
智能网联背景下汽车底盘线控子系统及其集成的综述
2021-03-05 14:03罗宁延
汽车实用技术 2021年4期
罗宁延
智能网联背景下汽车底盘线控子系统及其集成的综述
罗宁延
(西华大学,四川 成都 610039)
自动控制技术已经在现代汽车上得到了广泛应用,汽车电子控制技术的可靠性在不断提高,汽车线控技术在汽车关键系统的运用日益得到青睐。文章的写作是为了深入学习智能汽车线控系统,并为将来基于线控底盘的智能汽车上层控制技术准备基础知识。文章介绍了线控技术的应用必要性及其定义,并展开介绍该系统中主要的子系统及其关键技术,最后将对该领域内面临的主要关键问题做介绍。
线控系统;线控转向;线控制动;线控油门;线控换挡
前言
随着自动驾驶技术的兴起和发展,对整车线控系统的要求也不断提高,我们不仅要求功能实现,同时还对线控系统的系统功能安全性、使用环境可靠性等性能提出更高的诉求。
线控系统最早起源于飞机技术领域,又被称之为电传操纵技术[1]。主要是为了实现控制系统的信号化、自动化,通过引入控制器、传感器模块以及相应电信号传输线路将执行器、控制器联系起来,实现对功能模块的功能执行和反馈以及进一步的功能监控。
线控系统地引入对于原本的汽车而言主要有如下优点:1)优化原有机械机构,实现更加灵活的功能系统布置;2)使用电机作为执行器的线控系统整体上降低了系统质量,从而降低整车质量,有利于节能环保;3)采用线控系统的汽车更加易于进行二次开发,实现更多的定制化功能;4)由于具备电信号控制的执行机构,从而为自动驾驶系统的开发准备的基础。
1 底盘线控系统子系统
目前在智能汽车中组成线控系统的主要是四块子系统,油门(Accelerograph)、转向(Steering)、制动(Breaking)、换挡(Shift)。下面我们对这四个部分进行分别论述。
1.1 线控油门系统(Accelerating-by-wire)基本结构及其原理
线控油门技术,即电子节气门技术。主要的结构由加速踏板传感器、控制器、传递线路以及节气门执行器组成。线控油门系统的传感器主要包括加速踏板传感器、节气门开度传感器、车速传感器、氧传感器等,如图1所示。

图1 线控油门系统基本模块
由于传感器信号容易受到其他电子设备的影响,而发送错误信号给控制器。针对这一问题文献[2]提出一种支持机线控驱动的控制器单元的双冗余相互校验硬件电路架构,用于避免信号错误,并设计开发出能够对驾驶意图进行判断,实现故障诊断的安全监控策略。
1.2 线控转向系统(Steering-by-wire)基本结构及其原理
线控转向技术用于替换转向盘和转向车轮之间的机械结构。其主要组件由转向盘模块、转向机模块、整车传感器模块,其中转向盘模块包括:方向盘、转向盘传感器、路感电动机;转向机模块包括:转向机、转向机执行器;整车传感器模块包括:车速传感器、加速度传感器、横摆角传感器以及控制器,如图2所示。
具体的功能实现是通过转矩、转速传感器将驾驶员的转向指令转换为电信号输入控制器,控制器输出控制信号给执行器,执行器控制转向轮动作,完成转向操作。方向盘与转向轮之间通过控制信号连接;传动比可通过软件自由设定;便于和其他系统集成、统一协调控制[3]。线控转向系统主要由数字传感器、电子控制单元、实时软件、电子动力转向装置等组成[4]。

图2 线控转向系统基本组成模块
值得注意的是,控制器还会收集其他传感器的信号,识别路面状况,并将相应的信号反馈给方向盘模块,实现路感反馈。此外,线控油门类似,线控转向系统的电子控制单元也具有类似于纠错的功能,能够对驾驶员操作指令结合行车状态进行分析识别,判断是否应该执行操作动作。例如,在高速行驶工况下,驾驶员大角度转向动作将会被识别为误操作,不会被传递到转向执行器。
对于具备线控转向系统的车辆相比与传统车辆,除了已经提到的优点,还具有如下优点:
(1)由于使用电子控制器作为中间层,转向动作控制更加灵敏,操作稳定性更好;
(2)由于取消转向器与转向盘的直接连接,在路面平顺性欠佳的路面行驶时,操作舒适性显著提高;
当你把克什米尔蓝宝石用显微镜放大30-50倍,你会看到雪片状的内含物和乳白色的条带,也正是因为它们,克什米尔蓝宝石才会有独特的“天鹅绒”效应。
(3)由于采用电机作为执行机构,从而替代了原本油液动力传递介质,从而实现环保、节能。
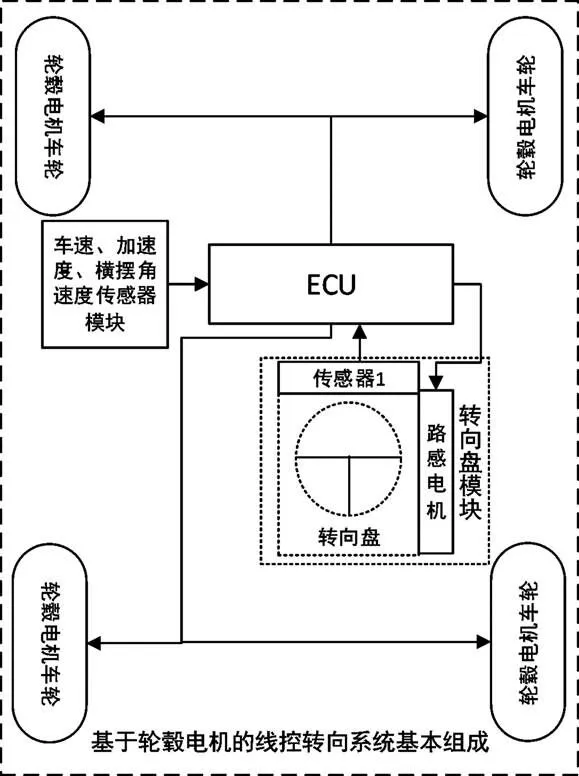
图3 具有四轮轮毂驱动的线控转向系统底盘结构
关于线控转向系统,由于轮毂电机技术的改善,如2018年,舍弗勒公司发布The Schaefller Mover系统,该技术已经接近成熟,满足整车需求,转向轴心位于轮辋内部,车轮转向包络与传统转向方案基本一致。该方案匹配的轮毂电机可以实现 24kW,500N∙m的轮端性能[5]。因此越来越多的研究者开始考虑将转向机构集成仅轮毂电机模块,从而实现更加灵活的转向功能。其基本部件包括轮毂电机车轮、转向盘模块、控制器、整车传感器模块。其基本结构如图3所示。
该技术的应用将在很大程度上让出底盘空间,使沉重的电池布置在地板下,车辆重心降低,行驶稳定性提升;而由于集成轮毂电机的全新轮边转向取消了转向器,使得多种特殊的转向模式成为可能,包括快速换道、侧方停车、小半径转弯和原地掉头。
1.3 线控制动系统(Braking-by-wire)基本结构及其原理
制动系统是保证汽车安全行驶最重要的一项主动安全系统,是通过制动器与车轮的摩擦使行驶中的汽车按照驾驶员的意愿进行强制减速甚至停车,使汽车下坡行驶时保持速度稳定,以及在各种道路条件下停驶的汽车保持稳定不动的专门装置[6]。
对于线控转向系统的基本组成,如图4所示,主要由制动踏板、制动踏板行程传感器、控制器(ECU)、制动执行器、车速传感器以及相应的信号传输线路组成。其中制动踏板传感器将驾驶员对制动踏板的操作转换为电信号传输给控制器,控制器则将包括制动踏板传感器信号、车速传感器信号在内的各类信号进行运算,判断是不是正常的操作信号,避免驾驶员误操作,如果经预设程序判断为正常输入,则进一步传输到执行器进行制动。
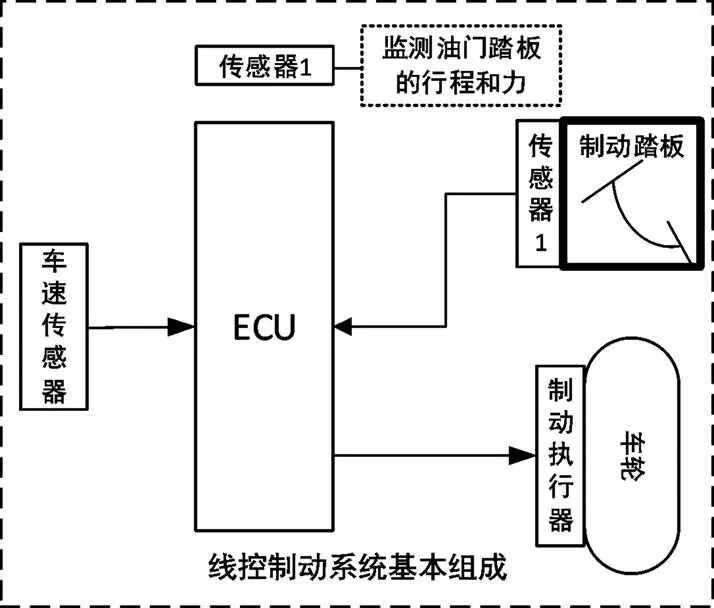
图4 线控制动系统基本组成模块
应用线控制动系统的优点如下:(1)系统结构简单,省去大量管路系统及部件;(2)制动响应时间短,提高了制动性能;(3)系统制造、装配、测试简单快捷,采用模块化结构,维护简单;(4)采用电线连接,系统耐久性能良好;(5)易于改进,略加变化即可增设各种电控制功能。
关于线控转向系统的相应精确性,目前有文献[7]研究了空心电机直驱主缸方案:电机直驱供压单元、高压蓄能器供压单元、电磁阀、制动轮缸、制动踏板,该研究实现了“快速建压,精确控压”的性能需求。
另外对于EV,独立对四个车轮的线控制动系统的控制策略,也是目前的研究热点,该方向的研究将有利于实现更高的行驶稳定性以及控制由于地面摩擦性质导致的突发事故。
1.4 线控换挡系统(Shifting-by-wire)基本结构及其原理
近年来,为了使搭载自动变速器(Automatic Transmis -sion,AT)的车型能实现全自动泊车功能,需要将传统的通过搬动换挡杆带动拉索拉动变速器换挡轴来实现P、R、N、D 的换挡方式,改为用电驱动直接驱动换挡轴的方式来实现换挡,该电驱动机构被称为线控换挡执行机构[8-9]。该技术的应用同时也是高级辅助驾驶技术应用于自动挡汽车的关键技术支撑,包括自动变速行驶、自动P挡请求、实现手动/运动换挡模式、驾驶员安全带保护、车门打开安全保护、实现整车防盗功能、多重硬线唤醒、驾驶习惯学习等等功能。
线控换挡系统的基本模块包括:控制器、电子档位选择模块、发动机与变速器模块、换挡执行器模块以及整车信号模块。电子换挡选择模块将档位信号发送给控制器,控制器再结合整车信号判断是否处于可以操作的状态,确认没有隐患则向换挡执行器发送相应的换挡信号,执行器则进行换挡操作,同时将换挡切换信息显示到仪表盘,从而完成原机械换挡操作以及动作反馈;如果存在隐患则将隐患信息发送到仪表盘,提醒驾驶员采取相应的措施。
关于采取线控转向技术的优势,主要有:1)电子换挡选择器相比原有的换挡器质量更轻,体积更小,同时也易于维护;2)采取线控换挡技术能够减少换挡安全性,提高功能可靠性。
2 底盘线控系统
前面我们已经阐述了线控系统的主要子系统,我们需要注意到,目前智能汽车线控系统往往是前面提及的几大子系统的有机整合。由于子系统到整个系统并不是单纯的装配到统一,而是相互融合地形成一套具有高度一致性、高度统一性的复杂系统。因而这里我们有必要在从整个线控系统层面讨论该系统的集成现状和前沿技术。
2.1 底盘线控子系统集成
我们已经知道了线控子系统的基本构成,现在我们把子系统集成为相应的模块,并集成为一个比较完成的车辆线控系统,该系统的简要结构如图5所示。
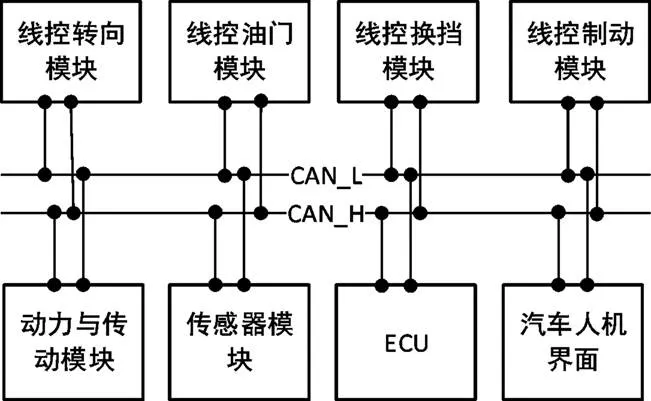
图5 底盘线控系统集成于CAN总线
在集成的线控系统中,所有的相关传感器信号被集成到传感器模块中,并接入总线;控制器同样被接入总线中用于接收传感器模块和各个线控系统传来的信号,并发布对各个线控子系统的控制信号,同时也向人机界面发布反馈信息,用于与车内人员的交互。
2.2 线控系统的前沿研究
对于应用于整个线控系统的前沿技术,我们这里仅仅对比较重大的前沿研究进行阐述。
2.2.1车用42 V电源系统的开发
目前线控系统的执行器主要是有大功率电动机或者大功率伺服电机作为主体。这样执行器的功率消耗原高于原有的执行器。例如一个转向电动机功率为550~800W,而电机盘式制动器的功率大约为1000W[10]。对于这样的功率消耗,目前的12V汽车电源系统很难满足,因而有必要对现有的电源系统进行必要的升级[11-12]。而采用42V电源系统则能够较好满足线控系统的用电要求,有利于适宜电动执行器的集成使用。当然,另一方面,车辆电源电压的升高后也将会带来相应的问题,例如电弧放电、电磁噪声、绝缘和耐蚀性等一系列技术和安全问题,这些问题值得我们进一步研究。
2.2.2功能安全标准(ISO 26262)的应用
随着电子技术的不断发展,汽车系统电子系统在整个系统中的占比不断加大,在使整个系统更加智能化的同时,也将整个车辆系统的复杂性提高到空前的高度。而电子系统是目前车辆系统的核心,在可靠性层面,电子系统的可靠性相比于机械系统要低,因而如何设计出具有高可靠性的电子系统,从而保证核心电子系统的功能安全是亟须我们考虑的[13]。目前,欧美厂商已经在广泛采用功能安全标准ISO 26262进行相关电子系统的硬件、软件的开发[14]。
而对于已经具备初步设计的系统,我们根据ISO 26262可以引入了相关的“冗余技术”以及“故障诊断”技术提高系统的安全可靠性[15-16]。特别是冗余技术,即容错。传感器冗余、执行器冗余等将在很大程度上提高线控系统的运行可靠性[17]。

图6 具有冗余设计的线控油门系统
容错控制技术方法包括硬件冗余方法和解析冗余方法两种[4]。硬件冗余是通过对功能进行备份,例如使用双传感器的线控油门系统,从而实现功能安全指标的提高,如图6。冗余设计也是容错控制的基础,继续沿用前面的举例,具有双传感器的线控油门系统可以根据信号的差异,通过控制器诊断系统是否出现故障。而解析冗余方法主要是通过对控制器的软件设计提高整个系统的功能冗余,从将整个系统的容错性能进行提升。
3 结语
线控技术实现了高精度的电子控制,是实现高级辅助驾驶以及自动驾驶研发至关重要的基础。因而如何使该技术性能更好是我们需要考虑的,同时如何在改进技术的同时提高其技术的可靠性也是非常重要的,特别是结合相关功能安全标准、稳定的硬软件开发规范进行相应的开发,从而开发出具有市场竞争力的线控系统,为构建稳定的上层软件系统奠定基石。
[1] 王政军,李星,李源清,等.汽车线控技术的研究现状及展望[J].科技创新导报,2015,12(21):8-9.
[2] 熊建,顾宏.发动机线控驱动技术的功能安全设计与研究[J].摩托车技术, 2019,No.333(11):36-43.
[3] 李华宁,陈小龙.汽车电子应用中的线控技术[J].苏州市职业大学学报,2009,20(3):54-57.
[4] 于蕾艳,吴宝贵,伊剑波.汽车线控转向系统转向控制研究[J].江苏大学学报(自然科学版),2014, 35(3):267-273.
[5] 曹洋,苍衍.电动汽车底盘技术的颠覆式创新[J].汽车文摘,2019, No.527(12):13-19.
[6] 蒋鸣雷.新能源汽车制动系统的发展趋势[J].汽车实用技术,2019, No.298(19):16-17, 42.
[7] 谷贺冲.乘用车电机直驱线控制动系统设计与控制研究[D].吉林大学,2019.
[8] 高智,钟再敏,孙泽昌.电动AMT选换挡电机执行机构位置最优控制[J].汽车工程, 2011, 33(2): 133-137.
[9] 孙冬野,刘俊龙,叶明,等.机电控制CVT电控电动执行机构参数设计方法[J].中国公路学报, 2019, 32(1):182-190.
[10] 罗锦锋.基于汽车智能化的高新技术研究[J].汽车实用技术,2019, No.296(17):163-165.
[11] 李俄收,吴文民,李玉英.未来42V汽车电气系统综述[J].汽车电器, 2004,卷缺失(4):4-7.
[12] 李理光.国际汽车电子技术发展新动态——42V汽车供电系统[J].汽车技术, 2001,卷缺失(2): 5-8.
[13] 佚名.符合ISO 26262国际汽车安全标准的EPS[J].汽车零部件, 2015, No.83(5):12.
[14] 芦文峰.满足ISO26262标准的EV整车控制单元开发研究[D].西华大学,2018.
[15] 郭辉,刘佳熙,于世涛,等.符合ISO 26262的汽车电子功能安全解决方案[J].上海汽车, 2015, No.295(3):47-50.
[16] 刘佳熙,郭辉,李君.汽车电子电气系统的功能安全标准ISO26262 [J].上海汽车,2011, No.254(10):57-61.
[17] 罗来军,李伟超,高大威,等.线控转向系统软硬件容错研究综述[J].汽车零部件, 2019, No.134(8):83-89.
Overview of Wire Control Subsystem and Integration of vehicle under the Background of Intelligent Network
Luo Ningyan
( Xihua University, Sichuan Chengdu 610039 )
Automatic control technology has been widely used in modern automobiles, the reliability of automotive electronic control technology is constantly improving, and the application of automotive wire control technology in automotive key systems is increasingly favored. The writing of this article is a preparation to study the wire control system of smart car and set the solid basic foundation for the autonomous system which based on the wire control chassis in the future. This article will introduce the necessities and definitions of the wire control system, and also give the main subsystems and key advances in this field. Finally, the main key problems in this field will be introduced.
Wire Control System; Acceleration-By-Wire; Braking-By-Wire; Shifting-By-Wire; Braking-By-Wire
10.16638/j.cnki.1671-7988.2021.04.005
U463.672
A
1671-7988(2021)04-14-04
U463.62
A
1671-7988(2021)04-14-04
罗宁延,就读于西华大学。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
机械科学与技术(2022年2期)2022-03-30
汽车之友(2021年23期)2021-12-24
科技风(2021年10期)2021-04-18
网络空间安全(2019年8期)2019-03-18
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
企业技术开发·中旬刊(2014年7期)2014-09-23
