点云剖面特征描述的路面坑槽提取方法
2021-03-06 06:32畅陈豪刘如飞柴永宁王风春
地理空间信息 2021年2期
畅陈豪,刘如飞*,柴永宁,王风春
(1.山东科技大学测绘科学与工程学院,山东 青岛 266590;2.齐鲁交通信息集团有限公司,山东 济南 250101)
随着城市建设进程的加快,早期公路已不能满足城市的需要,部分路面出现了多种不同程度的问题,路面养护工作已经越来越重要[1-2]。路面坑槽是在行车荷载和雨水等自然因素作用下,路面骨料局部脱落而产生的坑洼。如果不能及时发现,就会严重影响道路的寿命与使用功能,因此研究一种高效准确的自动化路面坑槽检测技术具有越来越重要的意义[3-4]。
目前传统目视法的道路坑槽检测影响公路正常行驶,成本高,耗费大量的人力、物力[5-6]。因此,国内外学者致力于开发一种自动化的坑槽检测方法,并且有了较大的进展。现有的方法大致可以分为三类:一是基于二维图像的方法,该方法利用坑槽与正常路面的灰度差异区分出潜在的路面坑槽,再根据图像的纹理信息、面积形状信息[7-8]或潜在病害区域与背景区域的相似性和标准差最终检测出是否存在坑槽[9-10]。这类方法能够提取出潜在的坑槽并且根据图像的其他信息进一步确认,但是图像容易受到光照、水渍、道路其他病害等的影响,这将严重影响坑槽识别的精度与准确性,并且这种方法也无法获取坑槽的面积、深度以及位置信息。二是三维重建的方法,该类方法采用立体相机获取路面的视差值,再通过表面拟合实现三维重构,进而得到路面坑槽[11-12]。该方法易受不规则纹理和颜色的影响,具有不稳定性,不能广泛适应复杂路面的坑槽提取。三是基于三维激光技术的方法,利用点云的高程信息计算标准轮廓和测量断面的差异区分出疑似损坏数据二值图像,再进行变形损坏定位和分类[13-14],或者利用点云的高程和强度信息构建病害的特征提取坑槽[15]。这类方法可以克服路面阴影、光照不均、油污等环境因素的干扰,具有较强的适应性,并且可以获得坑槽的位置,面积和深度等信息。但是此类方法受病害区域深度和面积的影响,使轻微病害生成的深度图效果不佳导致识别效果不好,或者是受点云密度的影响构建的病害特征不适用于中轻度病害。
针对三维点云识别坑槽对轻微变形的识别效果不好的问题,本文结合特征点提取的原理,将道路剖面上的坑槽特征点提取出来并对提取点云的轮廓进行分析,能够获得较好的坑槽识别效果,识别结果可为养护单位判别路面损害程度提供依据。
1 坑槽提取算法
以车载三维激光点云数据为基础,结合特征点提取的原理,将道路剖面上的坑槽特征点提取出来并进行特征描述,再将提取出来的点云轮廓进行分析识别出坑槽。提取算法流程如图1 所示。
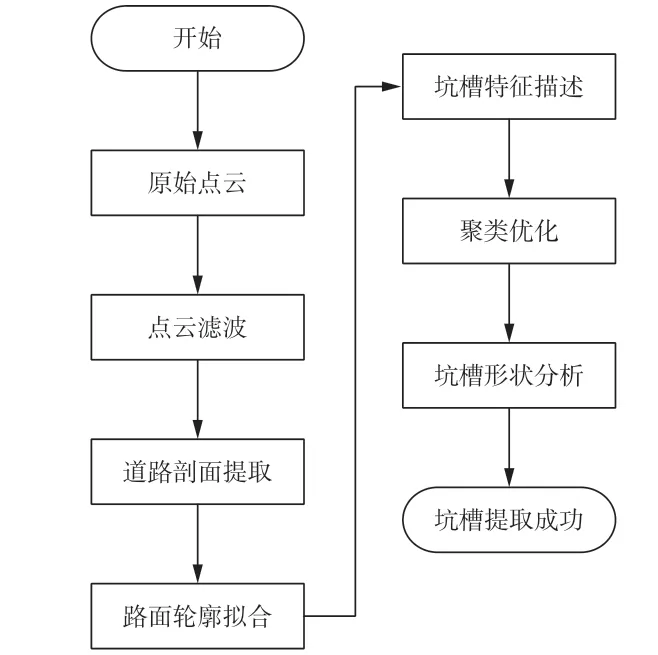
图1 坑槽提取算法流程图
1.1 路面点云滤波
原始的激光点云中不仅包括路面信息,还包括车辆、行道树等非路面信息。在对路面点云处理前需要进行滤波,去除非路面点云的影响。本文采用文献[16]的方法进行滤波,消除非路面噪声,保留路面点云。
1.2 道路剖面提取
由于点云的数据量较大,将路面点云进行分块处理,沿道路行车方向每隔10 m 对点云进行分块。因为路面坑槽的形状是不规则的,在坑槽比较窄的边缘位置进行单个方向剖面提取出来的坑槽点不能完整地表示实际坑槽的形状,分别建立横向和纵向剖面进行坑槽提取。车载扫描系统可以获取点云的扫描线信息,以每一条扫描线作为道路的横向剖面,以垂直于扫描线方向每隔一定距离的点云作为纵向剖面,设置纵向剖面距离分割阈值为D。
1.3 剖面轮廓拟合
道路剖面拟合采用道格拉斯-普克算法的原理。首先连接道路剖面上首尾两个端点AB,在剖面上找出距离直线AB 最大的一点S,然后判断S 到直线AB 的距离是否大于设定的阈值d。如果此距离大于或等于设定的阈值,分别连接AS 和BS,将剖面分成两部分处理,重复上述步骤,直到每个点到直线距离小于设定的阈值。如果此距离小于设定的阈值,则认为该剖面上不存在坑槽点。此过程如图2 所示。将这些折线上的节点定义为疑似坑槽特征点,从左到右以每两个节点间的点云进行最小二乘拟合,拟合出来的分段曲线即为路面剖面轮廓。
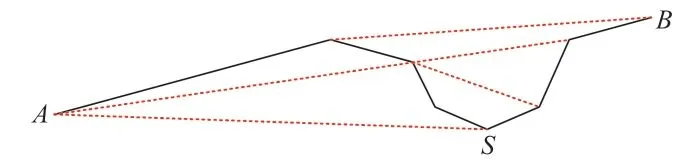
图2 路面轮廓拟合过程示意图
1.4 坑槽特征描述
1.4.1 坑槽特征点的积分不变量
Manay等[17]在文献中首次提出积分不变量的概念,此算子可以用来提取特殊形状的特征点,并且相对于曲率与法向量等特征点提取方法,积分不变量在进行特征点提取时受周围噪声影响较小,因此本文将此算子应用于坑槽剖面的特征点提取。
对于剖面拟合的路面轮廓上任意一点p,其积分不变量定义为:

式中,R2为以p 点为圆心;r 为半径的圆形;g(x)是与路面轮廓有关的常数函数,如果以疑似坑槽特征点p为圆心的圆形的某一点在路面轮廓上边,则取g(x)为1,否则取为0。
对于剖面上的点p 计算积分不变量的值B(p)为图3 中阴影部分与整个圆的面积之比。如果p 点为非坑槽点,阴影部分的面积为整个圆形面积的一半,B(p)的值接近于0.5;如果p 点为坑槽边缘点,这个位置在形态上是凸形,阴影部分面积大于圆形面积的一半,B(p)的值大于0.5;如果p 点为坑槽边缘底部的点,这个位置在形态上是凹形,阴影部分面积小于圆形面积的一半,B(p)的值小于0.5。
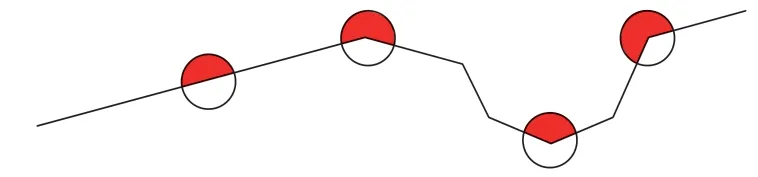
图3 积分不变量
1.4.2 坑槽部分的微分特性
对于坑槽位置拟合的曲线,它的形状类似“碗形”,图4 所示是一典型坑槽的剖面图。坑槽位置在高程上的变化是先变小,在底部趋于平坦,然后再变大。根据坑槽在高程上的这一变化特性对道路剖面进行微分分析进一步判定坑槽特征点的属性。它具有以下特性:
1)从坑槽内最低点分别向左右进行移动计算拟合轮廓的一阶导数,导数值大于0,到达坑槽边缘处,导数值小于或等于0;
2)在坑槽边缘处,它的二阶导数为负数;
3)在整个坑槽内,存在大多数点的二阶导数值大于0。
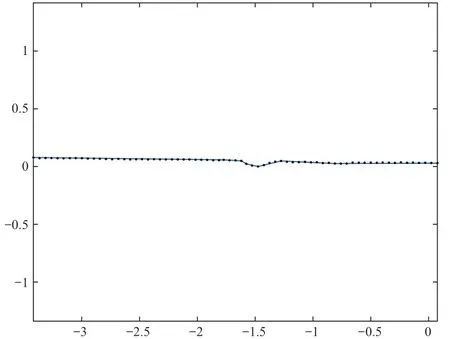
图4 坑槽剖面图
1.4.3 坑槽特征的判定条件
判定条件1:计算疑似坑槽点处的积分不变量,如果积分不变量的值大于0.5,则判定该点属性为凸;如果小于0.5,则判定该点的属性为凹。
判定条件2:①经过判定条件1,确定剖面上是否存在属性为凹的点。如果存在,则从任一凹点开始,分别向左、向右进行梯度值计算,直到一阶导数值小于或等于0 时停止,分别记录左右两个停止点。②判定左右两侧停止点处的二阶导数值是否为负,若为负则保留2 个停止点之间的点为坑槽点;否则不保留。③如果左右两侧停止点处的二阶导数值都为负,则计算2 个停止点之间每个点的二阶导数,并保留二阶导大于等于0 的点。
按照以上2 个判定条件,分别从分块数据的横向和纵向剖面进行坑槽点云提取,将2 个方向上的识别结果叠加,得到最终的提取结果。
1.5 聚类优化
通过以上运算可以获得坑槽点云和少量的噪声点,本文以点云的间距和连续性作为聚类条件。从某个坑槽种子点开始,如果一定范围内存在其他坑槽点,则将这些坑槽点聚为一类,并从这一类中另一个点重复上一个步骤,直到这些点在这一范围内没有新的点。然后在下一个坑槽种子点开始新的聚类,删除类中点云数量少于10 的类聚。本文采用点云数据同一扫描线上点间距为3 cm,扫描线间的距离为5 cm,所以设置搜索半径为5 cm。
1.6 坑槽形状面积分析
本文采用Alpha Shapes 算子从离散坑槽点集中获取坑槽的轮廓,此轮廓即为坑槽的边界。相对于路面上存在比较严重的细长型裂缝等病害,路面坑槽的形状比较接近椭圆。计算坑槽边界的长轴和短轴比值,即为坑槽的椭圆率e。根据e 的大小判定是否属于坑槽,设置判定阈值Te,如果e 大于设定阈值Te则判定属于坑槽,否则不属于坑槽。

式中,lmin为过坑槽中心的与坑槽边界交点距离最小的值;lmax为过坑槽中心的与坑槽边界交点距离最大的值。
2 实验分析
本文的实验数据是由车载移动测量系统采集获得,如图5 所示。该实验数据的长度约0.553 km,共12 631 812 个点,点云间间距为3 cm,扫描线间距为5 cm。路面信息包括坑槽、修补、裂缝和标识线等。
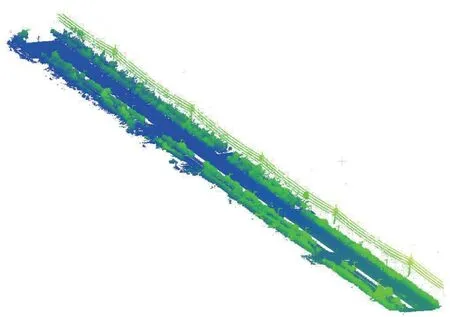
图5 道路点云数据
因为点云间的间距为3 cm,扫描线间距为5 cm,为确保纵向剖面在每条扫面线上至少有一个点,设置纵向剖面分割阈值D 为4 cm。根据《公路技术状况评定标准》规定设置路面轮廓拟合阈值d 为2 cm。参考文献[7]将椭圆率的阈值Te设为0.16。
为验证本文方法的有效性,从全部实验数据中选取分块数据中某一个的识别效果,如图6 所示。从滤波后的点云可以看出此段数据包含坑槽、裂缝,修补等路面信息如图6 左侧所示。因为本文方法对于轻微变形的坑槽也有一定的效果,通过坑槽的特征描述之后可以提取坑槽,但会把一些裂缝和修补识别为轻微变形的坑槽,本文通过聚类分析和形状分析可以剔除这些干扰,得出如图右侧所示识别效果。从结果来看,本文的方法可以提取出路面坑槽,并且对于道路其他病害的干扰有一定的对抗性。
在全部的识别结果中选取不同程度,不同形状的坑槽(如图7 所示)。图中第一行为本文方法的识别结果,第二行为坑槽所对应的图像。从识别结果看,本文方法针对细长型,圆形和不规则的坑槽,都能够较好地提取;针对图中的不明显坑槽,本文方法也有较好的识别效果;针对图中坑槽周围有裂缝,龟裂等病害,本文方法中利用聚类去燥,形状分析也能够得到较好的提取效果。
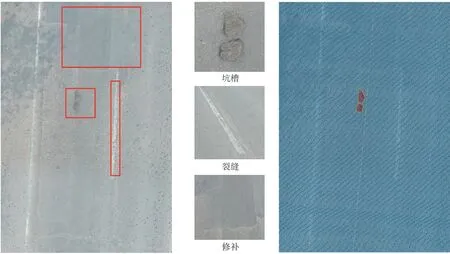
图6 某块数据识别效果
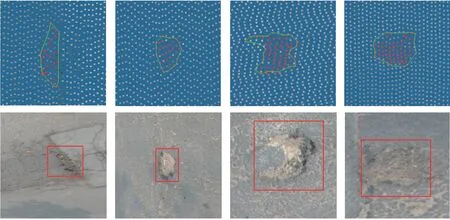
图7 不同坑槽识别效果
以坑槽的面积和深度为指标验证提取质量,用本文的提取结果与人工测量的方法进行对比,坑槽提取结果对比如表1 所示。
对于轻微变形的坑槽即面积小于900 cm2,提取的结果相对误差小于5%;对于相对比较严重的坑槽及坑槽面积大于900 cm2的坑槽,提取的结果相对误差不超过6%。根据《公路养护质量检查评定标准》对坑槽损坏程度的定义,本文方法可以有效提取轻微变形的坑槽,并且获取坑槽面积与人工测量相比具有较小的误差。本文坑槽的深度是坑槽的所有剖面中最低点到坑槽左右边界点连线的距离最大值,相对于人工测量深度绝对误差小于0.12 cm,较为精确。《公路养护质量检查评定标准》规定轻微坑槽深度小于2.5 cm,本文方法可以提取到1.6 cm 的坑槽,能够满足公路养护质量检查评定标准的要求。
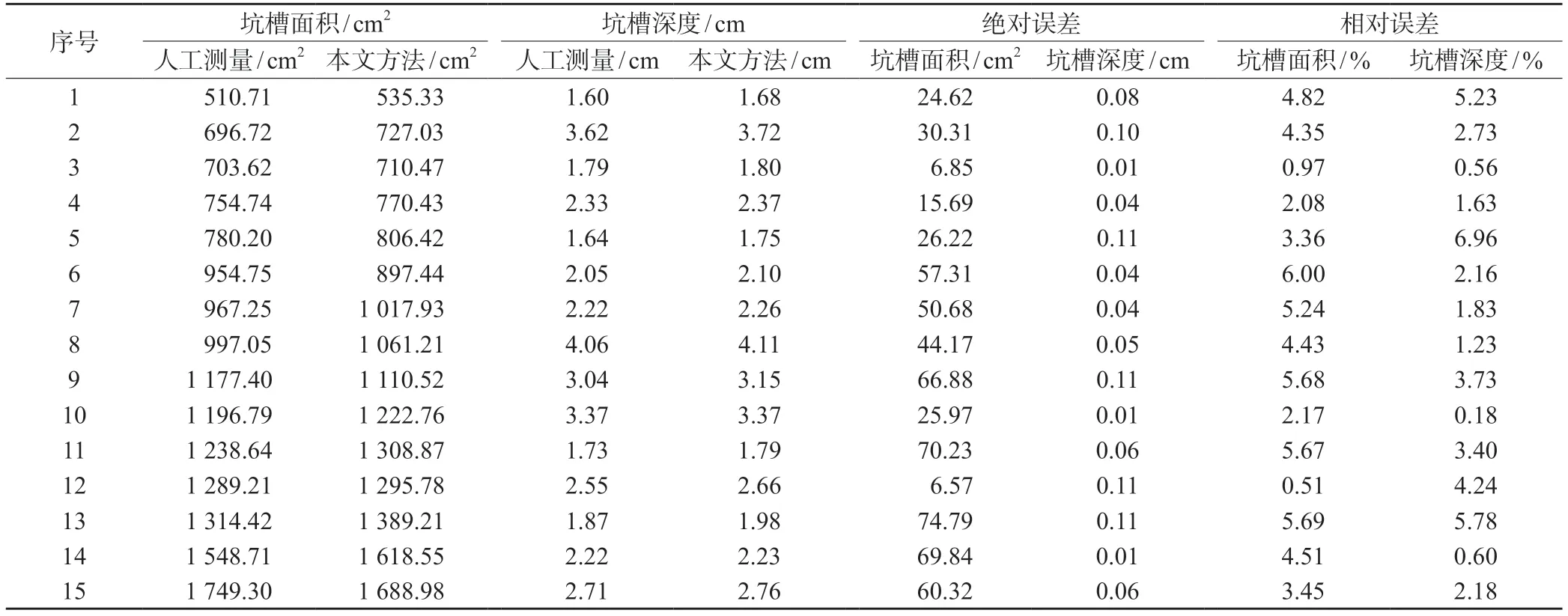
表1 坑槽提取结果对比
3 结 语
本文以车载移动测量系统采集的点云数据为研究对象,结合特征点提取的原理,提出一种基于点云剖面特征描述的路面坑槽提取方法。首先对点云进行滤波获得路面点云,根据路面点云的扫描线获取道路横向和纵向剖面;采用道格拉斯-普克算法拟合道路剖面轮廓,然后根据坑槽剖面的积分不变性和微分特性构建坑槽的特征描述算子,自动识别路面坑槽;通过点云的连续性和点云间的距离进行聚类去噪,最后经过形状分析进一步确定坑槽。实验表明本文利用点云识别坑槽有以下几个优点:提取坑槽抗干扰性强,在路面情况比较复杂情况下,本文的方法可以抵抗修补,裂缝等路面病害的影响,准确提取坑槽;提取坑槽适用性强,可以适用于不同损坏程度,不同形状的坑槽;提取坑槽准确度、精度高。本文方法可以有效识别坑槽,但对于拥包、车辙等病害未建立特征描述。在后续的研究中,将尝试引入不同变形类病害的不同特征,以同时提取并分类多种变形类病害。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
贵州大学学报(自然科学版)(2021年4期)2021-09-12
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
科技创新与应用(2018年36期)2018-01-29
自动化学报(2017年4期)2017-06-15
中国交通信息化(2017年4期)2017-06-06
国防科技大学学报(2016年6期)2017-01-07
数字技术与应用(2016年6期)2016-07-09
电测与仪表(2015年3期)2015-04-09