YOLO系列算法在光伏组件缺陷检测中的应用与分析
2021-03-09 09:42周全民杜玉杰叶征灯占太晏
新型工业化 2021年1期
周全民,杜玉杰,叶征灯,占太晏
(国家电投集团江西电力有限分公司高新清洁能源分公司,江西 南昌 330077)
0 引言
随着科学技术的不断进步,人类自然生活中对能源的需求越来越大。由于传统能源的日益枯竭、不可再生和环境污染的特性,以太阳能光伏发电为代表的新能源日渐引起人们的关注[1]。太阳能光伏发电具备非常多的优势,如:不会枯竭、不受地域的影响与制约、使用寿命延长、维修简单[2]。步入21世纪后,在我国可持续资源战略的推广下[3],太阳能光伏发电技术日益成熟,对于服役运行中的光伏组件的缺陷巡检方式,可分为基于热红外图像的传统人工巡检和通过无人机等技术实现的自动化巡检。热红外图像上可检测判断的光伏组件缺陷,主要可分为点斑、多斑、条斑和空载四大类别。本文主要引入基于深度学习的目标检测的YOLO系列主流算法,具体为YOLO v2、YOLOv3及YOLOv4对热红外图像的光伏组件缺陷进行检测识别,通过对比分析,最终选定在光伏组件缺陷检测中最优的算法模型进行AI落地应用。
1 YOLO系列算法简介
YOLO算法作为一阶段深度学习目标检测算法,于2016年由Joseph Redmon等人提出,其核心思想是将物体的位置和物体的类别统一为如公式(1)所表达的回归问题[4]。

预测过程如图1所示,是将一张输入的图像划分为S*S的网格,每个网格负责预测中心落在其内部的检测对象。
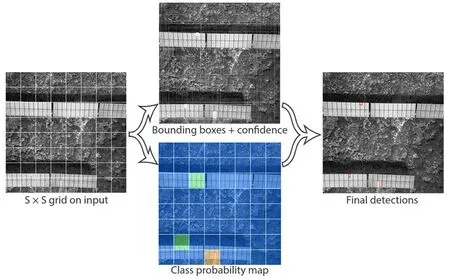
图1 YOLO目标检测方法
在YOLOv1算法的基础上,Redom团队于2017年在CVPR上提出了YOLO9000[5],习惯上称为YOLOv2目标检测算法模型。在该目标检测算法模型中,主要提出了一种联合训练算法的新型训练方法,该方法在训练模型的时候可以将检测数据集与分类数据集进行融合,检测数据集主要负责学习物体的准确位置,分类数据集主要学习物体对象的类别预测。在此基础上,对YOLOv1做了如图2所示的大量改进。
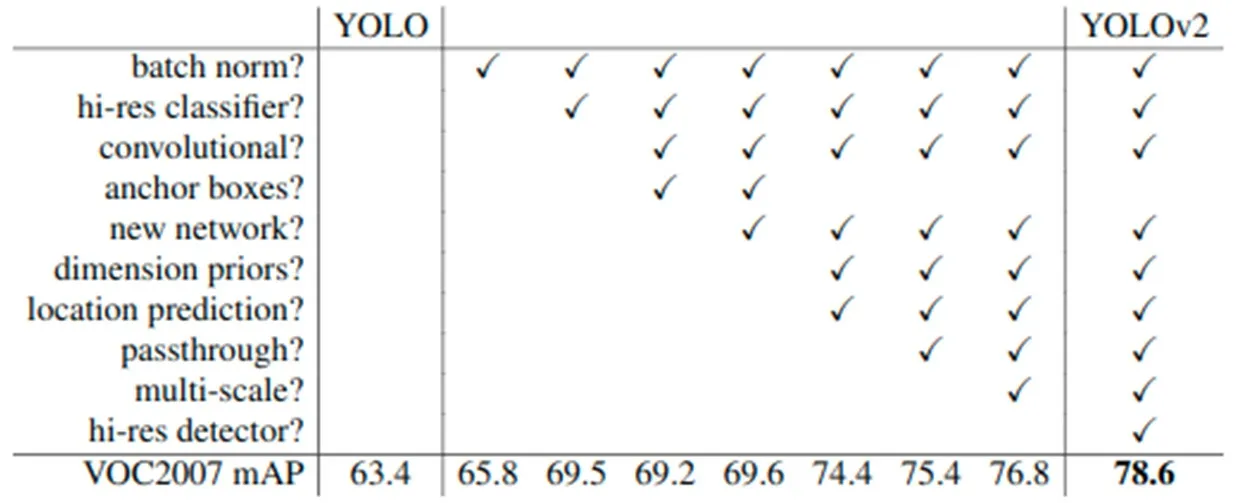
图2 YOLO到YOLOv2的改进
Redmon 和Farhadi持续对YOLO系列做了一系列更新,于2008年提出了YOLOv3[6]。在YOLOv3中,作者引入了多尺度预测,将9个聚类中心按照大小分给3个尺度进行box的预测,使用3×3和1×1的卷积层实现了类似于残差网络的Darknet-53基础分类网络。除此之外,对分类损失采用了二分类交叉损失熵,在边界框的预测上面增加了如公式(2)所示的带有维度先验和定位预测的边界框。

YOLOv4目标检测算法是由Alexey等人在2020年提出,相比于YOLOv3而言,在基础网络等算法理论上面并未有过大的创新,而主要是针对最近两年目标检测上面的发展,作者大量引入了现有技术,对模型的训练进行尝试优化,比如有WRC、CSP、CmBN、SAT、Mish activation、Mosaic 数据增强、DropBlock正则化、CIoU损失以及一些功能来实现最先进的组合结果[7]。
2 模型的训练
在本实验中,对于模型的训练共分为数据集制作、网络模型微调、迁移训练。
(1)数据集制作。通过无人机搭载热红外镜头,根据划定航线进行初步图像数据的采集。从采集的图像中人工总共选出了具有光伏组件缺陷的热红外图像3048张,随机划分为训练集(1599张)、验证集(536张)和测试集(913张)。对这些图像统一将热红外图像根据温度信息转换为灰度图像,对训练集做随机翻转、裁剪、缩放的数据增广。
(2)网络模型微调。在本实验中,根据热红外图像的光伏组件缺陷(点斑、多斑、条斑和空载)4大类别,将DarkNet YOLOv2、YOLOv3及YOLOv4原有的输出类别进行微调,由原有的80类别改为4类。事先利用K-Means聚类算法在总数据集中寻找几种较优的anchor框尺寸[8],计算得出YOLOv2的anchors为“19, 12, 13, 24, 26, 17, 54,28, 123, 28”;YOLOv3、YOLOv4的anchors为“7, 13, 18,11, 12, 22, 22, 14, 16, 27, 33, 18, 40, 40, 102, 23, 148, 42”。
(3)迁移训练。对YOLO系列的主流算法YOLOv2、YOLOv3、YOLOv4检测模型,使用同样的数据集,分别在其对应的原有预训练模型上面进行迁移学习、微调训练。总的训练步数统一调整为10000步,初始学习率为0.001,分别在7000步、8000步、9000步对学习效率进行0.1倍率的更新。
3 验证分析
本实验的软件与硬件如表1所示。在本实验中,数据处理方面使用Python3.8作为编程语言,算法模型相关的编程采用C++11作为编程语言,深度学习框架采用DarkNet,使用GPU加速计算。在对热红外图像的光伏组件缺陷的检测模型迁移训练中,YOLOv2、YOLOv3、YOLOv4在验证集(536张热红外光伏组件缺陷图像)上的具体测试效果与性能如表2。
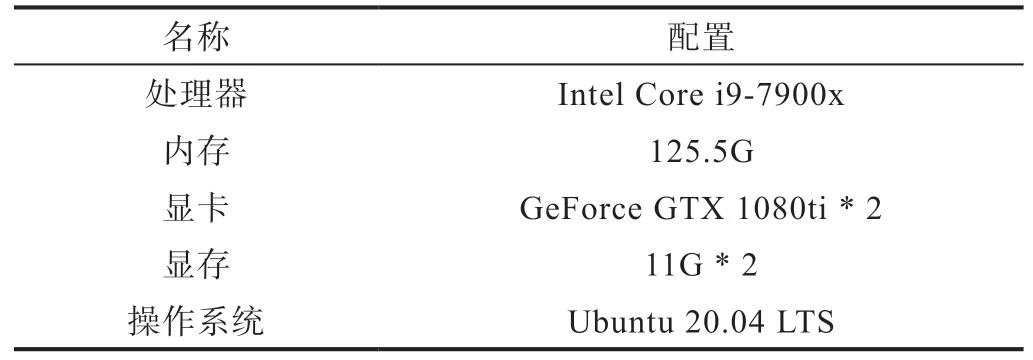
表1 实验配置

表2 测试结果
通过表2对比分析,对于基于热红外图像的光伏组件缺陷检测。在推理速度上,基于YOLOv2模型最快,YOLOv4模型速度上最慢,YOLOv3接近于YOLOv2,远高于YOLOv4;在模型预测的准确率上面,无论是平均准去率还是各缺陷类别的准确率,YOLOv3高于YOLOv4,YOLOv2最低。综合对比分析,在本实验中最终选用表现优异的YOLOv3目标检测算法模型进行对光伏组件缺陷的检测。
对YOLOv3模型在测试集(913张热红外的光伏组件缺陷图像)上进行最终的测试与评估,具体结果如表3所示。

表3 YOLOv3 测试验证结果
通过表3的具体验证分析,在本实验中最终确定落地应用于太阳能光伏发电组件的缺陷检测算法模型为YOLOv3算法模型,模型推理预测时的置信度为0.35。在实际的落地应用中,对基于无人机采集的热红外光伏组件的缺陷检测如图3。

图3 光伏组件缺陷检测
4 结论
本文针对新能源领域的太阳能光伏发电组件的缺陷检测,提出了基于无人机搭载热红外镜头采集光伏组件的热红外图像,并对其基于温度参数转换为灰度图像,通过YOLO系列主流算法进行模型的训练、预测与评估,最终通过实验对比与结果验证,选定基于DarkNet 的YOLOv3为实际太阳能光伏发电组件的缺陷预测进行AI的落地应用,对其应用模型在推理预测时的置信度为0.35时最优,对光伏组件日常的点斑、多斑、条斑与空载4大缺陷类别的整体预测程度可达到91.22%。
猜你喜欢
能源工程(2022年2期)2022-05-23
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
电子制作(2019年7期)2019-04-25
光学精密工程(2016年3期)2016-11-07
新校长(2016年8期)2016-01-10
太阳能(2015年11期)2015-04-10
商事法论集(2014年1期)2014-06-27