利用地基激光雷达估算不同地表条件下土方量
2021-03-11 01:11冯凯月马利霞于东升
农业工程学报 2021年23期
冯凯月,马利霞,陈 洋,王 鑫,宋 洁,于东升※
(1. 土壤与农业可持续发展国家重点实验室,中国科学院南京土壤研究所,南京 210008;2. 中国科学院大学,北京 100049)
0 引 言
土方量估算是土地整理[1]、土地平整[2]、矿区复垦[3]及土壤侵蚀监测[4-7]等农田工程建设的关键环节。激光雷达技术(LiDAR)以非接触式测量方式获取高分辨率点云数据并精细化重构地表三维信息,已被广泛应用于土体变化监测相关领域[4,7-8]。应用LiDAR 技术估算不同地表覆盖条件下的土方量,对刻画形变过程、提高平整土地效率、加快矿区复垦进度及刻画土壤侵蚀进程具有重要意义。
常用于估算土方量变化的LiDAR 技术包括机载激光雷达(Airborne Laser Scanning,ALS)和地基激光雷达(Terrestrial Laser Scanning,TLS)。ALS 一般用于大尺度的滑坡、泥石流、矿山工程及土地平整土方量的定量监测与分析[1,9-11],其自上而下获取数据的方式导致地表监测易受地表覆盖影响[9];而自下而上获取数据的TLS更适用于中、小和微尺度的地表形变动态监测,其采用近距离观测及静态采集方式,生成更高数据分辨率和精度的3D 模型[7,12-14]。Goodwin 等[7]利用全站仪对TLS 在植被稀疏的野外沟壑侵蚀监测精度评价,发现TLS 在控制点监测高程的标准差为0.047 m。Li 等[5]通过室内模拟降雨比较不同坡度石质径流小区TLS 估算土壤侵蚀量的精度,发现其相对误差为6.80%~31.80%;Hu 等[15]基于实验室内木箱和千分尺实测砂石模型的体积,验证TLS测量砂石土方量精度,表明两者体积的相对误差为0.637%。因此,TLS 具有精确估算土方量的能力。
目前基于TLS 估算土方量及土壤侵蚀量的研究多基于单一地表条件。Chen 等[16]曾基于TLS 估算了露天矿区滑坡的土方量,并提出一种识别滑坡形变的计算方法。Stumvoll 等[17]利用多时相TLS 数据刻画了草地覆盖下滑坡区演变的动态过程。Rengers 等[18]基于TLS 估算了一定时段内稀疏草地区域的沟壑侵蚀量。Gao 等[19]在地表裸露的径流试验小区沟壑侵蚀监测表明,TLS 估算侵蚀量平均相对误差为11.3%。Eltner 等[20]则基于TLS 和无人机(Unmanned Aerial Vehicle,UAV)数据监测了无植被和低矮植被覆盖下农田2 a 时段的土壤侵蚀量,并表明密集植被会造成地表高程高估。尽管TLS 在该领域取得广泛应用,但严重缺乏TLS 估算土方量精度的评估,且不同地表条件下(复杂地形、砾石含量和植被密度)TLS 估算土方量的适用性仍需探讨。
土体形变量的计算是TLS 估算土方量的基础。常用于计算点云土体形变量的方法主要包括 DEM of Difference(DoD)[21]、Cloud-to-Cloud Comparison(C2C)[22]、Cloud-to-Mesh Distance or Cloud-to-Model Distance(C2M)[23]及Multiscale Model to Model Cloud Comparison(M3C2)[24]。DoD 基于两期点云数据反演的数字高程模型(Digital Elevation Model,DEM),逐个像元计算土体形变量,计算效率高且适用于地表平缓区域土体形变量的计算[21]。C2C 基于前后两期三维空间内最近邻点对的高程差来量化土体形变量,具有计算过程简单、对点云密度要求高的特点[24]。C2M 首先基于前期点云数据构建三角网(Triangulated Irregular Network,TIN)或DEM 模型,进而计算后期点云到TIN 或DEM 的距离以量化土体形变量,但方法耗时费力,易导致地表细节信息的丢失[24]。M3C2 通过计算一定范围内两期点云在法线方向的高程变化,以表征土体形变量。该方法适用于地形起伏大,地表覆被条件复杂的区域,但未考虑植被遮挡区域的土体形变量[24]。
TLS 能识别地表形变,生成高精度的DEM,但计算精度会受到仪器设置、大气条件、物体表面特性、几何形状、地形特征和环境因素等影响[25]。其中测站位置[5]、数量[7]和点云间距[26]通过影响点云数据的缺失程度或分辨率,进而影响构建表面模型的精度[25]。Barneveld 等[12]利用TLS 数据构建不同耕作时期土壤表面DEM,研究表明DEM 精度随构建栅格像元分辨率的降低而下降,并建议多时相观测土壤表面时应选择最优的扫描视角及栅格分辨率。Nouwakpo 等[27]研究表明不同植被覆盖条件下单个站点TLS 的数据缺失程度,受植被在扫描仪视角下几何投影的影响,不受植被覆盖度的影响。但上述研究尚缺乏测站数量、位置和点云间距对TLS 在不同地表条件下土方量或土壤侵蚀量计算精度的定量分析,不同地表条件下TLS 适用性以及最优的测站布局并不清晰。
因此,本研究在江西省鹰潭红壤生态实验站模拟了7种不同地表条件的样方,利用TLS 技术和DoD 方法计算7 个样方的填/挖土方量,分析TLS 技术计算不同地表条件的土方量精度,揭示不同测站数量、测站位置和点云间距对土方量计算精度的影响,后期为TLS 野外监测土壤侵蚀量提供精度和参数设置依据。
1 材料与方法
1.1 研究区概况
研究区位于江西省鹰潭市红壤生态实验站(28°15′N,116°55′E)(图1),地处鄱阳湖流域赣东北丘陵区,地势平坦。属亚热带季风气候,多年平均降水量为1 785 mm,年内降雨分配不均,其中7-9 月为雨季,占全年总降水量的50%,3-6 月为旱季,占全年降水量的20%[28]。多年平均气温为17.8℃,年平均日照时数1 750 h,无霜期262 d。土壤类型为发育于古河床的第四纪红黏土,夹杂大量鹅卵石,平均砂粒、粉粒和黏粒占比依次为24.56%、37.48%、37.96%;植被则以马尾松(Pinus massoniana Lamb)和白茅为主[29]。
1.2 试验设计
在鹰潭红壤生态实验站设置6 种不同地表条件的填土样方试验小区(1~6 号)和1 个复杂地形的挖土样方试验小区(7 号)(图1)。1~6 号试验区位于海拔为48 m、坡度为8°的缓坡上,坡向为78°;各小区长、宽分别为2.5、10.0 m,四周用水泥板与外部隔开。经人工去除原有全部杂草、灌木及根系(4~6 号小区保留部分马尾松树木),并平整踏实后进行第1 次TLS 扫描。6 个小区再经填土、平整踏实后,1 和5 号小区栽种象草,3和4 号小区栽埋鹅卵石,形成的地表覆盖状态分别为稀疏象草(Pennisetum purpureum Schum)、地表裸露、夹杂砾石、马尾松+砾石、马尾松+稀疏象草以及纯马尾松林(表1),并进行第2 次TLS 扫描。7 号样方位于1~6 号样方东北侧约120 m 处,海拔44 m,其微地形起伏较大,平均坡度20°,相对高程为2 m,且有降水冲刷形成细沟和冲沟分布(图1),分别在挖土前后进行2 次TLS 扫描。
各试验小区填/挖土过程中,将7 号样方的土壤装填至编织袋中,分别运输至1~6 号样方称质量(精度为0.01 kg)、填土。1 号和5 号小区栽种象草,平均高度控制在7 cm。3 号和4 号样方表土层均匀栽埋了146.30、156.40 kg 鹅卵砾石,长、宽分别为5.0~20.0、5.0~15.0 cm(图1);利用排水法测得2 个样方内砾石平均密度,结合砾石质量分别求得3 和4 号样方内砾石的体积。1 和5号样方原有象草与4、5 和6 号样方原有马尾松均于2016年种植,平均树高3.2 m,平均间隔1.5 m(表1)。
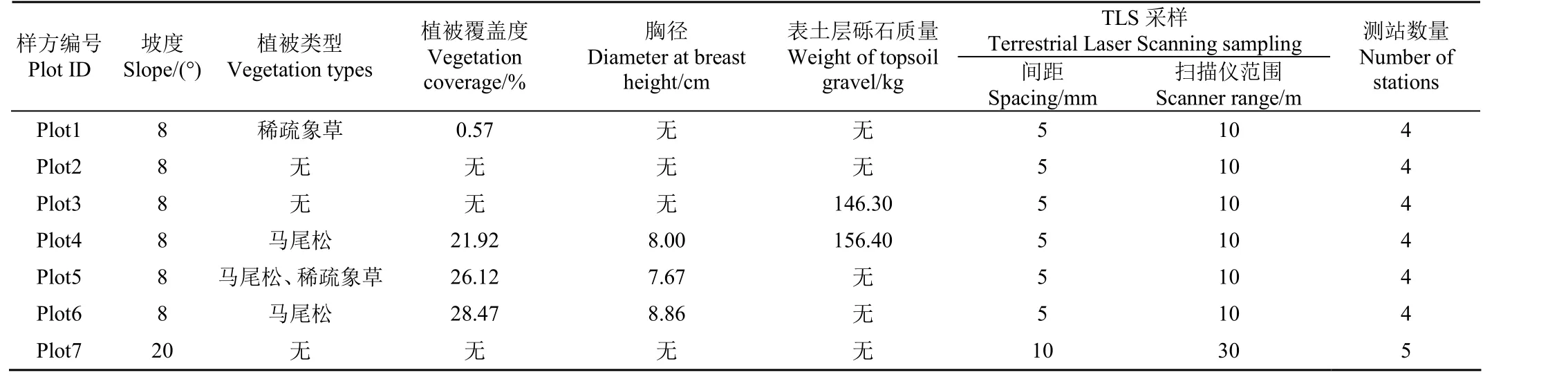
表1 不同地表条件下试验样方基本概况Table 1 General situation of experimental plots under different surface conditions
1.3 TLS 数据获取及预处理
2019 年11 月3 日—4 日利用地面三维激光扫描仪(Leica ScanStation P40)获取1~7 号样方填/挖土前后的两期点云数据。为减小植被遮挡,每个样方均采用多站扫描方式获取完整的地表点云数据。其中1~6 号样方四角分别设置一站;其中1、4 测站地势位置相对较低;2、3 测站地势位置相对较高(图1)。7 号挖土样方面积较大(211 m2),共进行5 站扫描,包括中心位置一站以及四角各一站。为便于不同站点及填/挖土前后数据的配准,在每个样方周围设置3 个固定位置放置标靶(图1)。TLS扫描仪50 m 范围内点位误差小于3 mm,数据采样间距在10 m 范围内小于5 mm,每个测站的水平、垂直视场角分别为0°~360°、−45°~90°。
以填/挖土前TLS 数据的第一测站坐标系统为空间参考,利用Cyclone 软件将每期的多站数据进行配准。得到所有样方完整的点云数据,其平均配准误差控制在2 mm以下。配准后通过多边形裁剪方式手动去除明显植被点。
1~6 号及7 号样方分别设置了4 和8 个表层土壤采样点,利用环刀及烘干法测量土壤容重及含水率。1~6 号样方上下坡土壤采样点位置间隔6.0 m,左右土壤采样点间隔1.5 m(图1)。7 号样方8 个土壤采样点均匀分布在采土区域内(图1)。根据每个样方的平均土壤含水率、容重数据,结合实际填/挖的土方量总质量以计算土方量干质量数据,用于评价TLS 计算土方量精度。
1.4 地面点提取
1)设置二维规则网格,利用平面坐标将点云数据进行网格化[30]。为保证每个网格中的最低点为真实地面点,网格边长通常大于样方内最大地物点的尺寸。各样方内地物点为树桩及砾石,但砾石出露高度较小,与地面点区分度较差,故依据树桩直径设置网格边长为0.1 m(图2a)。
2)利用k-d 树搜索每个邻域网格中高程最低点作为初始地面点[30],并依据目标网格邻域内地面点构建拟合曲面。当邻域内搜索的网格数量大于拟合曲面未知参数个数(6 个),拟合曲面才更接近于实际地形表面[31]。在地形平缓区域(1~6 号),3×3 邻域网格易受局部地形影响,将地表起伏处滤除;7×7 与5×5 邻域网格计算精度差别较小,但前者计算效率较低,故将1~6 号样方邻域网格数量设置为5×5(图2b)。
7 号样方地形起伏较大,在邻域选取时需考虑坡度因素。通过计算目标格网对5×5 邻域内网格的平均坡度值(Slope),确定邻域大小。若坡度较大(Slope>10°),为避免滤除地形起伏区域,选用3×3 邻域大小选取初始地面点;反之,选用5×5[30]。计算如下:
式中X、Y、Z分别为目标格网高程最低点的x、y、z坐标,i为第i个邻域网格,Xi、Yi、Zi为第i个邻域格网中高程最低点的x、y、z坐标。
初始地面点仅能代表局部邻域内高程最低值,不能有效刻画地表起伏的细节信息,需通过构建二次曲面、设置高差阈值(∆h)进行二次筛选。本研究基于最小二乘法,利用初始地面点构建二次曲面,以拟合局部区域的地形表面(图2c)。计算如下:
式中xi、yi、zi分别为第i个初始地面点的坐标,a0、a1、a2、a3、a4、a5分别为拟合参数。
遍历网格统计每个网格内各点与最小二乘曲面的距离,进而选取最优高差阈值以识别目标网格中的地面点(图2c)。在局部地形相对平缓的区域,构建的曲面接近于实际地形表面;而区域内非地面点主要为树桩及象草,经统计树桩及象草与局部最小二乘曲面的高差范围为0~5 cm。
3)综合考虑植被和地表特征,通过目视判断的方式评价滤波效果。依次比较高差范围内不同∆h的滤波效果,并通过减小或增大∆h的方式解决杂草遗留或过度滤波等问题,进而选择最优高差阈值。将距离曲面超过高差阈值的点判定为非地面点,并予以滤除。
1.5 土方量计算
将提取的地面点网格化,网格大小为1 cm×1 cm,每个格网内所有点的高度均值作为该格网的高度(图2d)。对于植被遮挡造成的点云缺失区域,通过搜索15 个近邻点结合反距离加权(Inverse Distance Weighted,IDW)方法进行插值补缺,最终得到填/挖土前后样方完整的地表点云数据。
将填/挖土前后样方两期地表点云数据进行比较,基于每个网格的地面点的高度变化(hi)计算各网格的体积变化量,得到样方土体形变的总体积(式(3))(图2d)。
式中ΔV为样方形变总体积,m3;hi为第i个网格高度变化量,m;cellsize 为网格边长,本研究取1 cm。
对于有乔木及砾石的样方(3、4、5、6 号),其计算的总体积还需分别减去埋没树干及砾石的体积,得到样方形变体积(ΔV2)。将插值后两期点云数据中树干位置处的点云分别进行裁剪,以避免参与后续体积变化的计算。基于滤除的植被点云数据,利用体元法[32]计算1、4、5、6 号样方的植被覆盖度。
最后,利用同步检测的土壤容重数据,求得土方量的干质量数据。
式中Pred为TLS 计算土方量,kg;ρb为土壤容重,kg/m3;ΔV2为样方形变体积,m3。
1.6 土方量计算精度验证
通过比较实际土方量与TLS 计算土方量数据,利用绝对相对误差(Absolute Relative Error, ARE)、均方根误差(Root Mean Square Error ,RMSE)和相对均方根误差(Relative Root Mean Square Error,rRMSE)进行精度评价,计算公式如下:
1.7 TLS 测站布局及参数设置
为分析TLS 不同测站数量计算土方量的差异,对1~6号样方4 个测站,按1、2 和3 个测站数目分别进行排列组合;以4 个测站计算样方体积为基准,利用平均ARE评价不同测站数量对土方量计算精度的影响。
同时,利用各样方测站上述排列组合方式和平均ARE 评价方法,分析7 种不同测站位置组合对土方量计算精度的影响,包括:1)地势高单个测站:S2、S3 测站;2)地势低单个测站:S1、S4 测站;3)对角线组合:S13、S24 测站;4)长边组合:S12、S34 测站;5)短边组合:S14、S23 测站;6)地势两高一低组合:S123、S234 测站;7)地势两低一高组合:S124、S134 测站组合。
基于k-d 树构建三维领域的重采样方法[33],将原始采样间距(5 mm)的点云数据以1 cm 间隔从1 cm 依次抽稀至10 cm 和以2 cm 间隔从10 cm 依此抽稀至20 cm;以原始采样间距的点云数据计算的土方量为参考,利用ARE 分析不同点云间距对TLS 计算土方量精度的影响。
2 结果与分析
2.1 实测土方量
1~7 号样方实测土方量数据如表2 所示,各样方平均土壤含水率为16%。其中,2 号样方填土质量最大(湿质量为 3 287.77 kg),4 号样方最小(湿质量为1 830.12 kg)。6 个样方填土湿质量及干质量数据的总和分别为7 号样方挖土土壤的湿质量及干质量。7 号样方实际挖土体积为8.81 m3,1~6 号样方填土体积范围为1.26~2.19 m3。因1~6 号为人为填土样方,7 号为未经人为扰动的土壤,故1~6 号样方土壤容重较小且相近,7 号样方土壤容重相对较大。
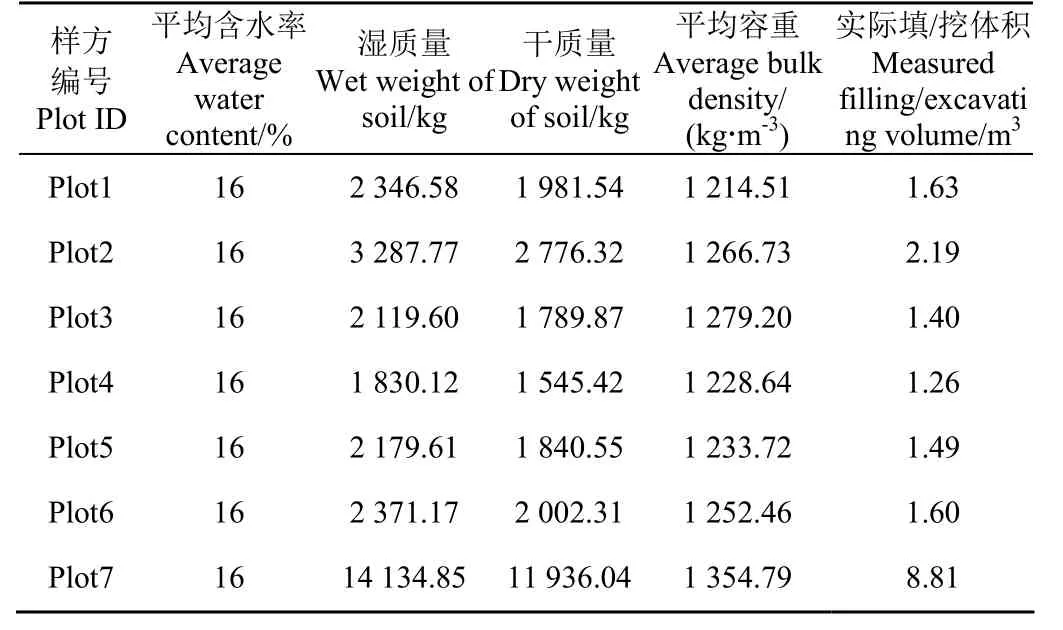
表2 1~7 号样方实测土方量Table 2 Measured earthwork volume of plot 1~7
2.2 三维地表形变
多个高差阈值∆h(1、2、3、4、5 cm)的滤波效果(图3)表明,当∆h为1、2 cm 时,地面点被错误滤除;∆h为4、5 cm 时,部分树桩及草被保留;而当∆h为3 cm时,多数树桩和草被滤除,地面点也被较好保留,故1~6号样方最优高差阈值为3 cm。受地形起伏的影响,7 号样方最优高差阈值为6 cm。填/挖土前,1~7 号样方土体相对高度为−3.62~−0.48 m;填/挖土后,土体相对高度范围为−3.62~−0.39 m。1~6 号样方地表高度变化范围为0~0.15 m(图4)。
其中,2 号样方高度变化最大(平均变化高度为0.09 m),4、5、6 号样方高度变化较小(平均变化高度分别为0.05、0.06、0.06 m)。6 个样方内上坡高度变化大于下坡,1、3、4 号样方中部高度变化比其他样方小。土体变化高度小于0.01 m 的区域主要分布在1~6 号样方的上下坡边缘。7 号样方高度变化范围为−0.15~0.38 m(图4g)。挖土区边缘分布少量负值,主要是运输土体过程中少量土体堆积造成的。
2.3 TLS 计算土方量精度
基于 TLS 计算不同地表条件下土方量 ARE 为1.69%~18.17%(RMSE=826.98 kg,rRMSE=24.25%)(表3);其中,有马尾松及稀疏象草分布的5 号样方ARE最小(ARE=1.69%),地形起伏较大的7 号样方误差最大(ARE=18.17%)。相比实测数据,1~6 号样方土方量存在轻微低估,7 号样方存在高估。然而7 个样方ARE均低于18.17%,表明TLS 可用于估算不同植被、不同土壤砾石含量及复杂地形条件下的土方量。
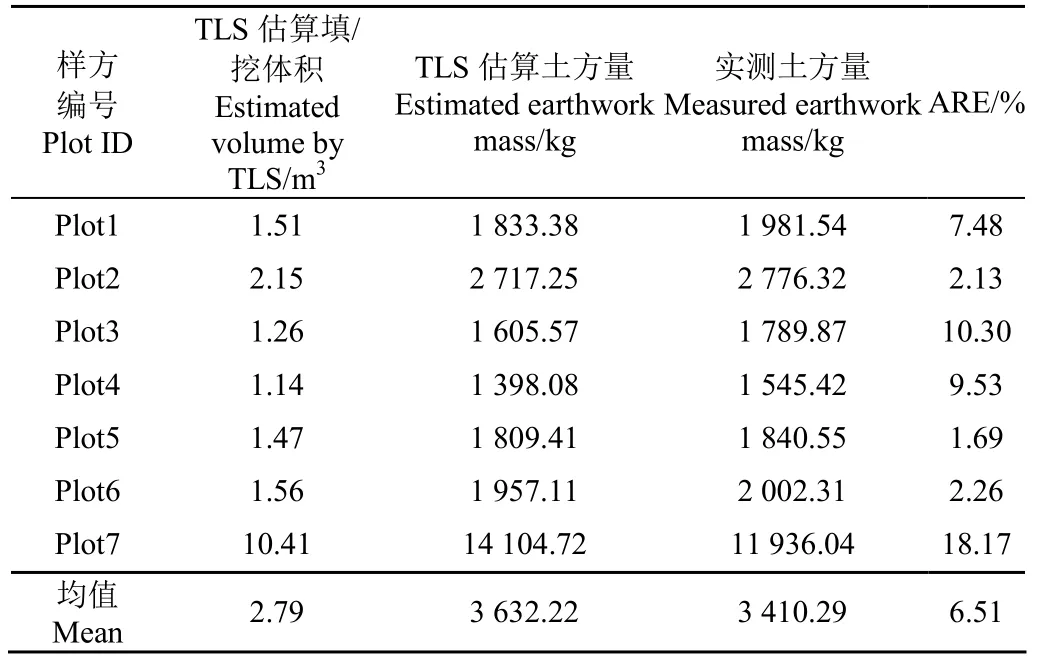
表3 实测与TLS 估算土方量绝对相对误差Table 3 Absolute Relative Errors (ARE) of estimated earthwork of each plot compared with the measured earthwork
2.4 不同TLS 野外设置下土方量的估算精度
以4 站点云数据计算土方量体积为参考,当测站数≤3 个时,TLS 计算土方量的ARE 均低于4.56%。随测站数量增加,ARE 呈减小趋势,且不同样方的ARE 差异减小(图5a)。1、2 和3 个测站数目条件下,TLS 计算土方量ARE 分别为0.14%~1.98%、0.08%~0.72%、0.01%~0.17%,表明测站数量越多,更能准确地识别样方地表形变。当测站数目<3 时,植被覆盖度为20%~30%的4、5、6 号样方估算土方量的ARE 较大,无地物覆盖的2 号样方较小;而当测站数量为3 时,各样方估算土方量的ARE 差别较小。
以4 站点云数据计算土方量体积为参考,不同测站组合方式下基于TLS 计算各样方土方量的ARE 均不大于4.56%。当测站数量为1 时,高地势位置测站(S2、S3)下土方量估算误差明显高于较低地势测站(S1、S4)(表4)。当测站数量为2 时,不同测站组合下计算土方量ARE 由大到小依次为对角线组合(S13、S24 测站,ARE为0.06%~0.71%)<长边组合(S12、S34 测站,ARE 为0.01%~0.94%)<短边组合(S14、S23 测站,ARE 为0.16%~4.39%),S23 测站组合的ARE 最高。因此当测站数量为2 时,应选择对角线的布设方式。当测站数量为3 时,ARE 均低于0.54%,地势两低一高组合(S124、S134 测站,ARE 为0.02%~0.31%)估算土方量的误差均小于两高一低组合(S123、S234 测站,ARE 为0.01%~0.54%)。
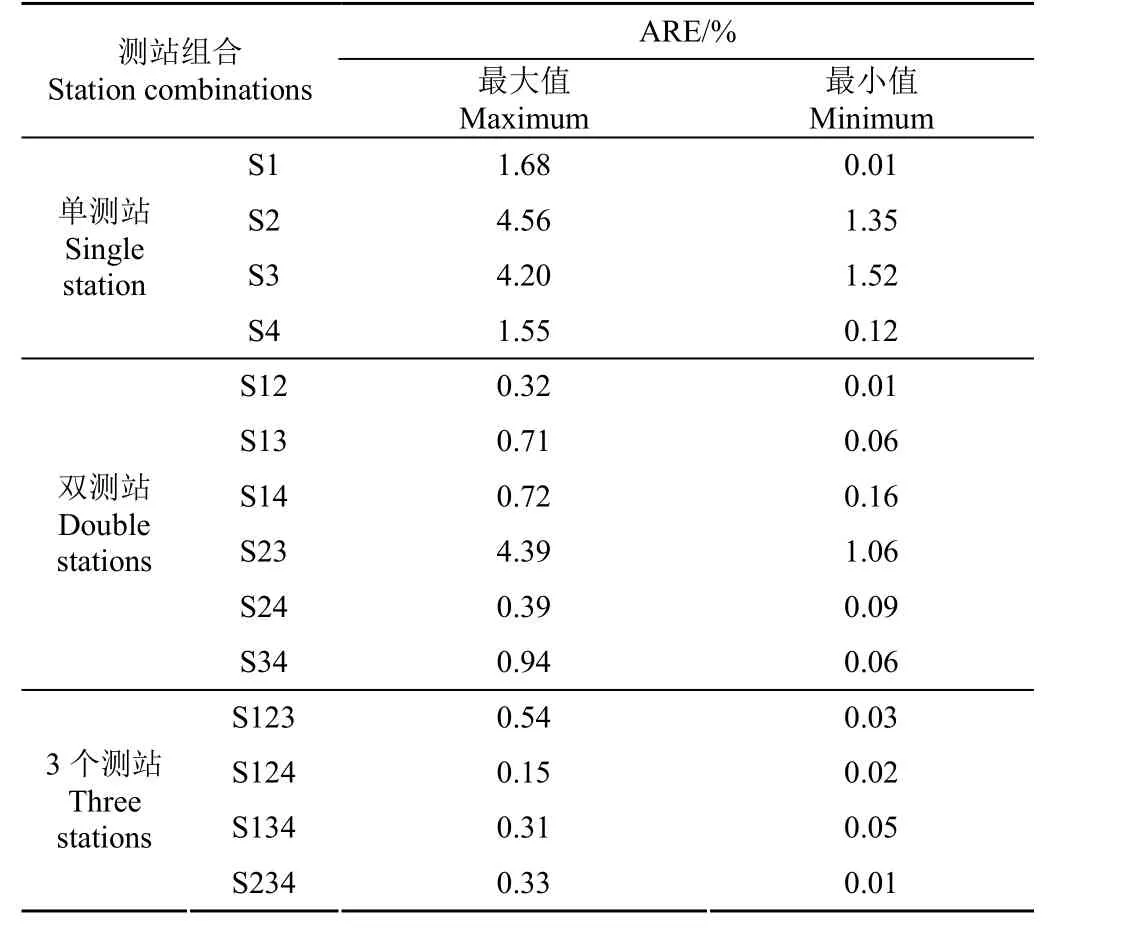
表4 不同测站组合条件下土方量估算的ARETable 4 ARE of earthwork volumetric estimations under different scan combinations
基于TLS 计算土方量的平均ARE 随点云间距的增加总体呈增加趋势(图5b)。以原始点云间距计算结果为参考,不同点间距下1~6 号样方的ARE 均不大于8.68%。不同地表条件下最优点云间距范围存在不同。地表裸露的2 号及马尾松覆盖的6 号样方最优点间距为1~8 cm,其余4 个样方为1~4 cm。有马尾松和砾石分布的4 号样方在不同点间距下估算的土方量误差最大,地表裸露的2号样方误差最小。
3 讨 论
3.1 TLS 估算土方量的适用性
Hu 等[15]在室内条件下基于单个测站TLS 数据估算砂石土体变化的体积,误差(ARE=0.637%)低于本研究结果(ARE 为1.69%~18.17%)。原因可能是Hu 等[15]的研究中土体变化高度(25 cm)较本研究(5~9 cm)大。通常土体高度变化越大,激光传播误差引起的不确定性越小,因此监测精度越高[5]。Eltner 等[6]基于TLS 估算低矮作物覆盖下农田土壤侵蚀量,发现土壤表面形变高度大于1.5 cm 时,TLS 监测结果更可靠。
土壤容重的不确定性也会降低土方量计算的精度。本研究环刀采样深度约为土壤表层5 cm,而6 个样方平均填土高度为5~9 cm。由于压实作用,土壤下层的容重会高于土壤表层[34],因此实际测量的容重偏低,导致基于TLS 计算1~6 号样方的土方量偏低。
在不同的地表条件下,TLS 估算结果的精度由低到高依次为7 号(复杂地形),3 和4 号(含砾石),1 号(稀疏象草),2 号(裸露地表),5(马尾松+稀疏象草)和6 号(马尾松林)。2、5 和6 号样方的估算误差小且精度相近,原因是2 号样方无地物遮挡,5、6 号样方乔木点云容易被识别,象草稀疏且高度较低,因此易将植被点云去除,对高度变化计算误差的影响较小。而1 号样方象草密度高于5 号导致TLS 监测的地表高度精度偏低,表明近地表灌草比乔木更容易影响TLS 估算土方量的结果。3、4 号样方地表分布有砾石,利用排水法估算砾石体积的误差导致TLS 估算精度降低。7 号样方由于长期降水冲刷产生密集冲沟导致TLS 不能获取完整地形数据,通过插值法填补缺失点云数据会导致冲沟位置的高度被高估[35],从而增加估算误差。因此,地形复杂程度是影响TLS 估算土方量精度的重要因素。
而本研究中仪器扫描距离介于0~15 m,点位误差小于3 mm,配准误差为2 mm,且1~7 号样方平均高程变化为5~12 cm,故仪器绝对精度对TLS 估算精度产生的误差较小。
此前基于LiDAR 估算土方量的研究多集中于大、中尺度的滑坡、山体开采和农田土地平整等领域[2,14-15],但缺乏土方量估算精度验证。本研究以小尺度土方工程为研究对象,探究了不同地表条件下TLS 估算厘米级别土方量的适用性,明确了该方法用于土方量估算的精度范围。此外,TLS 估算土壤侵蚀量方法与土方量估算方法具有一致性。本研究可为TLS 土壤侵蚀量监测提供了一套完善的数据获取及处理流程,并明确不同地表条件下TLS 估算精度范围,通过微地形的动态监测可有效表征区域侵蚀-沉积空间分布。
3.2 TLS 野外设置的影响
TLS 测站数量及位置显著影响其获取地表信息的完整性和土方量计算精度[5]。Nouwakpo 等[27]发现利用多个测站对有树枝、树桩等障碍物分布的地表进行多视角扫描,可完整获取其地表三维数据。然而,由于不同测站的配准需求,增加测站数量会显著增大野外调查时间和成本[5,36]。因此,在确保监测精度的前提下,可通过减少测站数量的方式提高野外试验效率。Li 等[5]在利用TLS监测地表覆盖较少的石质径流小区的土壤侵蚀量时发现,3~4 个测站下的监测精度与6 个测站的结果相近。本研究发现,不同地表条件下所需的测站数量存在差异,以4 站数据结果为基准,当植被覆盖度小于1%(1、2和3 号样方)时,测站数量可减少至2 个,对于植被覆盖度为20%~30%的4、5 和6 号样方,测站数量可减少至3 个。而地形起伏较大的7 号样方,5 个测站扫描的地表数据在冲沟处仍存在点云数据缺失,因此需要增加测站数量。
在测站数量固定的条件下,测站位置也显著影响TLS计算土方量的精度(表5)。Li 等[5]在室内模拟降水条件下监测坡度较大的径流小区侵蚀的试验中,发现仪器架设高度越高,监测精度越高。原因在于仪器位置越高可避免微地形起伏造成的遮挡从而更完整地捕获地表信息。然而野外试验中,为便于观测,TLS 架设高度一般与观测者身高接近。本研究发现当仪器高度距地面1.5 m且测站个数为1 时,低地势测站计算的土方量精度要大于高地势测站。原因可能是样方坡度较小且下坡存在弧度,测站地势高,样方的下坡位置出现数据缺失,导致土方量估算误差增大。因此,测站位置的设置应综合考虑样方的地形,减少地形遮挡带来的数据缺失。当测站数量为2 个时,不同样方的最优测站位置设置存在差异,植被覆盖是影响测站位置选择的主要因素(表5)。当植被覆盖度小于1%时(1、2、3 号样方),因样方内部遮挡较少,建议选择对角线组合(S13/S24)和长边组合(S12/S34)。当植被覆盖度为20%~30%时,地表遮挡范围较大(4、5、6 号样方),选择S13/S24 对角线组合方式,能最大程度消除植被遮挡导致的土方量估算误差。3个测站组合方式中两低一高测站组合(S124、S134)估算精度略高于两高一低测站组合方式(S123、S234)。因此,TLS 测站位置影响地表三维监测精度,野外TLS测站应选择对角线方式、且地形遮挡较少的位置。
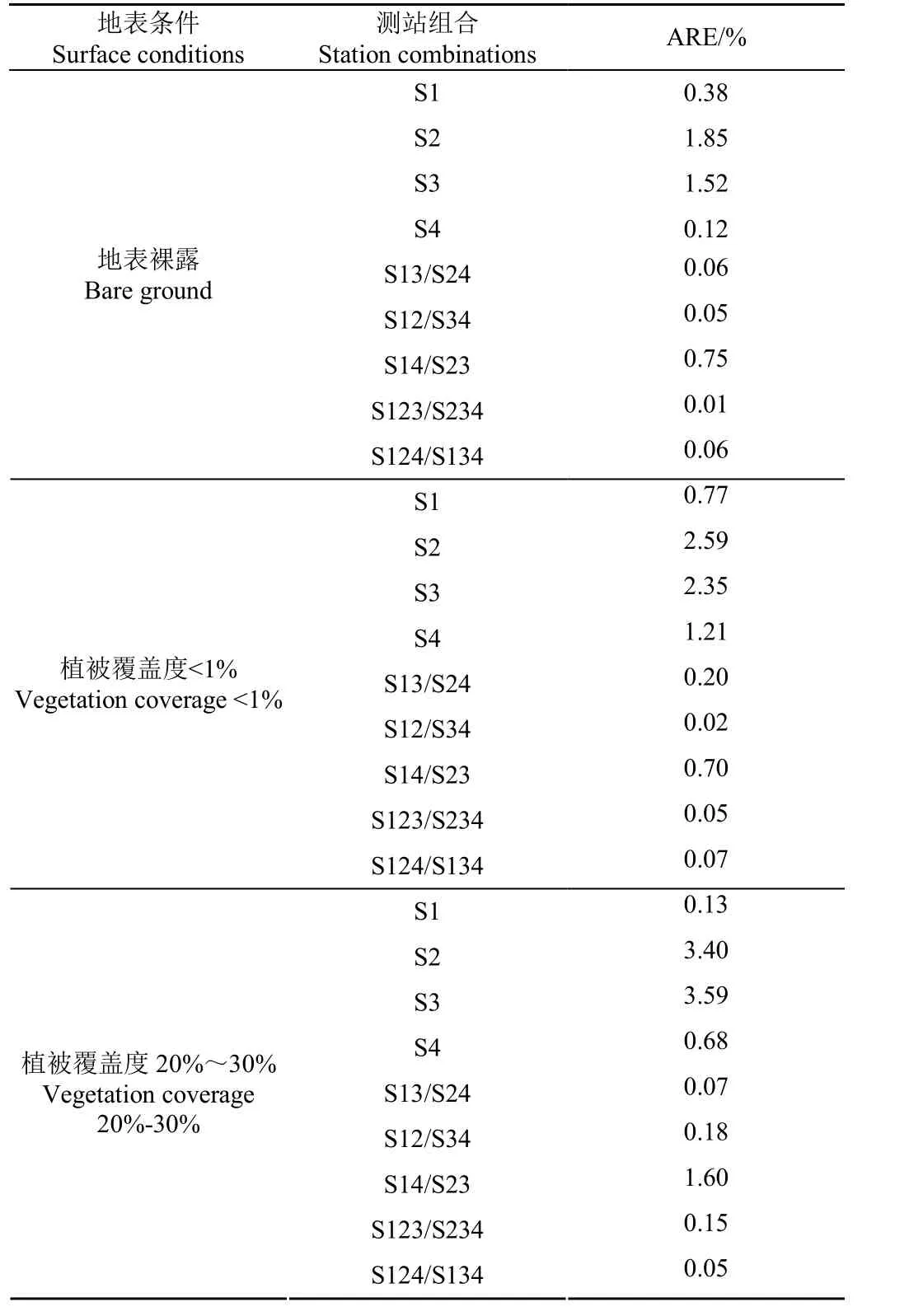
表5 不同地表条件及测站组合下土方量估算的ARETable 5 ARE of earthwork volumetric estimations under different surface conditions and scan combinations
TLS 数据点密度影响获取的地表三维信息的精度[26],进而影响土方量估算精度。郑吉林[37]在利用TLS 数据提取侵蚀沟DEM 时发现,当点间距从5 cm 增大到20 cm时,DEM 的误差呈现增大趋势。本研究结果表明,当点间距从1 cm 增大到20 cm,土方量的估算精度整体呈现降低趋势,与现有研究结果一致。由于1、3、4 和5 号样方近地表有砾石和象草覆盖,需更高的点云密度去刻画局部微地形,故最优点间距范围(1~4 cm)相比近地表无覆盖的2 和6 号样方(1~8 cm)小。因此,野外扫描点云间距的设置需考虑近地表地物遮挡的影响。
TLS 估算土方量的精度受DEM 精度限制,本研究样方点云密度较大且地表覆盖较小。针对地表遮挡较大、数据缺失严重的区域,TLS 构建DEM 的精度受到地表粗糙度、点云间距、地形特征和插值方法等多重因素的影响[21]。如何确定植被密度较大区域估算精度的主要影响因素,选择最优的TLS 野外设置仍需探究。
4 结 论
基于填/挖土前后样方实测土方量干质量数据,本研究对不同地表条件下地基激光雷达(Terrestrial Laser Scanning,TLS)计算土方量精度进行分析,综合探讨了不同测站数量、位置及点云间距对土方量计算精度的影响,结论如下:
1)TLS 计算的土方量结果与实测数据具有较好一致性,ARE 为1.69%~18.17%(RMSE=826.98 kg,rRMSE=24.25%)。不同地表条件下TLS 计算土方量估算误差由高到低分别为复杂地形、夹杂砾石、马尾松+砾石、稀疏象草、纯马尾松林、地表裸露、马尾松+象草。
2)基于TLS 计算土方量的误差随着测站数量增加而增加。以4 个测站数据计算结果为参考,单个测站扫描时,低地势位置估算精度高于高地势测站。两个测站扫描时,估算精度由高到低依次为对角线组合(S13/S24)、长边组合(S12/S34)、短边组合(S14/S23)。当植被覆盖度<1%时,野外布设时可将测站数量减少至2 个,选择对角线组合或长边组合方式进行布设。当植被覆盖度为20%~30%时,3 站点云数据可满足精度需求,但选择两低一高测站组合方式精度更优。
3)TLS 计算土方量的精度随点云间距增加而降低。以原始点云间距计算结果为参考,地表裸露的2 号及马尾松覆盖的6 号样方最优点间距为1~8 cm,其余4 个样方为1~4 cm。
本研究结果表明TLS 可适用于不同地表条件下土方量计算。测站组合及点云间距分析结果对TLS 计算土方量和土壤侵蚀量的测站布局及参数设置具有指导意义。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
测绘地理信息(2022年2期)2022-04-02
建材发展导向(2022年4期)2022-03-16
乡村科技(2021年17期)2021-10-20
安顺学院学报(2021年4期)2021-09-16
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
建材发展导向(2019年5期)2019-09-09
建材发展导向(2019年5期)2019-09-09
中国科技纵横(2016年15期)2016-12-29