太空衍射望远镜大型桁架展开过程动力学建模
2021-03-16 09:13黄泽兵刘锦阳袁婷婷侯鹏
中国空间科学技术 2021年1期
黄泽兵,刘锦阳,*,袁婷婷,侯鹏
1. 上海交通大学 船舶海洋与建筑工程学院,上海 200240 2. 上海卫星装备研究所,上海 200240
近年来,随着深空探测技术的发展,对大口径太空衍射望远镜提出了迫切需求[1-2]。由于受到航天运载工具空间和载重的限制,发射前,太空衍射望远镜处于折叠状态,发射到太空之后在特定轨道位置释放、展开与锁定。太空衍射望远镜展开的一个关键步骤是桁架展开把主镜推送至特定位置,其展开过程直接决定了太空望远镜后续能否顺利展开与工作。然而这个展开过程呈现出复杂的动力学特性,在桁架展开过程中,各个桁架单元在锁定装置的作用下实现瞬间锁定,这将对星体与主镜产生很大的冲击,甚至会使展开机构造成一定程度的破坏,从而导致太空衍射望远镜在轨展开失败,因此进行太空衍射望远镜桁架展开动力学的研究非常有必要。
鉴于采用柔体多体系统动力学研究大型空间结构展开动力学的复杂性, 目前对大型空间结构的展开动力学与控制研究大多基于准静态或多刚体模型[3]。例如,赵孟良与关富玲[4]建立了周边桁架式可展天线的多刚体动力学模型,并采用广义逆矩阵的方法实现了考虑摩擦的周边桁架式可展天线展开动力学分析;彭笑雨等[5]利用螺旋理论对一种五面体可展桁架单元进行了自由度分析,分别采用了D-H坐标变换与拉格朗日法对五面体可展桁架单元展开过程进行了运动学与动力学分析;李海泉等[6-9]假定桁架各部件为刚体,建立了可展开桁架-帆板系统动力学模型,对桁架-帆板系统的展开进行了数值仿真与参数分析,并研究了关节间隙与摩擦对展开动力学的影响;董富祥[10]通过采用考虑绳索断裂的绳索联动轮力学模型,基于变约束方法建立了太阳翼第二次展开期间动力学方程,分析了不同位置绳索断裂失效对太阳翼各板展开角度、展开构型和其他绳索张力的影响;李团结等[11]基于Lagrange方法建立了周边桁架可展天线的动力学模型,研究了耗散力、铰链处扭簧驱动力及索网预张力对天线展开动力学的影响;李博等[12]基于Gonthier接触力模型和修正的Gonthier摩擦力模型分别计算了含间隙转动副元素之间的法向与切向接触力, 通过数值分析预测了运动副间隙对剪式线性阵列可展结构动力学性能的影响;田强等[13]采用自然坐标方法利用约束切换技术建立了变拓扑星体-伸展臂-环形桁架天线的参数化多刚体系统动力学模型。
以上研究主要采用多刚体动力学模型对可展机构进行动力学分析,对可展机构的刚-柔耦合动力学特性研究较少;此外,以上工作主要研究可展机构本身的展开动力学问题,对可展机构在展开、锁定时与卫星本体或其他附件的耦合动力学特性的分析涉及较少。而随着高分辨遥感观测技术的发展,太空衍射望远镜一方面往大口径与复杂性方向发展,展开桁架的尺度越来越大,柔性效应愈加显著,另一方面对在轨高精度展开与控制技术提出愈加严格的要求,这就需要对太空衍射望远镜桁架展开过程进行更加精确的动力学建模和分析,并对桁架展开过程中星体及附件组成的柔性多体系统的刚-柔耦合动力学特性进行系统研究,为后续动力学控制设计提供更准确的技术指导。
本文着重研究桁架展开和锁定过程中桁架各部件的弹性振动对桁架的展开速度和星体与主镜所受冲击力的影响。在动力学建模过程中,将各桁架单元的三角框和折叠臂视为柔性体,将星体和主镜都作为刚体简化处理。采用基于欧拉四元数的笛卡尔方法建立变拓扑的柔性多体系统刚-柔耦合动力学模型,在此基础上对太空衍射望远镜可展柔性桁架的展开和锁定过程进行动力学分析,研究桁架单元各柔性部件的弹性振动对系统动力学特性的影响。
1 太空衍射望远镜系统描述
如图 1所示,太空衍射望远镜主要由星体、可展开桁架及主镜等构成,主镜安装在可展桁架前端。当处于折叠状态的太空衍射望远镜发射到太空后,受自身动力源的驱动先后经过桁架直线展开、星体展开及主镜展开等阶段后展开至伞形,继而实现深空探测。本文主要研究太空衍射望远镜的第一展开阶段——桁架展开阶段。
可展桁架是太空衍射望远镜的关键部件,本文研究的太空衍射望远镜含有3根对称分布的铰接式三棱柱可展桁架,每根桁架含有11节桁架单元。如图 2所示,三棱柱可展桁架主要由三角框、折叠臂、丝杠驱动组件等构成,各活动关节采用旋转铰连接并附有锁紧机构。当三角框节点处滚柱滑入丝杠时,丝杠在电机作用下同步匀速旋转将旋转运动转化为三角框的直线运动[14],当三角框运动距离达到桁架单元长度时,关节处锁定装置作用实现桁架单元瞬间锁定,同时释放下一个三角框滚柱进入丝杠,丝杠继续驱动桁架单元向前伸展,由此交替进行实现桁架单元逐个展开。三角框节点处安装有一组限位卡夹,以避免各桁架单元展开过程中单元前、后端三角框滚柱同时滑入丝杠导致桁架单元展开失败。

图1 太空衍射望远镜结构组成Fig.1 The composition of the space diffraction telescope

图2 桁架展开过程Fig.2 The deployment of truss
为了模拟桁架单元展开到位时锁紧机构的作用,本文采用在铰链处施加与缓冲器等价力矩的方法,力矩大小参考动力学仿真软件Adams阶跃函数和双侧碰撞函数定义[15]:
ML=STEP(θ,θ1,0,θ2,1)·
(1)

2 太空衍射望远镜多体系统刚-柔耦合动力学建模
本文着重研究桁架展开时的变形效应以及对星体与主镜的冲击影响,因此将桁架所有三角框和折叠臂视为柔性体建立模型,而星体和主镜都作为刚体简化处理,当桁架单元锁定时通过在关节处施加强力矩和阻尼模拟锁定机构的作用。
为了缩减计算规模,减少系统中物体的个数,尚未进入丝杠的桁架单元不作为物体考虑。在桁架单元进入丝杠之后,在物体序列中增加该桁架单元的三角框和六根折叠臂,并施加三角框和折叠臂之间的转动铰以及三角框的各角点与丝杠之间的滑移铰。在桁架单元完成展开锁定并离开丝杠之后,再释放三角框的各角点与丝杠之间的滑移铰。在此基础上,对可展桁架机构建立变拓扑柔性多体系统动力学模型。
2.1 单柔性体动力学变分方程
对于各柔性部件,本文基于混合坐标法建立动力学模型。选定一个浮动坐标系描述物体的大范围运动,物体的弹性变形将相对该坐标系定义。弹性体相对于浮动坐标系的离散将采用有限单元法与现代模态综合分析方法,用模态坐标描述弹性变形。


图3 单柔性体Fig.3 A single flexible body


(2)


(3)

(4)


(5)


(6)

(7)
其中:
(8)
采用集中质量有限元法,设柔性体Bi的节点数为l,根据速度变分原理,物体Bi的速度变分形式的动力学变分方程为:

(9)


(10)

2.2 相邻物体之间的铰约束方程


图4 邻接物体的几何关系Fig.4 The geometric relation between a pair of bodies


(11)

(12)


(13)
在本文研究的太空衍射望远镜桁架中,三角框与丝杠之间的约束为滑移铰;三角框与折叠臂、折叠臂与折叠臂之间的约束为旋转铰,桁架与主镜、桁架与星体之间的约束为固定铰。下面推导滑移铰与旋转铰的约束方程。


(14)
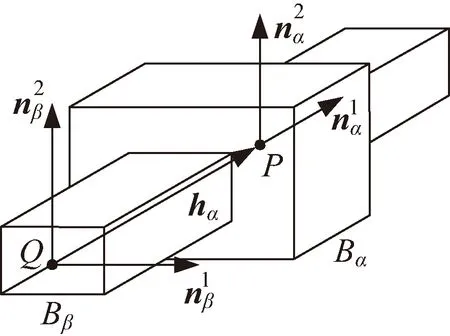
图5 滑移铰Fig.5 Tranlational joint
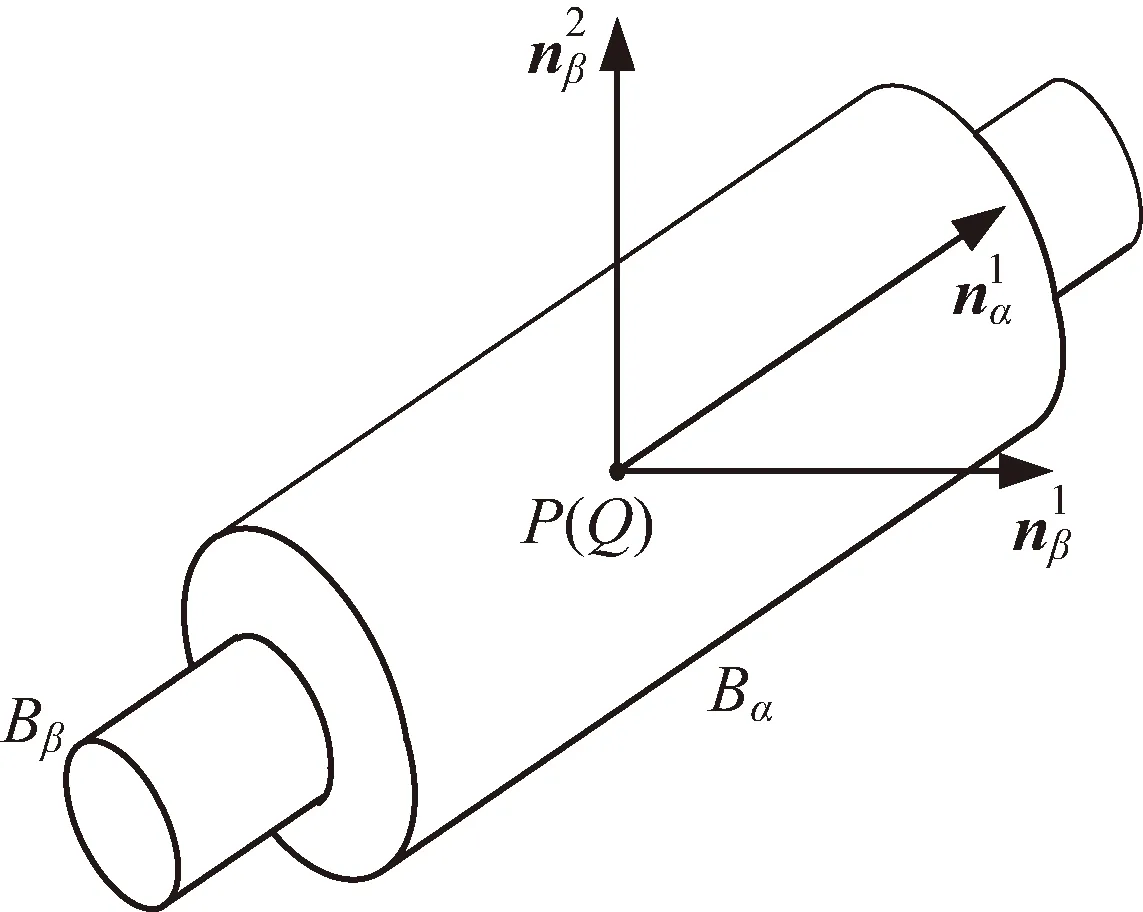
图6 旋转铰Fig.6 Revolute joint

(15)

对于刚体,只需将上述推导中涉及到的模态变形相关的项全部忽略不计,浮动坐标系转化为刚体连体坐标系,这样方程(8)变为刚体动力学变分方程,约束方程也变为刚体相关。
2.3 锁定力矩对应的广义力计算

(16)

(17)
将式(16)代入上式,锁定力偶矩作用于Bα和Bβ的广义力分别为:
(18)
为了模拟桁架单元展开到位时锁紧机构的作用,本文采用在铰链处施加与缓冲器等价力矩的方法,具体锁定力偶矩ML的表达式见式(1)。
2.4 变拓扑柔性多体系统动力学方程


(19)


(20)
(21)

(22)
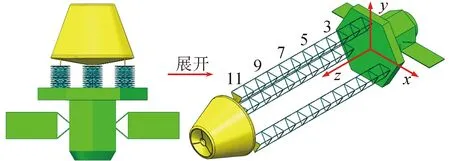
图7 太空衍射望远镜系统Fig.7 The space diffraction telescope multibody system
3 太空衍射望远镜桁架展开动力学仿真分析
在桁架展开阶段,星体在控制器作用下基本处于静止状态,因此本文将星体固定。基于上述推导的多体动力学理论,建立了如图 7所示的太空衍射望远镜系统动力学模型,物理参数如表1所示,其中三角框和折叠臂均为铝合金6061材质,星体与主镜为刚体。仿真初始状态桁架处于折叠状态,在驱动作用下逐渐展开,绝对参考系x、y和z方向如图 7所示。本文桁架展开速度为0.1245 m/s,桁架展开最后锁定时间为110 s ,总仿真时间取140 s。为了进行对比,本文分别对柔性桁架和刚性桁架模型的展开动力学进行数值仿真。
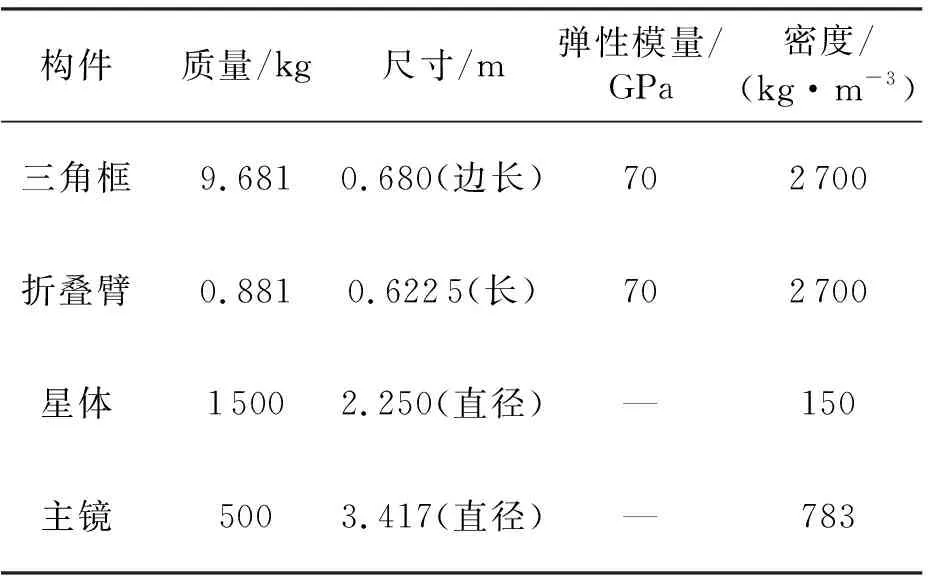
表1 系统物理参数
3.1 刚、柔性桁架展开过程对星体的冲击分析
桁架对星体z方向的冲击力如图8(a)所示。对比柔性与刚性桁架展开过程中对星体的冲击力大小,发现柔性与刚性桁架都在各个桁架单元锁定瞬间会对星体产生较大的冲击力,在各个桁架单元展开过程中对星体的冲击力较小。刚性桁架对星体的冲击有微小振荡,冲击力主要沿z的正方向,即桁架展开方向,并随着已展开锁定单元数量的增大冲击力逐渐增大,在最后一个桁架单元锁定瞬时冲击力时达到最大。而柔性桁架对星体每次的冲击都会有相对较大的振荡,与刚性桁架不同的是,柔性桁架每次对星体的冲击大小相当,没有随着已展开锁定桁架单元数量的增多而增大,原因是柔性桁架除了靠冲击碰撞消耗能量外还能通过柔性桁架各构件本身的弹性振动减弱动能,而刚性桁架只能通过冲击碰撞消耗能量。整体而言,柔性桁架相对刚性桁架对星体冲击要柔和均匀些。在桁架单元展开结束后,刚性桁架与柔性桁架对星体的冲击都基本为0,原因是系统动能在之前桁架展开过程中已基本损耗。


图8 桁架对星体与主镜z方向的冲击力Fig. 8 The impact force applied on the satellite and mirror in z direction
3.2 刚、柔性桁架展开过程对主镜的冲击分析
桁架对主镜z方向冲击力如图8(b)所示。对比了柔性与刚性桁架展开过程中对主镜的冲击力大小。可以看出,在桁架展开过程中,类似于对星体的冲击,对主镜的冲击也主要发生在各个桁架单元的锁定瞬间。刚性桁架对主镜的冲击力主要沿z的负方向,即桁架展开反方向,与对星体冲击不同的是,刚性桁架对主镜的各次冲击大小相当,没有随着已展开锁定单元数量的增多而逐渐增大;而柔性桁架对主镜的各次冲击仍会产生一定的振荡,由于冲击波在桁架中的传播,冲击力的振荡幅值呈现周期性的变化。与刚体模型相比,柔性体模型的冲击力相对较小。在桁架展开结束之后,刚性桁架与柔性桁架对主镜的冲击都基本为0。
3.3 刚、柔性桁架展开过程中三角框质心沿z方向速度对比
图9给出了柔性与刚性桁架展开过程中桁架单元1、3、5、7、9、11前端三角框质心沿z方向的速度曲线。可以看出,在桁架展开过程中,刚性桁架三角框质心沿z方向速度在相应桁架单元开始展开之后基本保持恒定,直至最后一个桁架单元锁定瞬时减为0;而柔性桁架三角框质心沿z方向速度在相应桁架单元开始展开之后并不是恒定的,会在之后的桁架单元锁定瞬间产生一定振荡,且在第一次振荡时振幅最大,之后振幅大致按正弦规律逐渐衰减,直至最后一个桁架单元锁定瞬时速度减小并向反方向振荡。在桁架展开结束后,柔性与刚性桁架各三角框质心沿z方向速度均为0。
4 结束语
本文基于笛卡尔多体动力学理论对太空衍射望远镜桁架展开过程建立了变拓扑柔性多体系统动力学模型,实现了太空衍射望远镜桁架展开动力学数值仿真。研究结果表明:
1)太空衍射望远镜柔性与刚性桁架模型展开动力学有较大差异,将桁架简化为刚体模型会与系统实际动力学特性产生较大偏差;
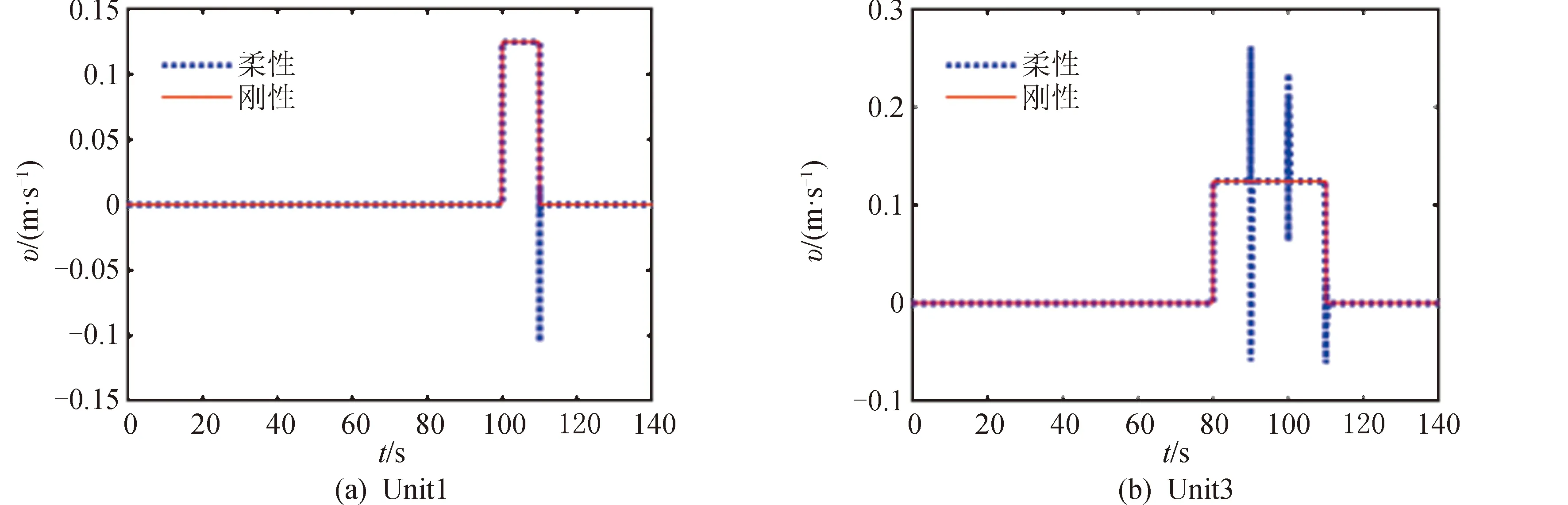
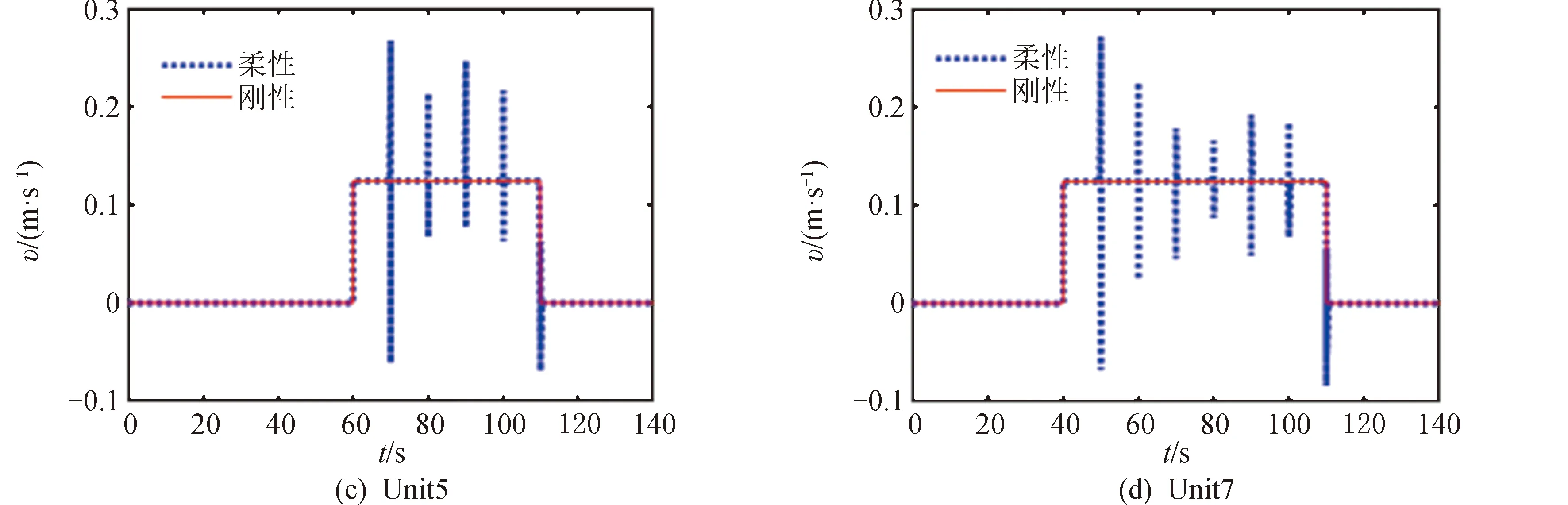
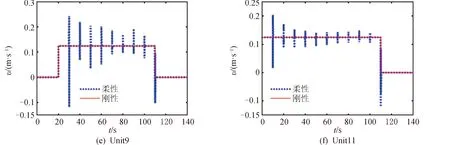
图9 桁架展开过程各三角框质心z方向速度Fig.9 The velocity of the triangular frame centroid in z direction
2)桁架各构件的柔性度可能会对展开过程产生一定的影响,保证桁架构件具有一定的柔性度可以使桁架展开过程中对星体和主镜产生的冲击较柔和。
本文建立的太空衍射望远镜桁架展开动力学模型与数值仿真结果可以对太空衍射望远镜桁架实际展开过程提供一定的技术指导,具有一定的工程参考价值。
猜你喜欢
机床与液压(2022年8期)2022-09-19
建材发展导向(2022年10期)2022-07-28
交通科技与管理(2021年13期)2021-09-10
金山(2021年3期)2021-03-24
汽车实用技术(2020年4期)2020-04-10
科技风(2019年30期)2019-11-10
小学科学(2019年9期)2019-10-18
中国建筑金属结构(2018年4期)2018-05-23
商情(2017年4期)2017-03-22
小猕猴智力画刊(2016年9期)2016-05-14