
基于轮式和履带式两种行进方式的可变形轮胎*
2021-03-15 07:32韩校粉孙立明李志尊
科技创新与应用 2021年10期
韩校粉,孙立明,李志尊,王 艳
(陆军工程大学石家庄校区,河北 石家庄050003)
1 研制背景
当前主流越野车的行进方式主要有两种,分别是轮式和履带式,轮式车辆行进速度快,但是越野能力差;履带式车辆越野能力强,但是行进速度不高。例如,雪地越野车能适应雪地路段,越障能力比较强,但在平直路段上,无法提供较快的行进速度;轮式越野车在平直路段上能获得较快的速度,但极难跨越较高障碍物,越障能力不足,且在面临湿滑路段或泥泞路段时,轮胎容易打滑,甚至陷入泥潭,影响车辆的行进。针对这些轮胎存在的不足之处,提出一种可变形轮胎,它是融履带式与轮式为一体的新型轮胎,可直接装配在当前车型上,大幅度提升车辆对各种地形的适应能力。设计思路如图1 所示。

图1 可变形轮胎设计思路
2 技术路线
为圆满地完成设计任务,在研究过程中采用理论研究、三维仿真和样品制作相结合的方法,经过调研、设计、仿真、制作、检验等步骤,制作出一种可实现轮式和履带式两种行进方式的可变形越野轮胎。采取的技术路线为:广泛开展技术调研;对调研材料进行综合分析,初步确定变形方式;通过三维仿真,优化变形方式及整体结构;购买螺栓、轴、轴承、套筒等标准零件,利用快速成型设备打印构件,进行装配调试,制定使用说明书规范。该技术路线具体如图2 所示。
3 功能结构
3.1 整体结构
该轮胎主要由控制模块、传动模块、变形模块、履带式外轮胎四部分组成,如图3 所示。控制模块主要是利用电机控制动力主轴的转动,从而实现动力的输送,使轮胎运转,利用舵机带动变形模块运动,实现轮胎形状的改变;传动模块的作用是将电机主轴的运动和动力传递到轮胎上,主要是利用齿轮的啮合与分离,在动力源不变的情况下,实现轮胎整体运转和履带单独运转两种运行模式,如图4 所示;变形模块的动力由舵机提供,主要是利用齿轮连杆组合机构控制轮胎的变形,使变形前后轮胎的周长保持相等,实现最佳越障性能;履带式外轮胎在变形模块和传动模块共同的作用下,实现履带轮与履带链固化、履带轮与履带链相对运动两种状态。
3.2 控制模块
控制模块主要由单片机,电机,舵机组成。舵机的型号为MG996R 型180 度可控转角舵机,主要作用是提供动力,带动变形模块运动,实现轮胎形状的改变;单片机采用ArduinoUNO 型单片机,主要作用是控制舵机和电机的运动;电机采用的型号是33GA-365 直流减速电机,主要作用是为整个轮胎的运行提供动力。最终采用遥控实现对车轮的控制,遥控采用Arduino 自带的红外收发模块实现,通过接收不同的按键信号控制轮胎成为不同的形态。
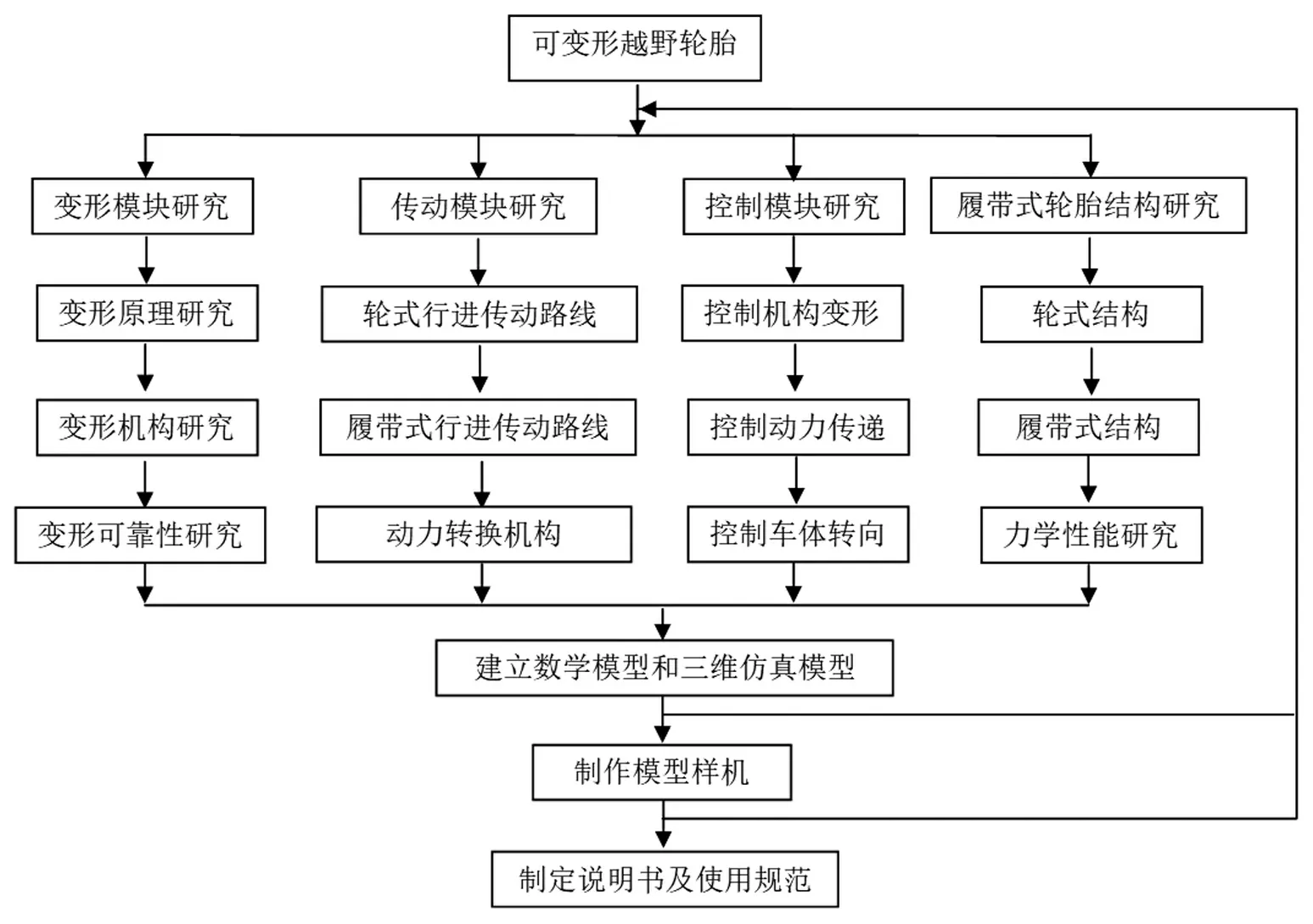
图2 可变形轮胎技术路线
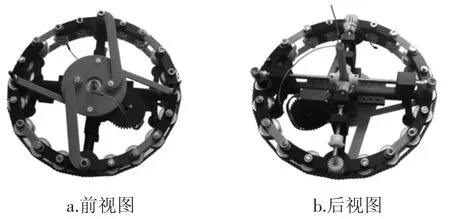
图3 可变形轮胎对应圆形形态时的立体结构模型图
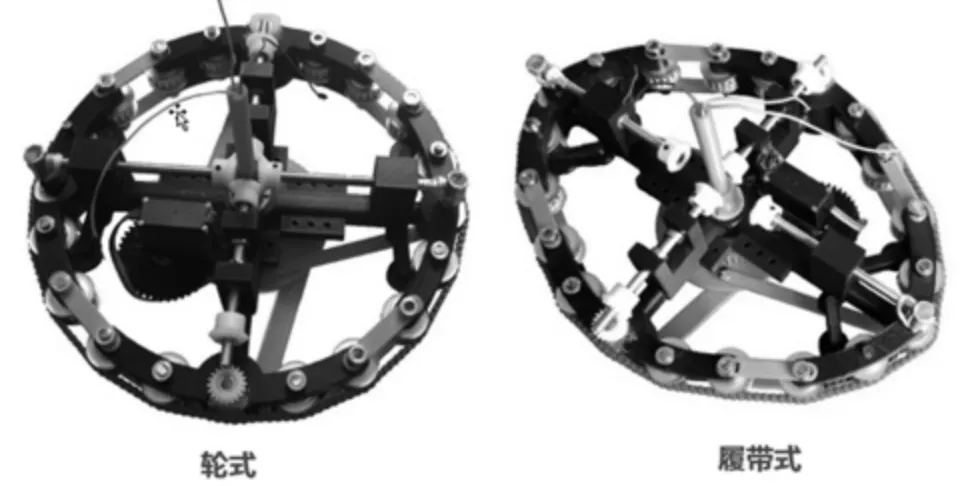
图4 可变形轮胎两种行进方式
3.3 传动模块
这一模块由中央十字轴、动力主轴、锁止齿轮轴、传动齿轮轴、主动齿轮轴五部分组成,如图5 所示。当电机提供动力时,带动动力主轴进行转动,当机构处于轮式运转状态时,传动齿轮轴与主动齿轮轴上的锥齿轮处于分离状态,切断履带轮的动力传递,传动齿轮轴、锁止齿轮轴、主动齿轮轴及动力主轴上的五个锥齿轮处于抱紧锁死状态,整个车轮以相同的速度运转;在变形机构的作用下,当机构处于履带式运行状态时,如图6 所示,锁止齿轮轴发生移动,与动力主轴上的锥齿轮脱离啮合,传动齿轮轴与主动齿轮轴上的锥齿轮啮合,此时的运动传递路线为动力主轴-传动齿轮轴-主动齿轮轴-履带链,履带链相对车体发生运转,实现履带式运转状态。
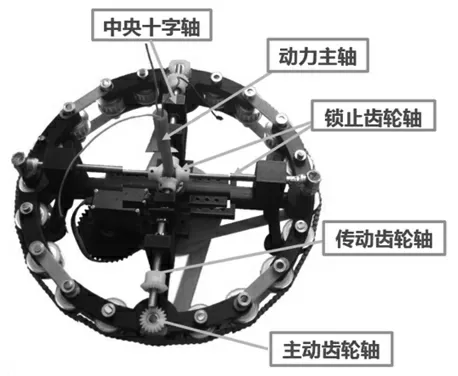
图5 可变形轮胎传动模块的组成(轮式)
3.4 变形模块
整个变形模块共包括两个曲柄滑块机构1,两个曲柄滑块机构2 和一个齿轮机构,曲柄滑块机构1 和曲柄滑块机构2 间隔90°与中央十字轴相连,相对中央十字轴做相对移动,具体结构如图7 所示。舵机齿轮和转动圆盘形成齿轮机构,缩短轴、连杆1、转动圆盘及中央十字轴形成曲柄滑块机构1,伸长轴、连杆2、转动圆盘及中央十字轴形成曲柄滑块机构2。当舵机提供动力,驱动舵机齿轮转动时,通过齿轮的啮合带动转动圆盘运转,转动圆盘相当于曲柄,通过连杆1、连杆2 分别驱动缩短轴和伸长轴相对中央十字轴做相对移动,从而实现轮胎的变形,支撑杆1 和支撑杆2 可提高变形前后轮胎的稳定性和坚固性。
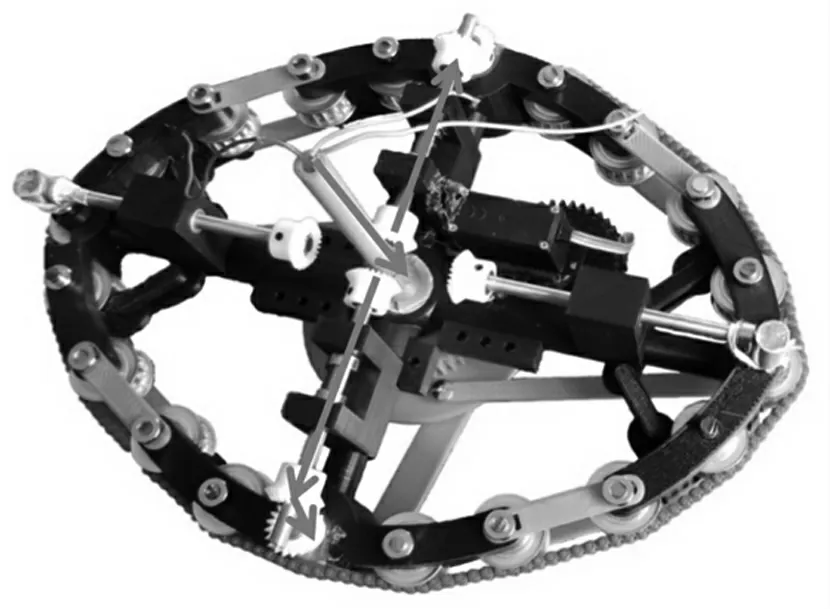
图6 可变形轮胎传动路线(履带式)
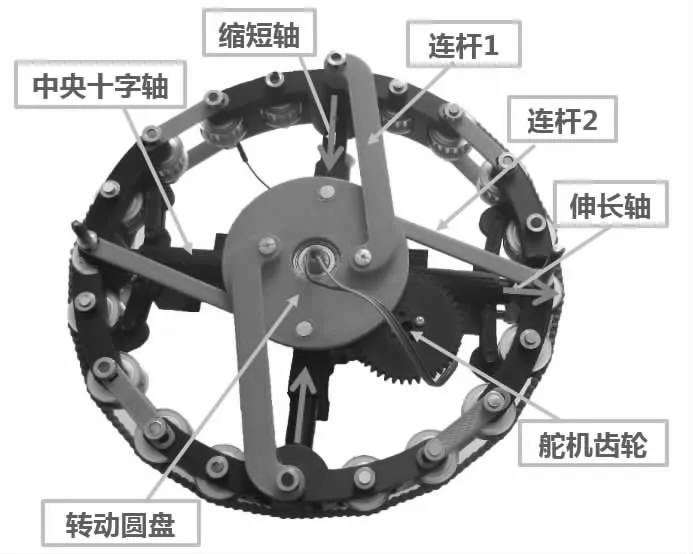
图7 可变形轮胎变形模块的组成
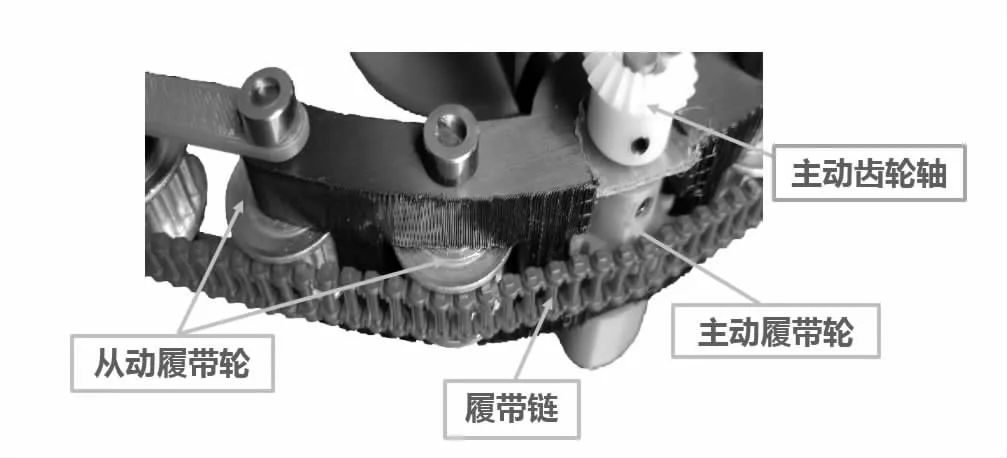
图8 可变形越野轮胎履带式外轮胎的组成
3.5 履带式外轮胎
这一模块由主动履带轮,从动履带轮及履带链及橡胶外履带(图中未显示)组成,如图8 所示。主动履带轮通过轮齿与履带链相啮合,能保证传动的平稳性,从动履带轮主要起支撑作用,在履带链的外围有一圈橡胶外履带,主要用于和地面接触,增大接触面积,提高抓地能力。当轮胎以轮式状态行进时,整个机构固化,主动履带轮与履带链没有相对运动,变形后,主动履带轮动力接通,带动履带链运动,实现履带式运行状态。
通过模型制作与实验,该模型能够初步实现所需功能,可以灵活转换运行方式,实现轮式和履带式两种行进方式。
4 创新点
该设计主要包括了三个创新点。首先,提出了一种可变形轮胎,巧妙利用周长不变的特点,实现轮式和履带式两种行进方式。其次,利用齿轮传动系统,实现变形模块与传动模块的固联,使履带与轮毂固化,同速转动。最后,通过齿轮连杆组合机构,控制轮胎的变形及传动路线的改变。
5 结束语
该可变形轮胎可提高普通越野车辆对各种地形的适应能力。在一般的平坦路面,利用齿轮传动系统,实现变形模块与传动模块的固联,使履带与轮毂固化,轮胎以轮式运转,可以获得较快的行进速度;在沙地、草地、雪地、山地等地形,通过齿轮连杆组合机构,控制轮胎的变形及传动路线的改变,轮胎以履带式运转,可以获得较好的越野能力,通过性强。该产品具有机械结构简单、变形响应快、机动性高、适应多种复杂地形等特点,可军民两用,可用于一般的车辆上,也可小型化,满足反恐、排爆、搜索、救援、侦查等任务,市场前景广阔,经济效益可观。
猜你喜欢
时代汽车(2021年16期)2021-08-23
兵器装备工程学报(2021年3期)2021-04-09
军民两用技术与产品(2021年10期)2021-03-16
中国金属通报(2020年13期)2021-01-04
商品与质量(2020年53期)2020-11-27
电力与能源系统学报·中旬刊(2019年3期)2019-09-10
科技视界(2014年6期)2014-12-24
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
