一种低轨废弃目标的捕获与回收方案
2021-03-16 09:14王立武刘安民许望晶张青斌王广兴鲁媛媛
中国空间科学技术 2021年1期
王立武,刘安民,许望晶,*,张青斌,王广兴,鲁媛媛
1. 中国航天科技集团有限公司 航天进入、减速与着陆技术实验室,北京 100094 2. 北京空间机电研究所,北京 100094 3. 国防科技大学,长沙 410073
随着空间技术的发展,国内外航天发射任务逐年增多,随之也产生了大量在轨滞留的失效航天器、空间碎片等废弃目标。目前在轨的废弃目标3.6万多个[1], 轨道上日益增多的废弃目标占用了宝贵且有效的轨道资源,必将影响和威胁人类对空间资源的可持续利用。因此及时移除轨道废弃目标是安全高效利用轨道资源的前提,尤其是低轨上的废弃目标,其分布较密集,碰撞概率也相对较高,严重影响了航天器进入空间通道的畅通[2]。目前国内外主要针对空间碎片的清除进行了相关研究[3-6],清除方式包括拖离至坟墓轨道或使之进入大气层烧毁,对废弃目标的回收涉及较少。
参照航天器回收着陆技术的定义[7],提出天基回收技术概念。天基回收技术是指在外层空间,对不具备下行能力的空间目标利用抓捕装置、离轨装置、气动减速装置或着陆缓冲装置,通过特定的控制手段,使其离轨进入大气层,进而完成气动热销毁或提供热防护以返回地球进行回收的技术。本文所提出的天基回收技术主要涉及在轨捕获技术、离轨技术以及再入返回技术等,目前这些相关技术国内外均开展单项关键技术研究,只是还未从系统上进行考虑集成整合以实现天基回收。
低轨废弃目标捕获属于空间非合作目标的抓捕[8-9]。由于空间柔性捕获具有可折叠、质量小、对控制系统要求低以及可适用于不同形状和尺寸的空间目标等特点,目前多国研究机构启动了空间柔性抓捕的研究项目[10-15]。典型的有欧空局的主动碎片移除计划(e.Deorbit),在2018年9月成功开展了世界首次真实太空环境下飞网抓捕立方星技术验证,如图1所示。

图1 e.Deorbit 在轨捕获示意Fig.1 On-orbit capture diagram of e.Deorbit
典型的离轨技术分为主动和被动两种,被动离轨是目前正在研究的新型离轨方式[16-21]。对于低轨废弃目标来说,可采用充气式增阻离轨装置(主要为阻力帆、增阻球)来使其脱离原先运行轨道进入大气层。2019年3月,欧洲在轨开展了阻力帆离轨验证,同年7月和9月,中国分别开展了“北理工一号”卫星的增阻球以及金牛座纳星阻力帆式离轨技术的在轨验证,如图2所示。

图2 充气式增阻离轨装置在轨展开示意Fig.2 The deployment of the inflatable drag-increasing device
对于再入返回来说,目前基于柔性热防护系统,出现了充气式进入减速的再入返回方式,如图3所示。国外比较著名的充气式进入减速项目有俄罗斯的IRDT项目和美国的HIAD项目等[22-24],利用火箭弹完成了亚轨道飞行试验验证。国内于2018年4月首次成功开展了60 km高度的IRDT演示验证试验,2020年5月首次开展了IRDT在轨再入返回验证尝试。

图3 IRDT再入返回装置示意Fig.3 The reentry and return device of IRDT
在空间碎片治理领域,目前国内外主要开展空间碎片主动清除研究。出于低成本、高效能清除考虑,开始涉及捕获及离轨的综合研究,但对捕获、离轨、回收一体化的天基回收研究较少。中国正向航天强国迈进,发展天基回收技术既能展示空间技术实力,也能实现空间碎片清理,更能提升空间攻防对抗能力。在目前的研究现状及技术基础上,开展天基回收技术概念、方案研究,梳理天基回收工作过程、技术途径及验证可行性具有重要的意义。
为进一步阐述天基回收技术的概念,本文以低轨废弃目标回收为研究对象,提出了一种新型组合式柔性捕获回收方案,开展了方案论证,通过动力学仿真分析对方案技术可行性进行了初步验证,以期为后续的研究提供有益的参考和借鉴。
1 捕获与回收方案设计
本文针对低轨道大型废弃目标开展了捕获与回收方案设计。低轨废弃目标的捕获与回收工作过程可以分为3个阶段,首先是对废弃目标进行在轨捕获,其次是被动离轨,最后是再入返回。再入返回时若无热防护措施,则气动销毁;若有热防护措施,可安全返回地球。本方案再入返回考虑热防护措施。
考虑空间柔性可展开装置发射时可折叠包装,使用时拉出展开或充气展开,空间、质量要求相对较小,成本低,效果好,使用方便,是未来的发展方向和趋势。因此本方案采用通过发射空间绳网抓捕低轨废弃目标,实现在轨捕获,然后利用充气式增阻离轨装置来增加平台的阻力面积,依靠大气阻力进行被动离轨,接着通过IRDT装置实现再入过程的热防护、气动减速和最终稳降和着陆。
低轨废弃目标捕获与回收系统均以收拢折叠包装方式随平台发射,入轨后捕获回收,大体可划分为以下7个步骤,如图4所示。
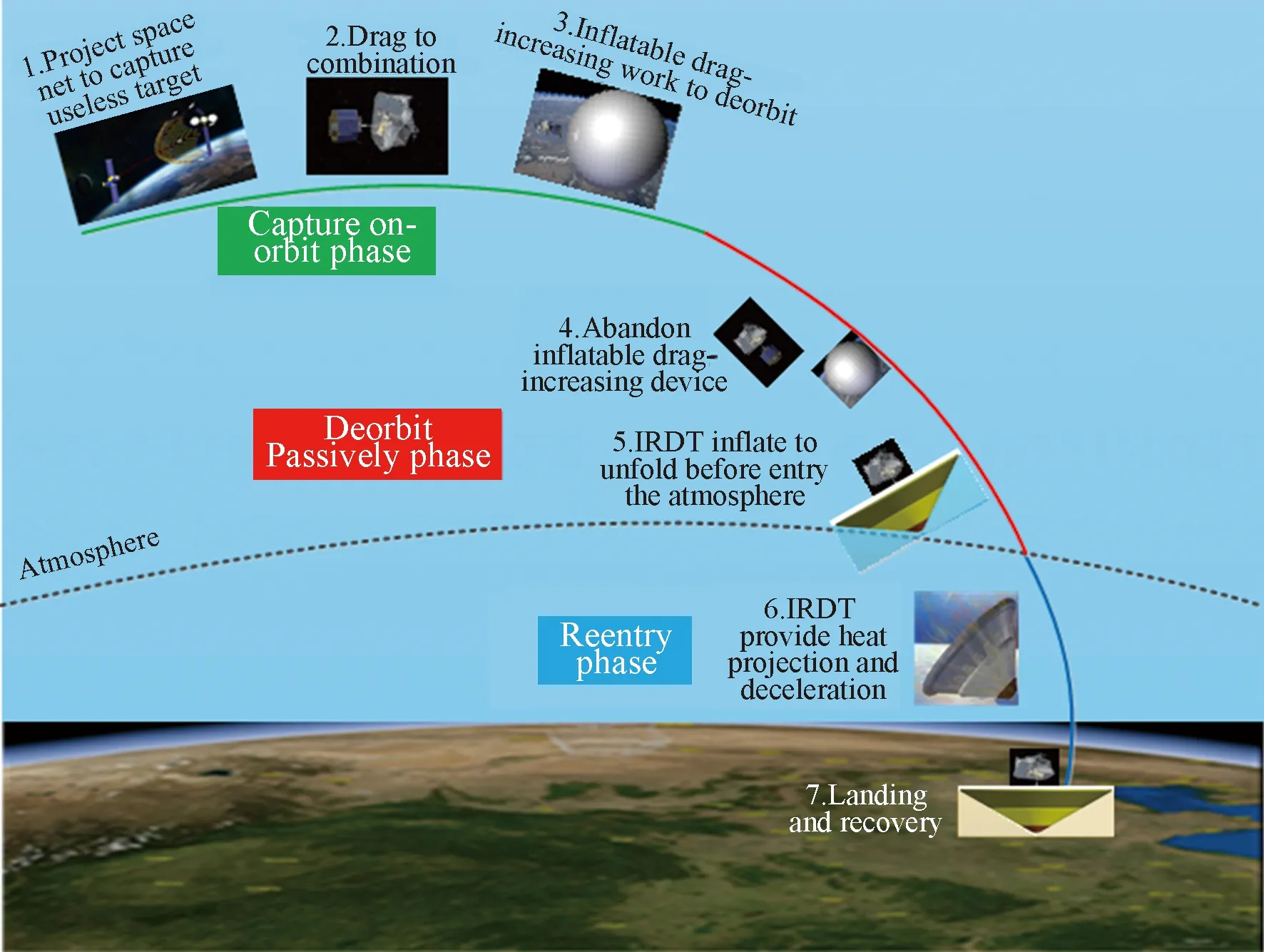
图4 回收工作程序示意Fig.4 The recovery process diagram
1)平台轨道机动靠近废弃目标,发射空间绳网,对废弃目标进行抓捕;
2)捕获目标后,对组合体姿态进行整理,形成稳定的整体;
3)充气式增阻离轨装置充气展开进行离轨操作,以不断降低轨道高度;
4)组合体在进入大气层前,抛掉充气式增阻离轨装置,为IRDT装置做好准备;
5)IRDT装置充气展开,准备进入大气层;
6)进入大气层后,通过IRDT装置进行防热、减速;
7)稳降着陆,对废弃目标进行回收。
1.1 绳网捕获方案
空间绳网采用平面四边形绳网,菱形网目,如图5所示。发射时折叠包装在网包里,工作时由发射器弹射质量块将绳网从网包中一层层有序拉出。完全拉出展开后形成具有一定面积的柔性大网,展开并向前飞行。绳网与废弃目标接触碰撞后将其包裹住,然后触发收口装置,绳网外圈绳上的收口绳收紧从而将绳网口收小,并进一步锁死以完全捕获住目标。最后通过系绳对捕获目标进行操作,稳定组合体姿态。

图5 空间绳网示意Fig.5 The space net diagram
1.2 增阻离轨方案
充气式增阻离轨装置为柔性可开展式增阻结构,使用前折叠贮存,工作时展开并膨胀,形成大的迎风面积,使任务后组合体气动阻力显著增大,如图6所示,从而迫使组合体速度降低,加快离轨速度,进而缩短轨道寿命,使其离轨再入大气层。


图6 充气式增阻离轨装置示意Fig.6 The inflatable drag-increasing deorbit device
1.3 再入返回方案
再入返回采用IRDT装置进行热防护和再入减速,IRDT装置由折叠状的耐高温柔性编织物包裹在组合体外围,形成防热罩,如图7所示。目前使用的柔性热防护材料进行了高焓风洞试验[25],在15 W/cm2的热流下,持续时间 300 s,试件表面温度超过1 300℃,冷端最高温度约112℃,可满足热防护要求。

图7 IRDT装置示意Fig.7 The IRDT device diagram
其发射时折叠包装,进入大气层前,防热罩充气形成倒锥外形,包裹着组合体以免被剧烈的气动加热烧毁和承受气动力载荷,并有效地进行气动减速,当下降到一定高度后,还可根据需要进行二次展开以提供更大的阻力,做进一步减速,确保组合体以可接受的安全速度着陆。
2 动力学模型
如上文所述,本文假定在轨捕获回收的低轨道废弃目标质量为1 000 kg,柔性绳网的名义展开面积为1 600 m2,增阻离轨充气展开后直径为10 m,采用 IRDT装置半锥角为60°,展开后直径为9 m,以此建立动力学模型。
2.1 绳网捕获类型


(1)
对于4个质量块,还需在式(1)上加上其质量ms。
在建模过程中,首先将绳索划分成若干个有限绳段单元,将绳段单元等效成“弹簧”和“阻尼器”单元组合,即质量-半阻尼弹簧模型,模型如图8所示,绳段单元n的刚度用kn表示,阻尼系数用cn表示,绳段单元n的结点坐标分别用xn、yn、zn表示。

图8 绳索质量-半弹簧阻尼模型示意Fig.8 The mass & semi-linear springs and dampers model of the space net
绳网点i的动力学方程都可以在地心惯性系N下表示为:

(2)

柔性体的碰撞与滑动过程属于边界条件非线性问题。在空间柔性捕获任务中,绳索不可避免地会与目标发生碰撞接触。基于Hertz接触理论的碰撞力计算方法,进行了捕获目标的动力学分析,如图 9所示。绳网展开后在约3 s时间内完成目标捕获,其中上方为轴向视图,下方为侧向视图,可以看出绳网在展开捕获过程中的外形变化情况。

图9 绳网展开与捕获过程的动力学仿真结果Fig.9 The deployment and capture dynamic simulation of space net system
2.2 离轨及再入模型
离轨阶段主要由充气式柔性展开结构增大组合体的气动阻力而降低轨道速度,利用软件中的高精度轨道外推模型(HPOP)中的大气模型可以精确计算大气阻力摄动,从而可以用来对低轨道的飞行器轨道预测。气动力项由以下公式估算:

(3)
式中:D为阻力;L为升力;ρ为大气密度;CD、CL分别为与组合体攻角有关的阻力系数、升力系数;A为增阻离轨装置充气展开的有效面积;m为组合体总质量。
当增阻离轨装置充气展开时阻力系数取2.2、面质比A/m取0.5 kg/m2,即返回有效载荷1 kg需要充气展开面积为0.5 m2。离轨过程中大气密度也随轨道高度降低而改变,可以用指数大气密度模型描述:

(4)
式中:ρ0为海平面大气密度;r为组合体地心距;r0为地球平均半径;hs为地球大气密度标高,标高与大气类型及距离地球表面高度有关。
经过增阻离轨后组合体轨道降低到120 km,在该高度下任何航天器都可以自主迅速地衰减到大气层。进入大气层前IRDT装置充气展开,利用该装置进行再入返回的隔热及减速。组合体离轨及再入三自由度运动模型如下:
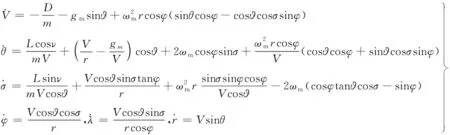
(5)
其中,位置用地心距r、经度λ、纬度Φ这3个参数来描述;速度用速度大小V、速度倾角ϑ、速度偏角σ这3个参数来确定, 速度倾角定义为速度矢量与当地水平面的夹角,速度矢量指向水平面上方为正,速度偏角定义为速度矢量在当地水平面投影与正北方向的夹角,从正北方向到速度矢量为顺时针旋转时为正;gm为地球重力加速度;ν为倾侧角,表示升力方向与包含速度矢量的铅垂面之间的夹角, 从组合体尾部向前看,若升力方向向右倾斜,则倾侧角为正;ωm=7.292×10-5rad/s为地球自转角速度。
3 仿真结果
基于第2节建立的动力学模型,对捕捉废弃目标后的组合体的离轨及再入情况分别进行了仿真,设其初始轨道为高度350 km的圆形轨道(国际空间站轨道高度),再入点高度为120 km。利用软件中高精度轨道外推模型(HPOP)计算组合体在低轨道从离轨点到再入点的轨道高度随时间的变化。离轨过程中主要作用力考虑气动阻力和太阳辐射阻力,太阳辐射系数为1,大气模型采用NRLMSISE2000,大气阻力系数设置为2.2,面质比为0.5 m2/kg。
有无增阻离轨设置的仿真对比如图10所示。图10表明,在低轨道运行的飞行器可以自主的发生离轨,逐渐向大气层衰减,但是自然衰降过程极其漫长。而增加了相应的充气增阻装置后,轨道可以在二十几个小时内迅速降低至再入轨道高度。

图10 离轨阶段高度-时间变化Fig.10 The relationship between altitude and time during deorbit stage
经过离轨阶段后,组合体轨道高度衰减到120 km位置,经过调整后展开IRDT装置,进行再入返回阶段。利用第2节的再入模型,初始状态设置如表1所示。

表1 再入阶段初始状态参数
图11给出了高度和速度随时间变化曲线。从图11可以看出约900 s落地,落地速度约为20 m/s。从仿真结果看,低轨废弃目标的捕获与回收方案可行。


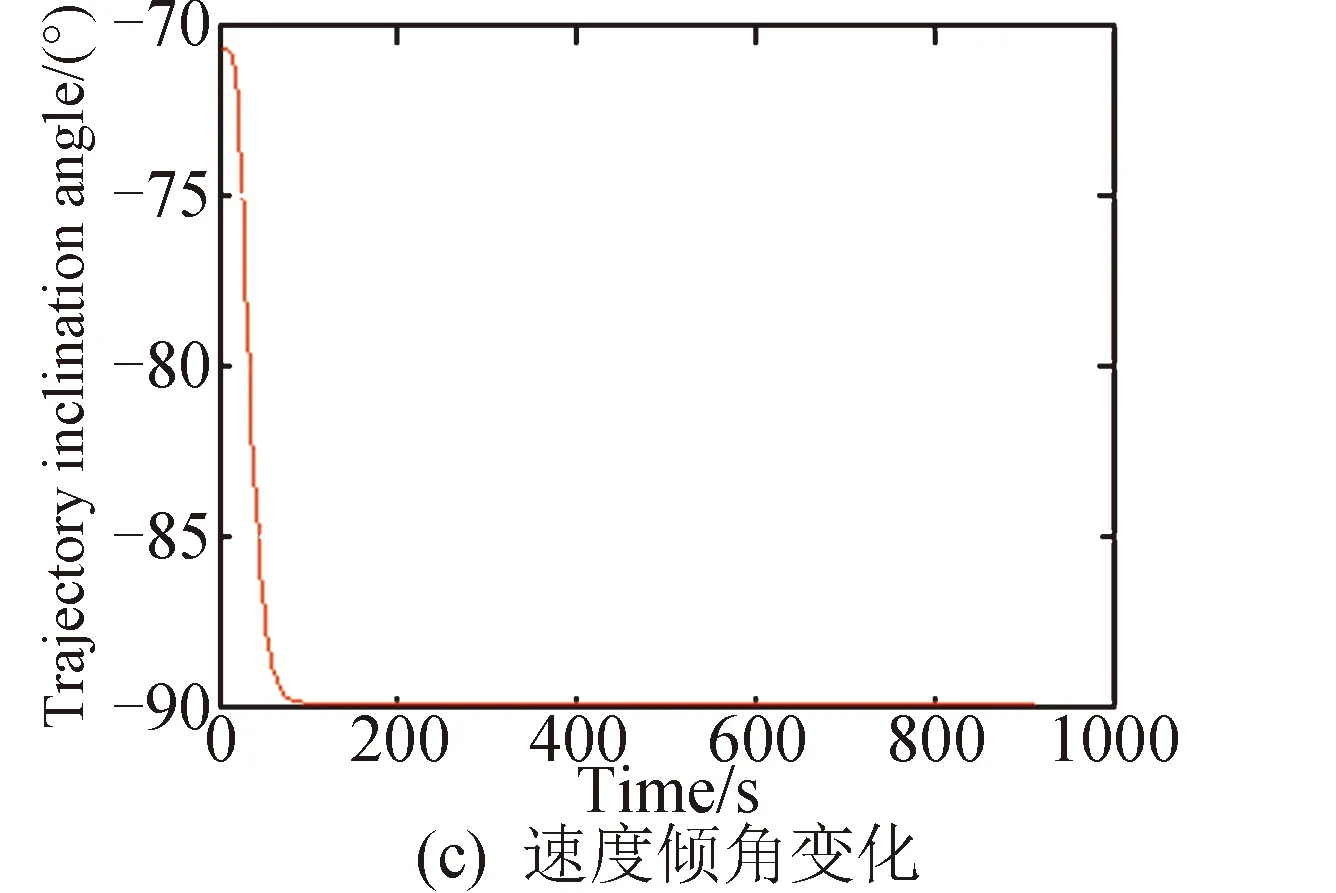
图11 再入阶段仿真结果Fig.11 The simulation results of the reentry stage
4 结束语
1)本文针对低轨道大型废弃目标回收的国际难点,基于天基回收技术概念,结合目前的技术途径对比,提出了一种新型组合式柔性捕获回收方案。其空间、质量要求相对较小,成本低,具有一定的优势。
2)针对1 000 kg的低轨废弃目标的捕获回收,梳理了工作过程,开展了初步的方案设计,建立了动力学模型,进行了仿真分析。根据仿真计算结果,捕获回收方案在技术上可行。
3)本文目前只是对低轨废弃目标捕获回收关键工作阶段进行了研究和分析,后续需进一步开展天基回收全流程分析,梳理出全链路的关键技术,识别、提炼不同工作过程的技术指标匹配性,为未来空间目标捕获和回收的研究工作提供参考。
猜你喜欢
军事文摘(2022年17期)2022-09-24
汽车实用技术(2022年5期)2022-04-02
国际太空(2022年1期)2022-03-09
国际太空(2022年1期)2022-03-09
上海船舶运输科学研究所学报(2021年2期)2021-10-12
疯狂英语·读写版(2021年8期)2021-09-17
环球时报(2020-12-15)2020-12-15
作文周刊·小学一年级版(2020年8期)2020-05-11
中学课程辅导·教育科研(2019年3期)2019-09-10
计算机时代(2016年12期)2017-01-14