基于可拓自抗扰的ECHBPS商用车横向稳定控制
2021-03-16 01:48江浩斌尹晨辉花逸峰
江苏大学学报(自然科学版) 2021年2期
江浩斌, 朱 宸, 唐 斌, 尹晨辉, 花逸峰, 谢 军
(1. 江苏大学 汽车与交通工程学院, 江苏 镇江 212013; 2. 江苏罡阳转向系统有限公司, 江苏 泰州 225318)
汽车在行驶过程中,容易受到突然的外界干扰,比如路面颠簸或者侧向风,之后容易造成车辆失稳并发生危险.车辆在行驶过程中实际横摆角速度接近期望值的时候,行驶稳定性较强,而当偏离期望值的时候,容易发生失稳.所以,文中以期望横摆角速度为目标值,以实际横摆角速度和期望横摆角速度的偏差作反馈控制,来跟踪期望横摆角速度,使车辆保持稳定行驶.
国内外学者对车辆横向稳定性控制进行了相关研究.REN B. T.等[1]通过主动前转向和电动机转矩分配,设计了一种模型预测控制器,使车辆沿所需状态稳定,同时拒绝打滑并满足其物理约束.HOU R. F.等[2]提出了一种分层的电子转向控制的策略,其上层控制器基于路面附着力的影响,实现了直接横摇力矩控制中的偏航率和侧滑角的自适应控制;下层控制器设计为两层结构,可自适应地改变转矩分配算法,根据路面附着系数实现各轮转矩的不同权重控制.J. LEE等[3]和J. CHOI等[4]设计了EPS和差动制动的协调控制系统,用于紧急情况下的驾驶辅助,帮助驾驶员避免危险,实现车道保持和车辆避撞.张恒等[5]针对电动汽车转向时的稳定性问题,以双轮毂电动机电动汽车为研究对象,利用线性二自由度车辆模型得到理想参数,提出了基于横摆角速度的终端滑模横摆力矩控制.陈无畏等[6]基于功能分配原理对EPS,ESP控制输出量进行功能协调分配,采用模糊控制策略对EPS与ESP的功能分配系数进行优化选择,进一步提高了整车全局控制性能,明显改善了汽车行驶时的操纵安全性和侧向稳定性.周兵等[7]构建基于扩展卡尔曼滤波算法的轮胎侧向力观测器,根据得到的轮胎侧向力估计值对转向盘力矩突变进行补偿,实现了车辆状态估计与车辆控制的结合.任晓光等[8]基于卡尔曼滤波算法设计电动机负载转矩估计,以此为基础确定突变力矩补偿控制电流,使紧急转向产生的转向盘突变力矩衰减.以上研究都能够较好地控制车辆稳定性,但是考虑到商用车相比与乘用车的复杂性,控制方法不一定适用商用车转向系统,只有对于具体问题进行研究,才能更好提高商用车行驶横向稳定性.商用车相比乘用车有体积更大,车身高度更高,前轴载荷更大的特点,在转向过程中车辆容易发生动态失稳,所以对于商用车的横向控制非常有必要.混合动力电控转向系统(electronically controlled hybrid power steering system,ECHBPS)是在传统液压助力转向系统的基础上加一套电动管柱,并将电动助力转向系统耦合在液压助力转向系统的前端,构成的混合动力电控转向系统.该系统不仅在节能上有显著提升[9],实现了助力手感随速可调的基础功能,同时也实现了主动回正、防侧风抗干扰的辅助功能.电动助力子系统的加入为重型商用车的辅助驾驶功能开发提供了平台,并且通过该系统电动机的功能开发可以使得汽车操纵稳定性及安全性、舒适性能有较大提高[10].车辆在行驶过程中发生失稳,通过转向系统有两种调节方法,一种是对转向盘角度的控制,另一种是对转向盘力矩的调整.在危险的时刻,控制转向盘角度可能造成手感的瞬间变差,而通过转向盘转矩控制是在转向盘上施加一个补偿力矩,使得车辆远离危险趋势,并能够让转向盘手感更加柔和.文中选择转向盘手力矩补偿控制方法.
传统控制系统对于非线性系统控制效果不是很理想,在特殊工况下控制效果不能达到要求.文中拟设计可拓自抗扰控制器,针对非线性系统的特殊性,利用自抗扰控制器的非线性组合可对该系统更好地控制;并且在传统自抗扰控制系统上,结合可拓学原理进行改良,设计可拓自抗扰控制器,并对控制器控制效果进行验证.
1 转向系统与车辆动力学建模分析
1.1 转向机构建模
混合动力电控转向系统动力学系统结构如图1所示,由机械部分、液压助力子系统、电动助力子系统构成.

图1 ECHBPS动力学系统结构图
1.1.1 转向器机械部分建模
图2为扭杆系统示意图.
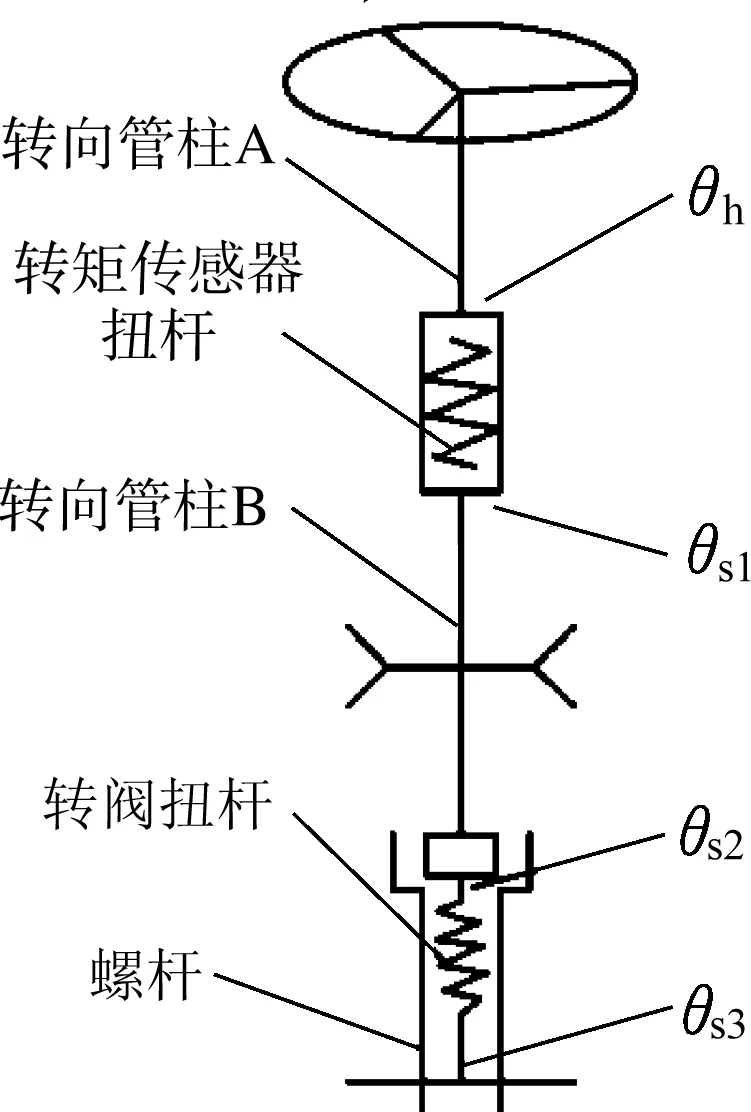
图2 扭杆系统示意图
根据力矩与转角关系、位移相对关系,建立转向管柱和扭杆模型,计算式为
(1)
式中:Th为转向盘输入转矩;Ts1为转矩传感器扭杆传递转矩;θh为转向盘转角;Js1为转向盘-转向管柱A的等效转动惯量;Bs1为转向管柱A转动黏性阻尼系数;Ks1、θs1为转矩传感器的扭杆刚度和末端转角;Ts2为HPS扭杆传递转矩;TL为助力矩耦合装置向螺杆传递的转矩;θs2为转向器输入端转角,且θs2=θs1;Js2、Bs2为转向管柱B的等效转动惯量和转动黏性阻尼系数;θs3、Ks2为转阀扭杆末端转角和刚度;α4为助力矩耦合装置接合时转阀扭杆相对转角(助力矩耦合装置工作角度);FL、ML、ηL、P为螺杆-螺母传动副中螺母受到的轴向力、螺杆传递的转矩、传动效率和导程;ms、Xs、Bs为螺母质量、位移和阻尼系数;dh为液压油缸缸径;Fcs为齿扇受到的力;Fz为液压助力;Δp为液压缸两腔压差.
1.1.2 转向器液压子助力系统建模
动力缸流量模型中的转阀模型见图3.其中Q1、Q2为进入转阀阀口的流量;Q3、Q4为从转阀流出进入油箱的流量;QL1、QL2为转阀流入液压缸左、右腔的流量;p1、p2为液压助力缸左、右腔的压力;ps为转阀入口压力.
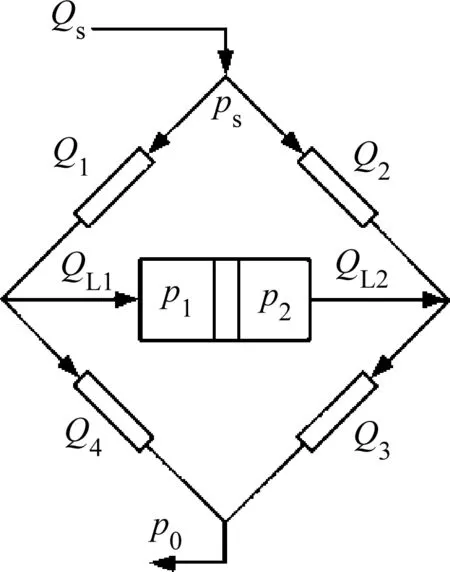
图3 转阀模型
将阀芯中位附近线性化,根据图3可得
(2)
其中:
k=2CdSk/(Qsρ),
式中:Sk为转阀中位时阀口开口面积;S1、S2为转阀开口面积;ρ为液压油密度;Cd为短孔流量系数.
建立阀口模型.转阀从中位到完全关闭经过3个阶段,如图4所示.

图4 阀口关闭3个阶段坡口示意图
设Sj为转阀节流面积,由图4可见,3个阶段如下: ① 预开间隙闭合前,转阀阀套相对于阀芯转过的角度Φ范围为0~γ1,则
Sj=(W2-W1)(E1-πRΦ/180)+
(3)
② 预开间隙闭合过程中,Φ范围为γ1~γ2,只有第1道坡口节流,则
Sj=W1(R-L2/cosφ2);
(4)
③ 预开间隙闭合后,Φ范围为γ2~γ3,只有第2道坡口节流,则
Sj=W1(R-L3/cosφ3).
(5)
1.1.3 建立转向器电动助力子系统模型
电动机模型为
(6)
式中:Km为电磁转矩系数;Im为助力电动机电流;U为助力电动机输入电压;Kv为反电动势系数;Rm、Lm为电枢的电阻、电感.
减速机构模型为
(7)
式中:Jm、Bm、θm、Tm为助力电动机转动惯量、阻尼系数、转角、额定转矩;Ta为耦合到转向管柱上的电动助力矩;iw为涡轮蜗杆传动比.
1.2 汽车动力学建模
车辆动力学二自由度模型见图5.

图5 二自由度参考模型
由图5可得微分方程为
(8)
从而有
(9)
由此可得理想横摆角速度为
(10)
式中:m为汽车质量;a、b为前轮、后轮到质心的距离;Jz为汽车绕Z轴的转动惯量;β为车身的侧偏角;δ为前轮转角;ωr为汽车横摆角速度;k1、k2为前轮、后轮侧偏刚度;v为汽车行驶速度.
2 控制策略
2.1 转矩补偿反馈控制
图6是混合动力电控转向系统的转向稳定控制器的控制逻辑,将期望稳态横摆角速度和整车模型输出实际横摆角速度的误差进行闭环控制,控制器输出补偿电流并和助力电流一起输入到混合动力转向器中对目标电流进行闭环控制.

图6 车辆横向控制系统逻辑图
2.2 可拓自抗扰控制器设计
可拓自抗扰控制器是一种自抗扰控制融合可拓算法的改进算法,由可拓自抗扰上层决策控制器和下层可拓执行控制器组成,而可拓自抗扰控制逻辑如图7所示.

图7 可拓自抗扰控制逻辑
2.2.1 特征量提取

2.2.2 特征模式识别,平面划分


图8 特征平面划分图
2.2.3 关联函数计算

(11)

在不同的特征模式下,其特征关联函数对应不同的特诊状态也不同,k1、k2分别为不同模式下的相应加权向量值.当实际特征平面上的点对于原点的位置偏离较远的时候,说明状态有失稳趋势,此时加权量选取较大的负值,相反的情况下取值较小.
2.2.4 测度模式及其控制策略
M1时系统处于经典域,车辆状态处于稳定,所以控制器控制模式不变,采用自抗扰控制.
M2时系统处于可拓域位置,此时车辆状态特征函数已经从经典域变到可拓域,车辆稳定性控制能力较差,需要改变控制量输出值,能够让控制量提升控制能力,使其特征关联函数值能够从可拓域重新回归经典域,使车辆重新进入稳定状态.设置控制器输出为
u(t)=y(t)/k+KciK(S)(-sgne)+ε,
(12)
式中:u(t)为上一个时刻控制器的输出;k为控制过程的静态增益;Kci为测度模式的控制系数;K(S)为上面求得的特征状态关联函数;sgne为偏差符号函数;ε为小数值修正量.
M3时系统处于非域内,车辆状态处于非常不稳定的状态,此时控制器输出最大幅值um,能够在这样的控制状态下将车辆带回稳定状态.
所以综上来看,可拓自抗扰力矩补偿控制器的输出为
(13)
2.3 自抗扰控制部分

上述二阶自抗扰逻辑如图9所示的,下面介绍各个模块的原理作用以及具体算法.

图9 传统二阶自抗扰控制器逻辑
2.3.1 跟踪微分器
输入控制目标信号e(t),则输出信号ea(t)和eb(t),ea(t)实时跟踪v(t),eb(t)是过渡信号ea(t)的微分.
(14)
式中:r为控制器可调跟踪速度参数又称为速度因子;h0为滤波效果参数又称为滤波因子;fhan(x1,x2,r,h)为最速综合函数,其计算式为
fhan(x1,x2,r,h)=-r(a/d-sgna)ca-rsgna,

2.3.2 非线性状态误差反馈
偏差和偏差微分信号与反馈的误差值得到的两组变量为非线性状态误差的输出量,并且非线性状态误差反馈对状态误差进行非线性组合得到非线性组合如下:
u0=kafal(e1,α1,δ0)+kbfal(e2,α2,δ0),
(15)
式中:e1=ea-z1;e2=eb-z2;而fal函数为
(16)
因此,该模块的待定参数为ka、kb以及α1、α2和δ0,其中0≤α1≤1≤α2,取α1=0.25,α2=1.5,δ0=0.02.
2.3.3 扩张状态观测器
传统构造状态观测器需要知道模型信息,当有外部信息干扰时,就加入新的状态变量,构成扩张状态观测器,即为
(17)
该模块的待定参数为β01、β02、β03以及α01、α02和δ,其中,α01=0.5,α02=0.25,δ=0.1.
3 仿真验证

为了提高控制的精确性,使用闭环控制中的双移线工况,控制转向盘转角,利用Trucksim和Simulink联合仿真的模型设置车速v=70 km·h-1,转向盘在0 s、0.2 Hz的正弦转向角输入,转向角输入如图10所示.

图10 转向盘转角曲线
以横摆角速度响应信号作为评价标准,对比两种控制方法以及无控制状态下的值,路面附着系数选为0.85,仿真效果如图11、12所示.

图11 正弦工况下横摆角速度曲线

图12 正弦工况下质心侧偏角曲线
图11显示了在转向盘输入角为正弦信号形况下的横摆角速度信号值,由图中曲线看出在没有控制情况下的车辆横摆角速度对比理想二自由度模型下的理想横摆角速度有较大偏差,而在对横摆角速度跟踪控制的情况下,对比传统自抗扰控制,文中采用的可拓自抗扰控制对横摆角速度的控制效果更好,其横摆角速度更加接近由二自由度模型得出的理想横摆角速度信号值.
同样设置在闭环控制下,选取双移线工况,闭环仿真中的车辆按照设定路线行进,并比较不同控制效果与没有控制下的横摆角速度信号值,仿真结果如图14、15所示.
闭环控制双移线工况,是检测车辆行驶稳定性的重要工况,仿真在70 km·h-1的条件下进行,从中可以看出在无控制条件下的横摆角速度值和质心侧偏角值偏离理想横摆角速度较大,车辆容易发生失稳,而在两种有控制状态下车辆的横摆角速度值和质心侧偏角值接近于理想值,而相比传统自抗扰控制,改进后的可拓自抗扰控制器能够使控制量横摆角速度更接近理想值,在车辆将要失稳的时刻补偿力矩,从而使得车辆能够在更好稳定状态下行驶或者转向.

图13 横纵向位移目标曲线

图14 双移线工况下横摆角速度曲线

图15 双移线工况下质心侧偏角曲线
4 结 论
1) 文中得出有控制状态下的横摆角速度值更加接近理想值,对于车辆在行驶过程中受到干扰,或者转向过程中出现失稳状态能够迅速调整手力矩以达到预防车辆发生危险的目标.
2) 在原有的控制基础上对自抗扰控制进行优化,能够更好地使车辆稳定行驶,同时也能预防突发状况导致的失稳情况,控制效果更优.
猜你喜欢
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
防爆电机(2021年5期)2021-11-04
新视线·建筑与电力(2021年2期)2021-09-10
直升机技术(2020年2期)2020-06-16
导航与控制(2019年2期)2019-06-12
中学课程辅导·教师通讯(2018年10期)2018-09-04
电机与控制学报(2018年9期)2018-05-14
中学生数理化·高一版(2017年3期)2017-07-08