单/双协同模式下配电网故障排查的最优巡线规划
2021-03-05 03:48苏学能高艺文李世龙
四川电力技术 2021年1期
苏学能, 张 华, 龙 呈, 高艺文, 李世龙
(国网四川省电力公司电力科学研究院,四川 成都 610041)
0 引 言
长期以来,电力规划与建设存在“重发输、轻配用”的问题,使配电网的发展相对滞后。目前,配电网仍面临以下问题:1)供电半径长,线损高;2)网络结构不合理,运行方式不够灵活;3)负荷增长迅猛、电网建设用地紧张[1]。鉴于此,配电网发生故障的可能性通常难以规避。目前,虽可结合配电自动化进行故障定位,但限于如投资成本以及配电网大部分线路尚未全面进行自动化升级改造等原因,当下更精准的故障排查仍多以人工巡线为主,而无优化调整的巡线排查往往效率欠佳。因此,在配电网抢修的指挥决策应变上,如何有效制定出最科学、高效的故障排查策略及优化任务的分配,具有重要的理论价值和现实意义[2-3]。
配电网故障处理主要分为故障定位、故障隔离和恢复供电3个阶段[4],因此当下国内外相关研究也多集中于故障定位与诊断[5-6]、基于断路器操作的故障恢复与重构[7-8]以及抢修路径的优化[9-10]等相关方面。关于故障定位研究,成果较为丰硕,主要集中于以下三方面:1)故障定位的模型构建及求解,如文献[11]结合故障信息矩阵和网络描述矩阵,获取能用于判断和隔离故障区段的故障判断矩阵。文献[12]考虑了配电网闭环运行的工况,进一步提出能适应环网闭环运行和多电源模式下的多重故障定位算法。2)故障定位优化模型的准确及鲁棒性能提升。文献[13-15]从优化的视角刻画故障定位问题以建立优化模型,并采用如蚁群算法、遗传算法和仿生磁学等算法进行求解。3)非健全信息下的容错故障定位。由于配电设备主要工作在户外,工况较为恶劣,易发生漏报或者错报故障的情况。因此,也有部分研究热衷于解决非健全信息下的容错故障定位,如粗糙集和贝叶斯等算法[16-17]。
上述故障定位研究多集中于研究如何实现故障区段定位建模合理化,进而保证故障定位的快速、准确,但以上目标良好实现的前提均依托于配电自动化终端的完善配置。但限于如投资成本、线路众多等原因,配电网仍有少部分线路尚未进行自动化升级改造;此外,即使对于已改造的线路,配电自动化终端有效覆盖率依然较低,故当下更精准的故障定位最终仍以人工巡线排查为主。因此,基于各类终端完善化作为前提的现有研究则稍显过于靠前,但随着泛在电力物联网的层级部署、逐步推进,当下相关研究将存在落地发展的可能。因此,限于现有条件,目前更需要一种高效的过渡方案,即针对配电网仍存在未改造的线路或者配电自动化终端覆盖较低的线路,精准故障定位仍需借助人工巡线模式。然而,针对人工巡线的研究,目前多局限于单人或小队进行巡线作业,而相对更为高效、契合现场工况的双协同模式下的故障排查巡线规划方案的设计,鲜有研究。
鉴于上述分析,从理论角度解析巡线最优模型的存在性,以期为建立实用高效的故障排查巡线模型提供导向指引。首先,结合配电网辐射状特点,构建了单模式下故障排查的最优巡线模型,并从理论上证明了其计算复杂度;其次,为设计符合实际作业的高效方案,进一步构建了双协同模式下高效最优排查巡线模型;最后,论述了两个模型的求解差异和具体流程,并以IEEE 33-Bus和某实际系统为例,验证所提巡线排查最优模型的准确性和有效性。
1 单/双协同模式下配电网故障的最优巡线排查模型
为助于故障精准定位、抢修路径优化和供电有效恢复,快速准确的故障排查则显得尤为重要。因此,从单/双协同模式角度构建巡线排查最优模型,为现场应用提供合理有序的排查导向。
1.1 单模式下故障巡线排查最优模型
中压配电网通常以闭环设计、开环运行,即现场多为单电源带馈线的辐射状网架结构,如图1所示。图1中,S1为电源;H1和H2分别为联络开关,正常运行时为分断状态,转供负荷等其他条件时,两个联络开关H1和H2则处于闭合状态,体现了闭环设计、开环运行的设计理念;编号1—16为分段开关;L1—L6为负荷节点供电。
进一步,抽离H1/H2等联络设备后,图1可简化为如图2的网络结构。
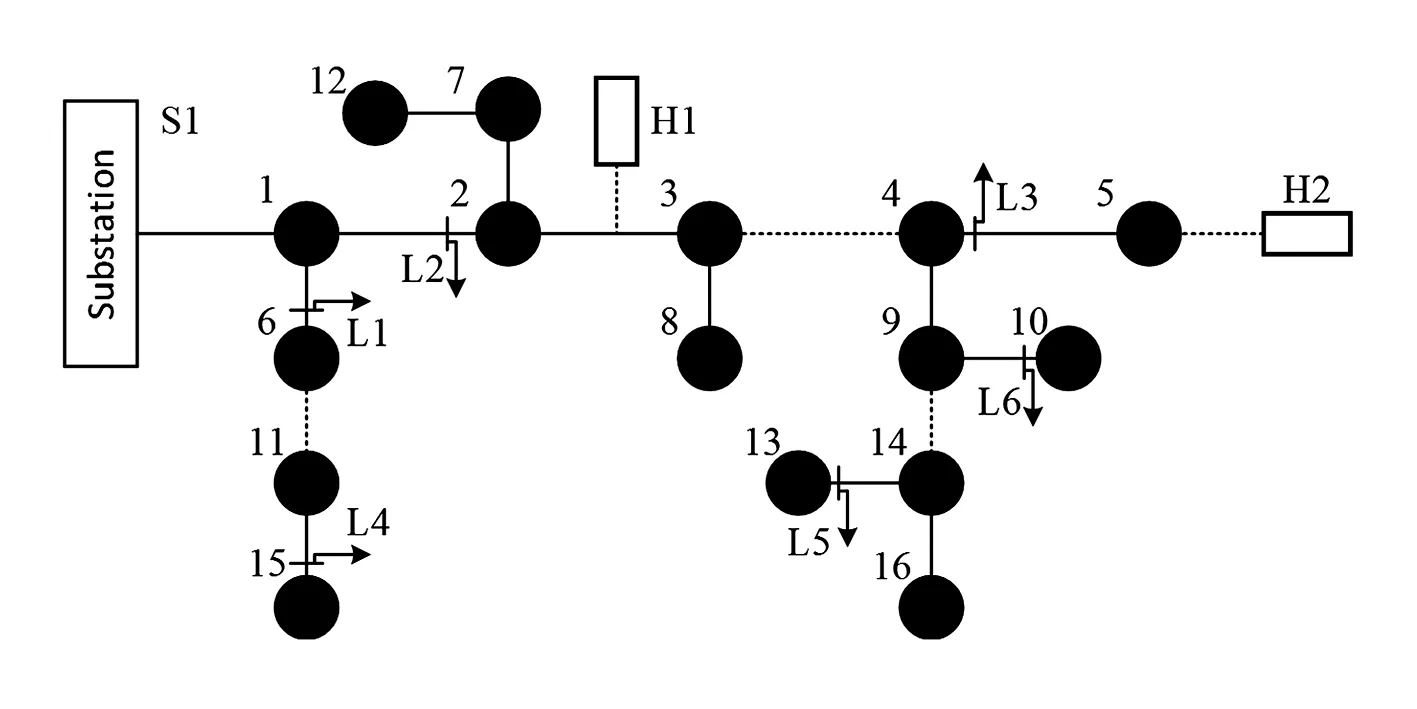
图1 辐射状配电网

图2 简化辐射状配电网
图2中定义每条线路路径参数为Li,j,且i和j分别对应该线路首尾相连的分段开关。若从主干分支角度划分图2,其可划分为Area 2—Area 5及由剩余部分所组成的区域Area 1。
考虑到现场站点对彼此之间路径存在部分不可达或距离任意性,且现场多以实际线路为巡查对象,因此不作特殊说明,后续模型构建与数值分析均假定巡线路径为待巡查线路。基于此,单小队巡线模式下,考虑主干分支将仅排查一次,而不同于主干分支的剩余子分支,排查次数将为两次。当然,含有多分叉的各子分支亦可按照类似于此方式的递归排查。此外,子分支辨识可以采用深度优先搜索算法(depth-first search algorithm,DFS)。在此基础上,故障排查巡线数学模型的构建将比较直观,如式(1)所示。
lm+2∑i∈Ωbli
(1)
式中:lm为主干支的路径长度;li为第i个子分支的总路径长度; Ωb为子分支区域集合,如图2中Area 2—Area 5。
若定义图2各分支集合总长度为ls,则式(1)可改写为lm+2(ls-lm),亦即2ls-lm。结合故障巡线排查最佳的设想,则目标函数F可被定义为
F=min(2ls-lm)
(2)
式中,可调整参数显然仅为lm,因此F最佳显然为lm最大,即主干分支总长度最长。若从数学对偶的角度,最大寻优亦即搜寻最小的目标,故式(2)可进一步改写为
F=maxlm
(3)
相比式(2),目标函数式(3)更为简洁直观。简化后寻优模型,应用于小规模配电网时甚至可直接给出最佳排查巡线路径,且相比智能算法获取的排查路径,效果亦更加稳定。如对于图2,若可确定主干分支为集合Ωm={l01,l12,l23,l34,l45},则lm=∑i∈ΩmΩi。此时,显然单小队模式下的故障排查巡线路径最佳结果为2ls-lm。因此,上述问题将被转变为节点对之间最长路径的确定。
实际上,图论领域有关路径搜索算法,如Floyd、Bellman-Ford和Dijkstra等[18],多倾向于研究网络最短路径。为便于结合图论最短路径算法,式(3)对应的目标函数可转变为
F=min(-lm)
(4)
式(4)含义则为将网络各分支长度均取负的前提下,数学中最大问题可对偶成最小寻优的问题。在此基础上,式(4)寻优则是无向负权网络中寻找节点对最短路径问题。对于此问题,显然可以采取Dijkstra算法进行求解。相应地,此模型计算复杂度将为Ο(N2),N为节点总数。值得注意,目标函数从式(1)转换为式(4)均是基于网络划分子区域后逐步简化而得,因此最终计算各交叉子分支li时需要以相同转换思路递归类似求解。
1.2 双协同模式下故障巡线排查最优模型
科学高效的故障排查策略及任务分配的优化,有助于抢修决策的辅助、供电质量的提升和经济效益的增强。因此,如何在单小队模式的基础上,进一步衍生更符合现场作业特点的双协同故障排查巡线模型,明显更具研究价值。不同于前者,双小队协同模式排查作业的目标,应能同时兼顾总排查路径最短和队间差异最小。总路径最短显然是多作业模式下排查效率提升的综合结果,而后者则是均衡队伍彼此间的分配任务量,即为出于“短板原理”的权衡与考量。
为便于排查的连续性,双协同排查任务的分配需保证子任务路径的连通性。为满足此条件,此处将引入图论图切割方式,并通过各节点的节点度di≥2作为划分标准,而不择取di=1的节点。原因在于其为末端节点,划分实质等价于未有效切割完整网络。
以图3拓朴切割示意图为例,di≥2的节点仅有节点2(即di=3),而其切割方式则对应有3种。切割后的图3(b)至图3(d)中右半部分的节点2均依顺序编号方式调整为6,以便于后续描述。在此基础上,划分后的两连通子图则可采用第1.1小节所构建的单小队排查巡线模型,获取各自巡线目标函数,即F1=min(-lm,t1)和F2=min(-lm,t2),其中lm,t1和lm,t2分别为两个子任务下子图主干分支路径长度。依据F1和F2,并结合各子图子分支lm和ln,且m∈Ωb1,n∈Ωb2,Ωb1和Ωb2分别为两子图子分支集合,则可进一步采用式(1)获取各子任务的最佳巡线路径长度,分别定义为F3和F4。

图3 拓扑切割
通过F3和F4,可构造出协同模式所需的双目标函数,具体为
(5)
式中,F3和F4分别为双协同模式下,排查路径总长度最小和队间任务分配量最均衡。
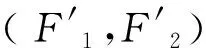
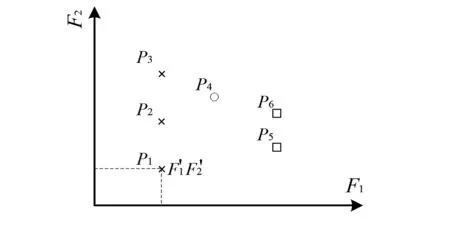
图4 类Pareto前沿
2 适应多模式下故障巡线模型的求解流程
单/双协同模式下故障排查巡线模型之间差异,主要在于现场人员参与和资源调配的不同。考虑双协同模式,既是对传统排查巡线模式的延伸,亦是对复杂工况的高效适应。但正如第1.2节所讨论,双协同模式的排查作业最终可转化为单小队排查的两次调用,只是输入子图信息不同。
为兼容两种模式,融合两种故障巡线排查模型求解流程后的步骤如下所示:
1)输入配电网拓扑相邻信息,形成邻接矩阵K、节点参数集合H、线路长度集合L,并逐一将长度取负和单/双协同模式标识Flag。
2)若Flag=0,则执行步骤3;反之,转至步骤6。
3)依据K和L,以Dijkstra获取节点对最短路径,并将该链表记作lm,即主干分支。
4)结合lm,获取di≥2的节点,记作集合N1后遍历其各成员m∈N1,并进行如下操作:
(1)孤立节点m:即∀p∈lm,令Km,p=Kp,m=0;
(2)分支辨识:根据孤立节点中K,计算节点m节点度后,以DFS辨识m所含子分支,记作集合Ωb。
5)结合lm、Ωb、m∈N1和L,利用式(1)计算故障排查路径最佳长度后结束。
6)据H获取di≥2的节点,记作集合N2后遍历其各成员n∈N2,并进行如下操作:
(1)以类似于图3的组合方式,从节点n将原始拓扑拆分为两子图,记作G={G1,G2};
(2)对G成员,分别执行步骤3至步骤5;
(3)据式(5)分别获取与n对应的多种排查方案,记作Fn={(F5,n1,F6,n1),…(F5,nk,F6,nk)},其中k表征节点n撕裂方案索引。
7)汇总步骤6所得方案为Fn,n∈N2后,据此构建类Pareto曲线,从中择取巡线最佳方案后结束程序。
3 算例仿真
为便于阐述所述方案,修改后的IEEE 33-Bus系统将首先作为示例。该系统网络结构及线路参数分别如图5和表1所示。值得注意,此处修正后的IEEE 33-Bus系统为依据配置在作为与其他馈线段联络的边界节点S1、18、22和25处的各类配电自动化终端,抽离出的待进一步巡线排查的完整故障区段。依据第1章,可对修正的IEEE 33-Bus系统分别构建单/双协同模式的故障巡线排查模型。
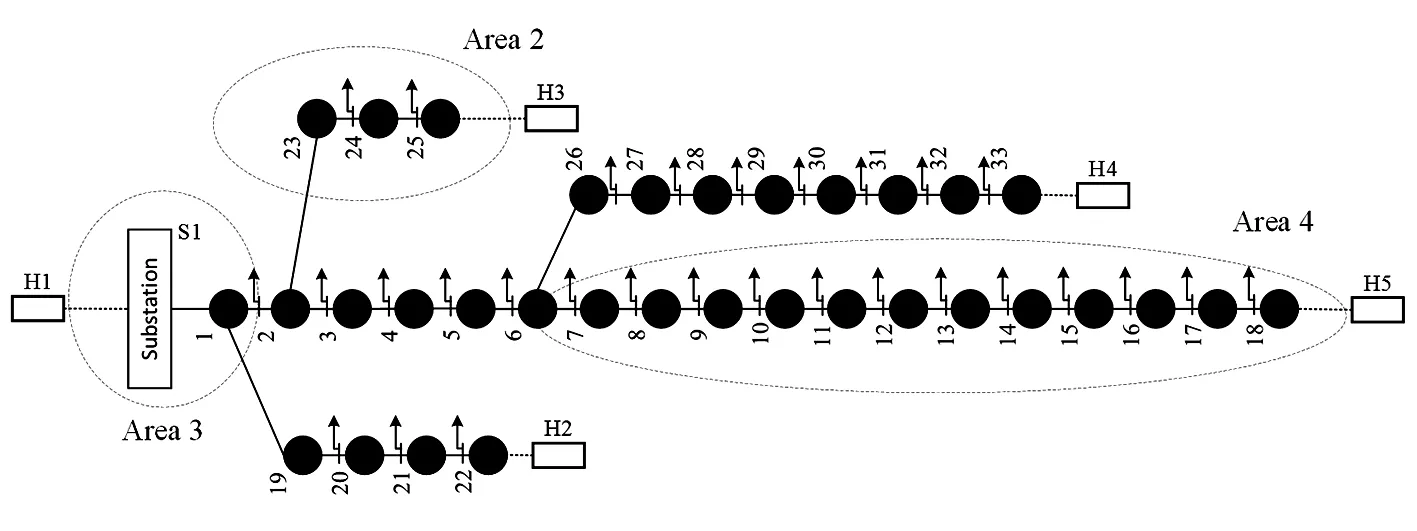
图5 修正后IEEE 33-Bus简化系统
出于对比基准考量,单小队作业排查模型将被优先分析。在根据第1章方法对表1中线路长度取负后,结合Dijkstra可辨识该系统最短路径,即最大主干链表lm由三部分所构成,分别为{1,2,3,4,5,6}、{1,19,20,21,22}和{6,26,27,28,29,30,31,32,33},即除Area 2—Area 4外剩余部分组成。进一步,由lm和DFS算法,可识别出该系统子分支集合Ωb,规模共计三部分,分别对应图5中Area 2—Area 4。由lm、Ωb和目标函数式(1),可得知巡线排查最佳路径为沿lm排查一次,每逢交叉点顺子分支,即Ωb成员排查两次,而最终巡线排查总长度lm+2∑i∈Ωbli则为110.68 km。

表1 IEEE 33-Bus系统线路参数
为兼顾排查路径总长度最小和队间任务分配量最均衡,采用第1章所提方法构建关于图5相一致的双协同模式排查巡线模型。依据该模型,可以绘制其巡线模型寻优结果的类Pareto曲线,如图6所示。由图6可得知,排查方案Fn共有35种结果。仅以F5和F6单一目标而论,最佳排查路径总长度及最小长度差异分别为101.14 km和3.86 km,但是两个目标最优并不全都体现于同一方案。换言之,同时兼顾优化两目标至101.14 km和3.86 km的最佳方案数量仅有一个,且两个子任务巡查路径总长度分别为48.64 km和52.50 km。为验证方案的有效性,此处也将给出F5和F6寻优空间的上下限,分别为[101.14,110.68]和[3.86,108.28],显然所提双协同模式故障排查巡线模型最佳。

图6 类Pareto前沿
为便于理解,其任务分配方案如图7所示。即子任务2负责Area 2,剩余部分即为子任务1。协同划分两个子任务排查路径集合分别为:
图7 协同作业分配
1)子任务1
主链表lm:{1,19,20,21,22}。
节点1-18所构成集合,子分支:分支1为{1,34};分支2为{2,23,24,25}。
2)子任务2
仅有主链表lm:{6,26,27,28,29,30,31,32,33}。
对比单小队作业模式,任务量将被优化减少了近8.62%,即9.54 km,由此说明双协同作业模式除了有助于满足预想的多队并行模式提升排查效率,也可在适宜站点进行任务的切割分配时,有利于削减整体的巡线任务量。
进一步,以四川某地区实际系统为例,验证所提单/双协同模式下故障排查巡线理论最优模型的有效性。该系统节点总数为55个,包含熔断器、分支线和馈线段多个断路器和设备。应用所提方法可得到如表2所示的3种方案。

表2 某实际系统双小队巡线方案 单位:km
结合表2可知,仅考虑巡线路径总长度最短时,方案1和方案3为最终优选方案;反之,若仅侧重于小队巡线差异最短时,最佳方案为方案2,小队巡线差异仅差别6 km。若需同时兼顾目标F5和F6,则方案1和方案3将是最终的巡线方案,巡线总长度为88 km,可提升最终的巡线效率。
4 结 语
上面提出了一种单/双协同模式下故障排查巡线规划理论最优模型,并对算例进行了仿真验证。
1)相比基于智能算法排查作业模式,所提单模式巡线模型更趋于解析解,不存在收敛发散或不一致的问题,且巡线效果更优。
2)在单模式下衍生的双协同故障排查巡线模型,在满足双队协同总排查任务量最小的同时,亦兼顾队间分配任务量的最佳均衡,可助于提升巡线排查故障的作业效率。
所开展的工作,均是以配电网辐射状运行为基础,即所提单/双协同模式下故障排查巡线规划理论模型均是依赖于配电网自身呈辐射状供电运行方式的特点。而实际输电线路也存在着巡线巡检的排查效率问题,且其采用不同于低压配电网的网状运行方式。此外,输电线路巡线巡检也面临着分布点广、地形复杂和冰灾、水灾等自然灾害等诸多困难,依赖于人工排查的传统方式,存在着成本高、困难大、风险大等问题。而目前电力无人机电力巡线将为此提供一种高效替代方案,因此后续将无人机巡线方案的设计作为研究重点,以期为其高效排查提供导向指引。
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
智慧电力(2022年1期)2022-03-02
计算机系统应用(2021年10期)2022-01-06
建材发展导向(2021年18期)2021-11-05
科技研究·理论版(2021年4期)2021-09-10
电子制作(2019年20期)2019-12-04
妈妈宝宝(2019年10期)2019-10-26
学生天地(2019年28期)2019-08-25
源流(2018年6期)2018-12-03
无人机(2018年1期)2018-07-05