
基于单目摄像头的某车型驾驶辅助系统应用开发
2021-03-07 03:17邓元陶建梅张玉珠
装备维修技术 2021年46期
邓元 陶建梅 张玉珠


摘 要:为解决某车型驾驶辅助系统开发过程中出现的芯片供应风险问题,综合对比和评估了当前毫米波雷达加摄像头方案和近年新出现的单目摄像头深度学习解决方案的优势和劣势,决定采用单目摄像头作为该车型的芯片供应解决方案。针对单目视觉方案测距测速准确性不高,实时性偏差影响性能体验的不足,通过感知端优化算法精度和加大数据训练量,功能端进行功能决策优化加以优化和解决,最后通过了高里程的实车路试性能验证和整车性能验收,单目摄像头方案整体性能达到量产水平。结果表明单目视觉解决方案通过深度学习算法,能够不断提升感知端的识别能力和识别精度,进而提升整车性能表现,可以替代毫米波雷达加摄像头方案,提升产品竞争力。
关键词:驾驶辅助;单目;摄像头;深度学习
1 引言
现代社会汽车虽然给我们带来了许多便利,但却大幅增加了人们的出行风险,全球的交通事故惨剧每天都在上演。根据官方数据统计,80%的交通事故是由于汽车驾驶员在驾驶过程中不专心引起的,由此汽车驾驶辅助系统应运而生[1]。驾驶辅助系统关键技术在车辆行驶前方的目标识别和预警方面,目前大多数的车企主要以摄像头、毫米波雷达和激光雷达等传感器对前方目标识别和预警,在这些驾驶辅助系统传感器中,机器视觉又以其在价格、设备大小、系统难易程度上的特有优势,在此方向占据了重要地位。随着汽车驾驶辅助系统研究的不断深入,采用单目车载摄像头作为驾驶辅助系统解决方案搭载开发的车型越来越多。
本文针对某车型开发过程中驾驶辅助系统零件出现的芯片供应风险,综合对比和评估了当前毫米波雷达加摄像头方案和近年新出现的单目摄像头解决方案的优势和劣势,决定采用单目摄像头作为该车型的芯片供应解决方案,最终替代掉毫米波雷达加摄像头方案,通过该车型单目摄像头解决方案的成功应用开发,提升了产品竞争力,同时为后续其他车型的匹配开发积累了宝贵经验。
2技术方案
驾驶辅助阶段有两大技术流派:
一种以纯视觉算法为主。目前单目摄像头解决方案已经相对成熟,并且成本低,通过“单目摄像头+强大算法芯片”进行目标物体识别。通过计算机视觉与人工智能算法对摄像头获取的信息进行分析,获取有用的信息并做出相应的判断。大量采用CNN等深度学习算法[2],在对行人、两轮车、道路结构信息,以及交通标识的识别上,能够大幅度提升识别能力和识别精度。但同时单目摄像头也存在一定的劣势,由于单个摄像头无法获取景深,在测量目标物体之间的距离时,需要根据算法在图像中识别匹配目标物体之后,通过其在图像中的像素大小去估算目标距离,存在一定的误差。这一测量方式对算法精度和实时性水平要求很高,同时需要大量的数据训练保证准确率。
另一种以“ 毫米波雷达加摄像头”为主,是目前前装 ADAS的主流解决方案,大部分Tire1供应商和大多数的车企车型均使用此方式[3]。系统框架如图1所示,毫米波雷达用来测量距离、速度及补充摄像头的功能盲区(例如凹凸路面的检测、恶劣天气的物体探测、道路和护栏的交界区域探测等),摄像头用来识别物体的形状和类型。两相对比,前者成本较低,算法数据是核心价值,后者多传感器形式精度得到保障,但成本较高,且雷达模块体积较大,需要与整车厂同步进行嵌入式开发。随着视觉能力急速提高,大多数功能都可以用单目摄像头视觉方案替代原先毫米波雷达加摄像头方案,提升产品竞争力。
3关键问题
随着视觉传感器的制造水平和车载嵌入式设备芯片的处理能力不断上升,基于机器视觉、数字图像处理技术的目标检测算法成为驾驶辅助系统中的研究热点[4-5]。由于车辆主动安全系统需要具有严苛的实时性与准确率,要求目标识别、输出和跟踪算法必须具有准确、稳定、连续和实时的特性,这些也为后续距离预测和碰撞预警的有效性提供了保障。由于需要为驾驶员的反应预留充足时间,要求上述算法的处理时间达到接近实时处理的效果。感知端输出的目标类型、位置、速度及加速度等结果,直接影响到功能端的性能表现。
单目视觉方案测距测速准确性不高,实时性偏差是限制其替代距离传感器的主要原因,需要在开发过程中重点关注,优化和解决感知端存在的问题,主要存在的问题如下。
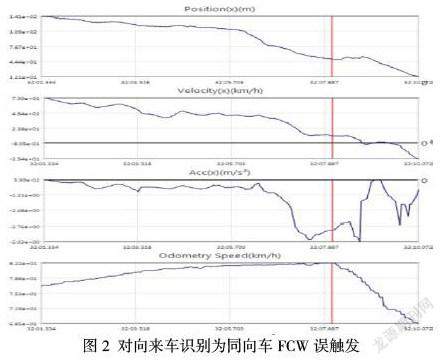
感知目标识别错误和不稳定问题:近距离行驶的异型车、跟停距离近的静止大车或者特殊小车、载人的卡车或者三轮车、跟随前方的重叠大小车、对向来车识别为同向行驶车等,出现感知目标检测错误,如出现感知误检车尾为车头、异型大车模型误检分裂为两辆车、载人车的人车物理关系未关联出现分离误检为两个目标,导致功能端出现AEB/FCW误触发问题。感知需要采集相关数据,补充数据模型,提高特殊目标识别准确度和稳定性,解决AEB/FCW误触发问题。
感知目标速度和距离突变问题:在雨天或者出入隧道口光线明暗变化的场景等,前方目标感知端输出的速度和距离存在突变的问题,导致功能端出现ACC误制动问题,直接影响到性能体验。感知采集数据分析后,原因为图像质量差,感知检测不稳定,目标框抖动造成距离和速度波动。这类场景受制于单目视觉感知的固有缺陷,需要感知端和功能端同步优化,作为重点优化问题,解决ACC误制动问题。
感知目标速度收敛慢问題:在路口有静止大小车的场景等,静止目标测速输出的速度收敛过慢,导致ACC减速时机偏晚,驾驶员出现信心不足接管车辆或者出现AEB正触发问题。采集数据分析后,原因为静止目标检测距离近,感知端后处理目标速度收敛慢,造成功能端ACC减速晚。市区路口静止目标ACC减速跟停属于很常见的场景,体验效果直接影响到用户对驾驶辅助系统的评价,ACC减速晚需要重点加以优化解决。感知端优化算法,加快目标速度收敛,同时功能端针对优化后速度曲线做适应性标定。
感知限速牌识别问题:对于某些数字或者存在遮挡的限速牌存在误识别问题,采集相关数据,补充数据模型,提高识别准确度。
4问题验证
4.1数据采集和闭环验证
因感知系统错误识别(如井盖、限速杆、减速带、隧道等物体的错误识别或错误关联)或功能决策算法錯误判断造成的功能触发,触发时驾驶员完全不理解是什么导致了报警或制动,称为误触发(AEB和FCW)。误触发道路数据采集和回灌分析的目的,主要是发现和解决不同驾驶场景下,因感知系统错误识别或功能决策算法错误判断造成的误触发。
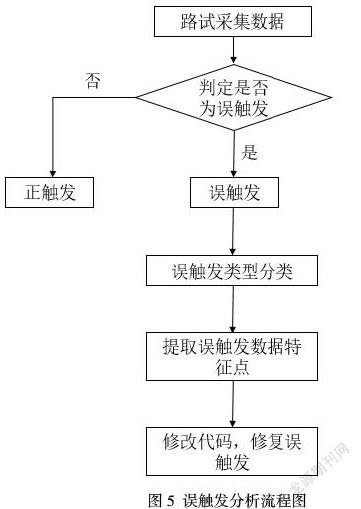
误触发数据采集和回灌分析一般在项目开发阶段完成,和功能场景正触发同步开展验证。考虑到误触发道路数采的安全性,在误触发数据采集的过程中不对制动系统进行外部制动请求,数据采集系统可以记录数据采集过程中的触发点。针对误触发道路数据采集到的数据进行回灌分析,对回灌过程中出现的误触发问题进行剖析,从感知融合和功能决策两个方面进行深入分析,根据找到的根本原因来优化算法,修复误触发问题。然后再次回灌采集数据和正触发场景数据,直到回灌满足误触发指标要求和正触发场景要求,误触发分析流程如图5所示。
经过前期的10万公里误触发数据采集和后期的20万公里实车功能闭环数据验证,结果表明该系统AEB和FCW误触发性能达到设计指标要求。
4.2性能匹配调试和验收
随着项目开发阶段的推进,对所开发功能进行测试和验证变得越来越重要。根据系统和功能需求,进行整车级功能逻辑测试、性能标定调试、场地测试、台架测试和路试等,建立相应的问题清单,通过采集的问题数据进行分析,感知端和功能端软件不断的迭代优化,快速推进问题解决关闭,特别是感知的问题。
在测试开发后期,为了加大测试验证的力度,确保尽可能多的暴露并解决功能和性能方面的问题,引入独立的第三方进行功能和性能测试。按照提供的功能规范分析道路测试方案及用例,为每个功能模块分配测试轮次和测试里程,路试全程监控各功能模块状态。动态路试方案涵盖各种道路类型、天气、光线等测试环境,并在测试中统计每个功能模块在各个测试环境中的成功率、误报率、漏报率等性能表现。
经过感知端和功能端的问题不断优化解决,顺利通过了各项验收测试评审,基于单目摄像头方案的驾驶辅助系统整体性能达到量产状态。
5结论
本文基于某车型驾驶辅助系统开发过程中出现的芯片供应风险,通过对比当前毫米波雷达加摄像头方案和单目摄像头方案的优缺点,决定采用基于深度学习算法的单目摄像头方案,该解决方案在对行人、二轮车、道路结构信息、交通标识等识别上大幅度提升识别能力和识别精度。针对视觉测距测速准确性不高、实时性偏差造成性能体验上的问题,感知端优化算法精度和加大数据训练量,功能端进行功能决策优化,通过整车性能匹配调试及验收和高里程的路试实车性能验证,单目摄像头方案整体性能达到量产水平。通过该车型单目摄像头解决方案的成功应用开发,证明可以替代毫米波雷达加摄像头方案,提升产品竞争力,同时为后续其他的车型匹配开发积累了宝贵经验。
参考文献
[1]马娟丽.汽车防撞控制系统的研究[D].西北工业大学,2007.
[2]段萌,王功鹏,牛常勇.基于卷积神经网络的小样本图像识别方法[J].计算机工程与设计, 2018, 39(1):224-228.
[3]孟凡江,尹逊政.一种基于多传感器融合的冗余测速测距系统设计[J].铁路计算机应用,2018,27(01):46-50.
[4]苏欣欣,郭元术,李妮妮.基于深度学习的车辆检测算法研究[J].信息技术与网络安全.2021,40(06):28-32.
[5]黄生鹏,范平清.基于深度学习的实时车辆检测研究[J].软件工程.2021,24(01):13-16+5.
作者简介:
邓元(1985-),男,硕士研究生,工程师,研究方向:汽车驾驶辅助系统集成开发。
3732500589225
猜你喜欢
航空模型(2016年11期)2017-05-08
江苏教育·中学教学版(2016年11期)2016-12-21
现代情报(2016年10期)2016-12-15
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25
科技资讯(2016年9期)2016-05-14
网络与信息(2009年6期)2009-07-31
网络与信息(2009年5期)2009-05-29
