应,风洞实验结果表明,在面对较大的动压力载荷和迎角时,折叠翼尖可以有效控制小型无人机的横向和纵向稳定性。
2.3 翼型变形
2.3.1 变弯度
尽管可变弯度机翼的想法早就诞生,但要想实现人们理想中的变形以及合适的控制系统却复杂得多。在亚音速状态下,可变弯度机翼可以改变机翼曲率,从而在不同飞行条件下连续地调节机翼的几何形状,增加升阻比。在低速状态下,可变弯度机翼可以改变弯度,控制机翼表面气体流动状况,提高飞行机动性能。
Elzey 等[29]受生物结构启发,设计了一种可逆的形状变形结构作动器,形状记忆合金受热会驱动链环式翼肋弯曲变形,如图10 所示,该设计的核心是可以彼此旋转的链环式翼肋,使得机翼可以不借助任何偏置机构恢复原形状。Monner等[30]利用高度各向异性蒙皮结合运动学和作动器,开发了一种无间隙前缘智能下垂机翼,以实现高升力和无噪声的功效,并且通过实验和仿真验证了这种概念的可行性。Barbarino等[31]研制了一种新型可变弯度后缘襟翼结构,柔性翼肋基于桁架状结构,并且其中一些活动组件由形状记忆合金制成。采用有限元分析方法对结构性能进行了评价,结果表明,该设计具有驱动平稳、机械复杂性低、气动分布好等优点。

图10 可变弯度机翼
2.3.2 变厚度
变厚度机翼一方面可以改善升阻力系数,从而满足飞行器高低速的性能要求;另一方面,机翼厚度直接影响到层流—湍流的过渡位置,变厚度机翼可以将层流—湍流的过渡位置向机翼后缘移动,以扩大机翼表面的层流区域,从而获得显著的减阻效果,减少燃料的消耗。
图11 所示为一种可变厚度机翼,主要包括机翼下表面用来承受外力的刚体部件、安装在机翼表面的柔性蒙皮以及形状记忆合金作动器系统。变形机构由2个斜凸轮组成,将沿翼展方向的水平运动转化为垂直于弦的竖直运动[32]。Brailovski等[33]通过风洞实验测试发现,当迎角从-1°变化到2°过程中,变厚度机翼的平均阻力可以减小18.5%。此外,Popov 等[34]提出了一种单点控制机翼上表面的自适应机翼概念,柔性蒙皮处于层流—湍流的过渡位置,重点研究了层流—湍流过渡点在翼型上的位置控制。由于形状记忆合金具有非线性行为,有必要使用PID控制器、比例控制器和变量增益控制器去控制形状记忆合金和整个闭环,仿真结果验证了控制的有效性。

图11 可变厚度机翼
2.4 组合变形
组合变形是指上述变形方式之间的相互耦合。随着复合化蒙皮材料、智能驱动技术和柔性变形机构的发展,机翼的变形方式也不再单一,而是正在朝着多种变形组合的方向发展。更多的变形方式意味着飞行器可以适应更复杂的飞行环境,实时保持最优气动特性,高效地完成各种组合型任务。
Neal 等[35]设计了一种如图12 所示的变体飞行器,可同时实现变后掠角、变展长和机翼扭转。该模型采用2个旋转作动器和5个线性作动器来控制机翼形状。变后掠机构的驱动方式是电动,其他变形机构的驱动方式是气动的。机翼展长可以从17 英寸最大增加到24.5 英寸,增长44%,后掠角可以在0°~40°变化,机翼扭转角度可以控制在±20°之间。Vale等[36]为了提高小型无人机的性能,提出了一种变形机翼的设计方案,该变形机翼可以通过延长翼梁和伸缩翼肋达到同时改变展长、弦长以及翼型的目的,翼弦的变化范围是其下限值的1~1.5倍,翼展的变化范围是其下限值的1~1.4倍,而翼型厚度的变化范围是其下限值的1~1.8倍。然而,由于变形机制和气动载荷使蒙皮过度变形,导致变形机翼的性能不是很好,另外伺服电机、传动设备和其他元件会使机翼的重量大大增加。

图12 Neal设计的变体飞行器
3 结束语
变体飞行器正由简单刚性变形向智能柔性变形发展,变形方式也正在朝着多种变形组合的方向发展。飞行器可根据外界环境和任务需求自主柔性变形,获得最合适的气动外形,完成不同的飞行任务。另外近年来卫星通讯服务的爆炸式增长,使无人机成为许多常规应用的首选技术,如边境巡逻、环境监测、军事行动和搜索救援。由于无人机的研究需要的生产成本、空气动力学载荷、安全性和认证要求均较低,因此将变形机翼技术应用在无人机上,使无人机在军用和民用领域发挥更大用途,这将成为变形机翼新的研究热点。
不同的变形方式对飞行器的空气动力学性能影响不同,通过变形机翼技术可以使飞行器在多种环境下保持最优性能和效率。为实现超音速飞行,20世纪以变后掠机翼技术为代表的变形方式得到了快速发展,变展长机翼以及折叠机翼由于变形方式相对简单,发展已经相对成熟,正处于实用化阶段。变弦长、变上反角、变弯度等复杂的变形方式仍需进一步发展和完善,虽然当前关于各种复杂变形机翼已有大量研究,但在商用飞机上实现大尺度变形仍有待验证。随着复合化蒙皮材料、智能驱动技术和柔性变形机构等相关技术的发展,变形机翼技术将会发生革命性变化。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年6期)2021-07-20
西安航空学院学报(2020年5期)2020-12-08
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年8期)2017-12-20
北京航空航天大学学报(2017年10期)2017-04-20
邯郸职业技术学院学报(2016年2期)2016-02-27
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
航空学报(2015年4期)2015-05-07
振动、测试与诊断(2014年5期)2014-03-01
