
基于LabVIEW的伺服电机测控系统设计*
2021-03-18 06:41张日红朱立学杨松夏
机械工程与自动化 2021年1期
张日红,朱立学,杨松夏
(仲恺农业工程学院 机电工程学院,广东 广州 510225)
0 引言
由于伺服电机的精度高、高速性能好、适应性强以及运行稳定等优点,因而得到众多科研人员的青睐。在机械运动控制研究领域中,伺服驱动控制是一个非常重要的研究课题,也是一个非常综合性的研究课题,其普遍应用于自动化CNC数控设备、自动化仪表车床、纺织业以及生产加工与制造进程控制系统中,它关系到机械电子工程、自动化控制以及计算机技术等学科[1-3]。与此同时,随着电子计算机应用技术的高速发展,使得虚拟仪器也逐渐得到学术界和工业界的认同及推广。伴随着运动控制卡等一系列硬件的开发,在众多领域的研究、制造和开发中,LabVIEW虚拟仪器测控程序得到了非常广泛的应用,通过LabVIEW编程语言调用运动控制卡的内置函数对系统进行高精度的控制是全新的控制方案。运用LabVIEW编程语言进行由运动控制卡、伺服电机及其驱动器所组成的单轴或多轴伺服控制系统开发具备系统调试方便、稳定性高等优点[4,5]。
1 伺服电机控制系统的硬件配置
图1为单个伺服电机控制的硬件接线示意图。硬件系统由ECMA-C20602SS伺服电机、ASD-B2-0221-B伺服驱动器、PCI-1245运动控制卡、ADAM-3952接线端子板、24 V直流电源和电脑等组成[6]。AC220 V电源为伺服驱动器的主要电路和控制回路供电,伺服电机的动力线需接入到伺服驱动器的U、V、W接线端,伺服电机的编码器信号线与伺服驱动器的CN2口直连。伺服驱动器上的CN1接口的控制与检测信号要对应接入到接线端子板ADAM-3952上。接线端子板ADAM-3952通过信号电缆PCL-10251接入到电脑PCI插槽上的运动控制卡PCI-1245。电机的刹车线(棕和蓝)必须接24 V电源,否则电机无法运转。ADAM-3952接线端子板控制与检测信号的配置情况如图2所示。
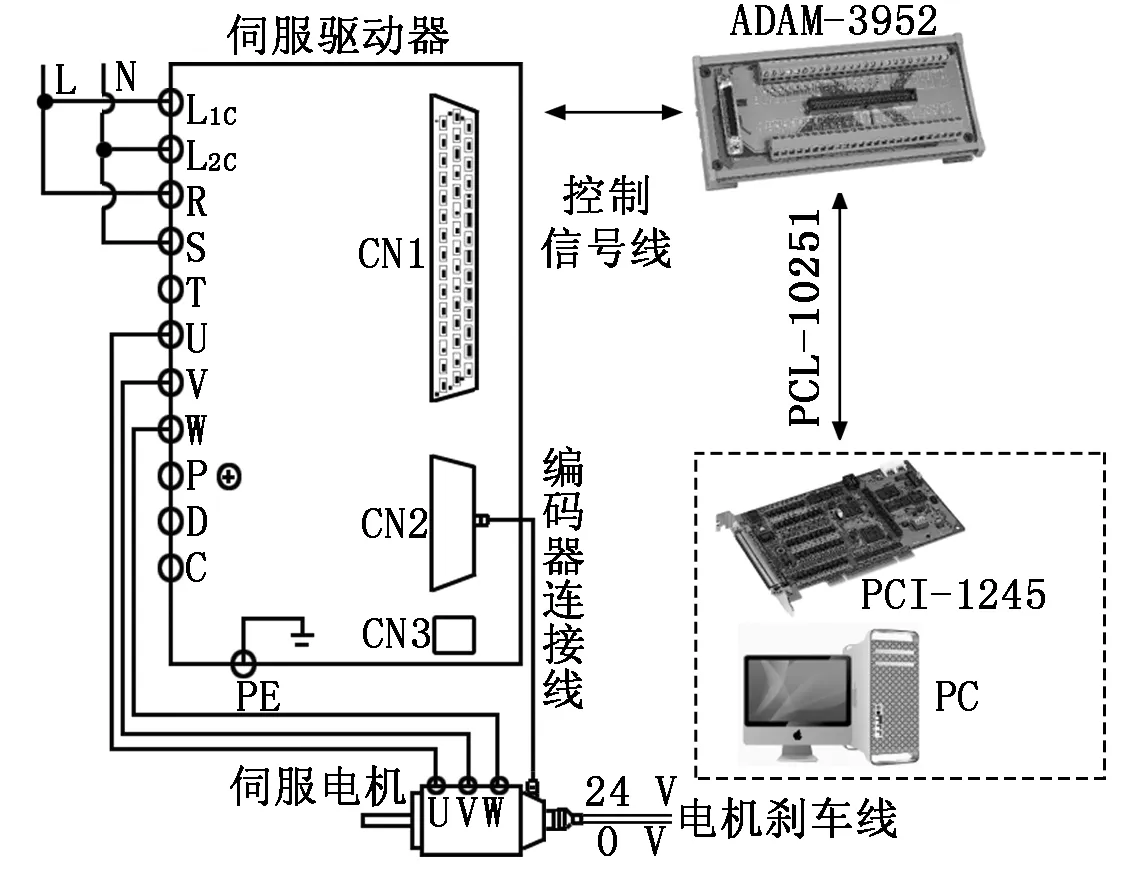
图1 单个伺服电机控制系统硬件接线示意图
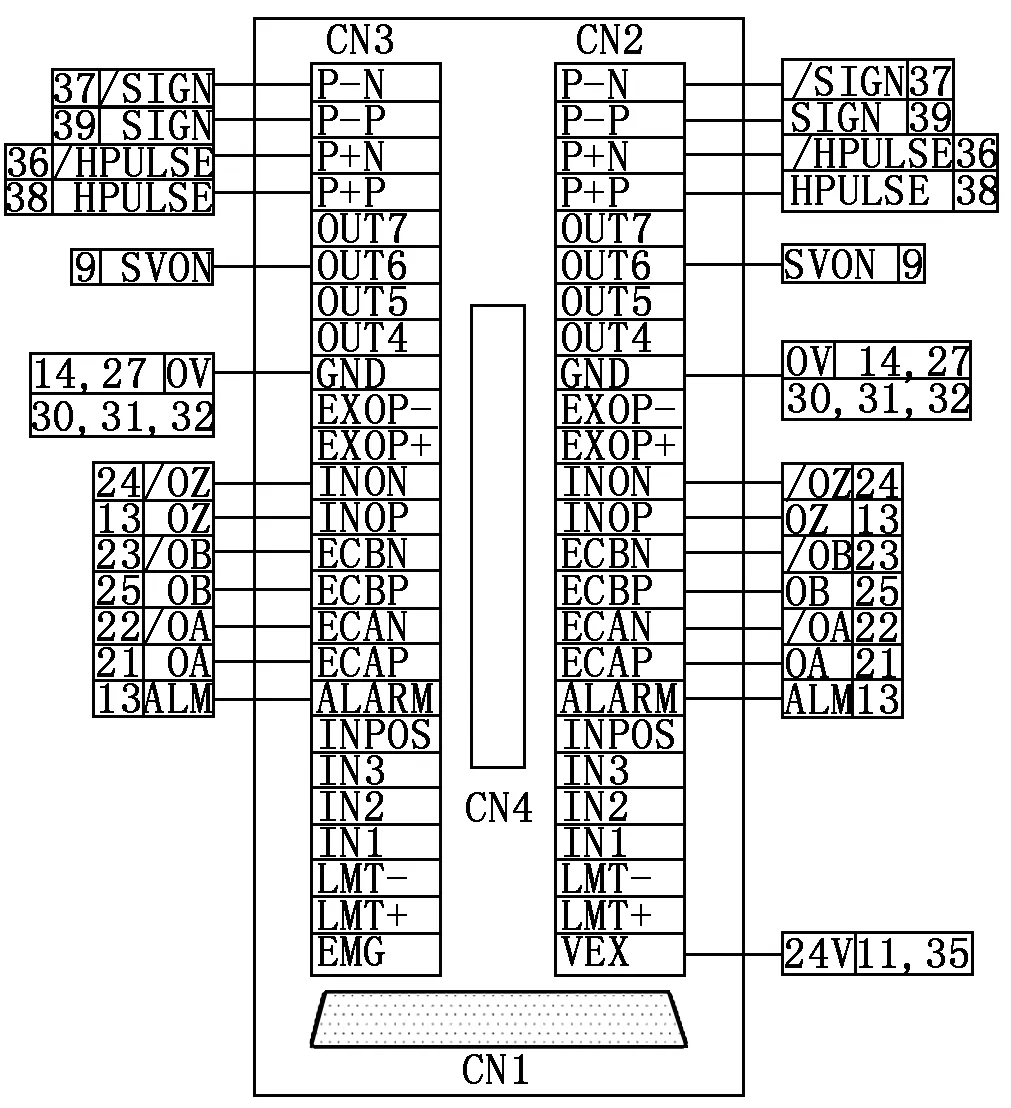
图2 ADAM-3952接线端子板信号配置
2 基于LabVIEW的伺服电机控制程序设计
2.1 伺服电机控制的界面设计
伺服电机程序控制界面如图3所示。点击LabVIEW左上角的运行按钮,Device Type内便显示PCI-1245,表示已读取到板卡信息,之后点击Open Board及Servo On,此时可以检测伺服电机能不能自动转动,DeviceOpened、AxisOpened、Servo_On的指示灯变亮表明伺服电机可以正常运行。控制界面还可以设定伺服电机的运行角度和运行速度,设定好后点击独立运行,伺服电机单独运行的角度和速度便实时显示在界面上。如果要进行四轴联动,4台伺服电机的运行角度和速度都设定好之后,点击四轴联动按钮即可。通过点击控制界面上的电机复位按钮,可以使电机以找圆方式Z相脉冲返回至机械原点[7,8]。控制界面上的Reset Counter可以将伺服电机的轴位置信息Axis Position清除,即清除当前脉冲发送出的脉冲总数,脉冲总数可以计算电机一共转多少圈。在点击伺服电机复位按钮前,如果电机少于4个,则需要选择相应的伺服电机,否则四轴一起复位,如果有1个轴没有电机则会一直在发脉冲找圆,需要陆续点击CloseBoard、OpenBoard以及Servo On。伺服电机轴运行速度的单位为PPU/s,表示伺服电机每秒发送的脉冲数。

图3 伺服电机程序控制界面
2.2 程序控制流程
运动控制卡使用DSP、FPGA作为底层运算的控制器,所以在运行所有的运动控制功能时,底层的DSP架构可以使运动控制卡不受计算机CPU负载所引起的延迟和连续性的影响,可以在满足精确运动中同步应用需求的情况下,完成运动轨迹和时间计算控制[9]。通过研华公司提供的可支持32/64位窗口操作系统的完整窗口动态驱动程序Common Motion API共享驱动平台以及其足够的应用例程,可以较为便利地进行控制系统的配置、诊断及程序开发[10]。伺服电机控制程序编写中需要调用的API应用程序编程接口函数描述见表1,伺服电机程序控制流程见图4。
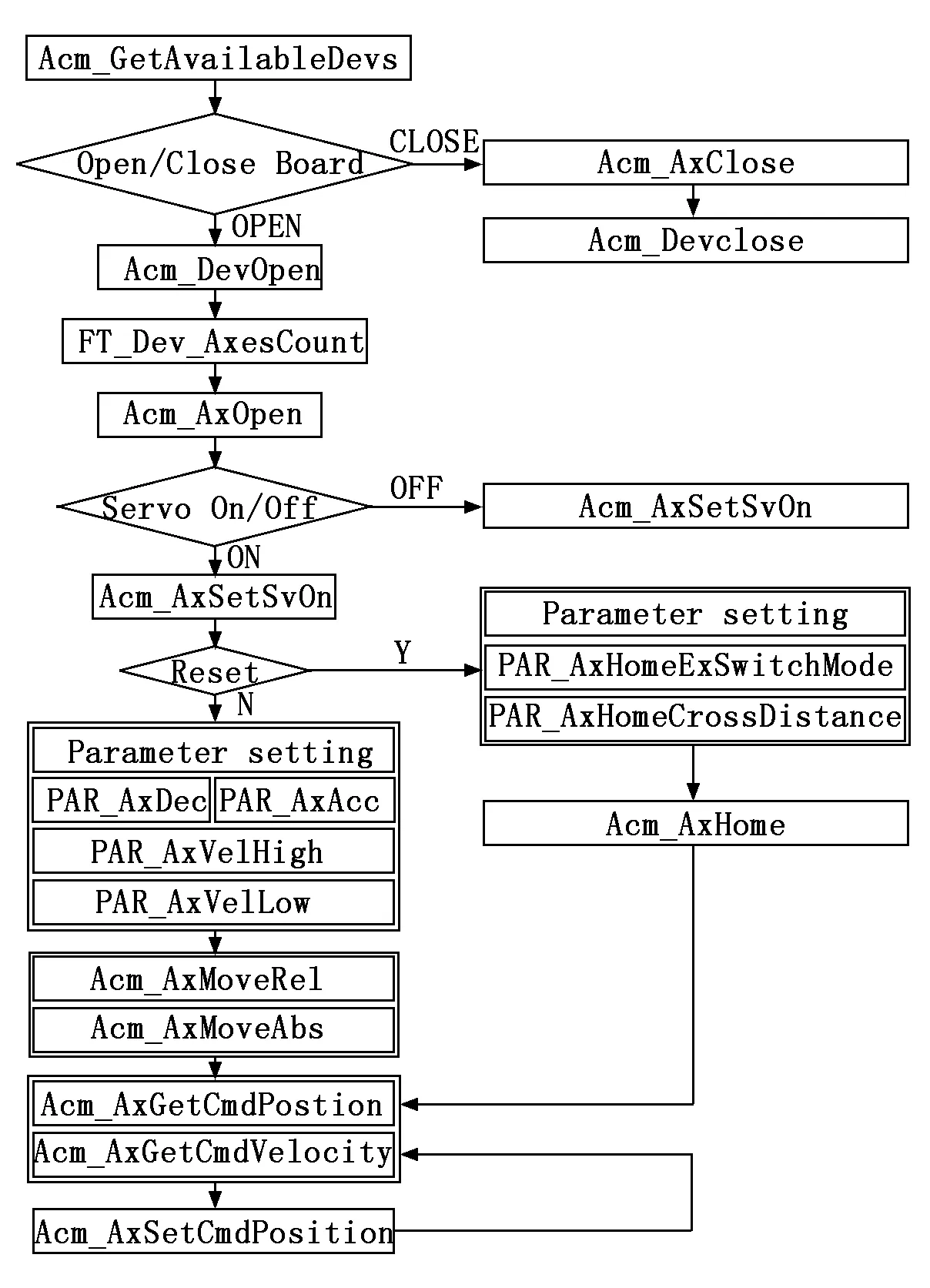
图4 伺服电机程序控制流程

表1 运动控制卡的主要API函数
3 实验验证
根据硬件电路原理图,将所有的硬件通过规定的线缆接好,摆放整齐,并将运动控制卡插入到计算机相应的PCI卡槽内,具体的实物连接如图5所示。驱动器参数配置如下:将P1-00设置为2(脉冲方向控制方式);将P1-01设置为0(位置控制模式),默认为台达B2系列伺服电机;P1-44和P1-45分别为电子齿轮比的分子和分母,默认值为16和10,我们这里设定P1-44的值为1 600,P1-45保持默认值不变,这样每当有1 000个脉冲发送至伺服驱动器时,伺服电机就会转一圈,位置指令的脉冲数等于电子齿轮比与指令脉冲输入之积,而伺服电机正反转只由脉冲的正负来选择。单轴独立运行或四轴联动运行时分别设置好其中一个或4个轴的速度和运行角度后,点击独立运行或四轴联动运行按钮后,可以在主面板的右下角观测到轴的实时运行角度和速度正在根据设置的数值而发生变化,而Axis Position为当前驱动器已接收的脉冲数。点击电机复位按钮后,可以发现电机根据设定的速度缓缓进行复位,回归原点,在主面板可以观察到运行过程中的数据。
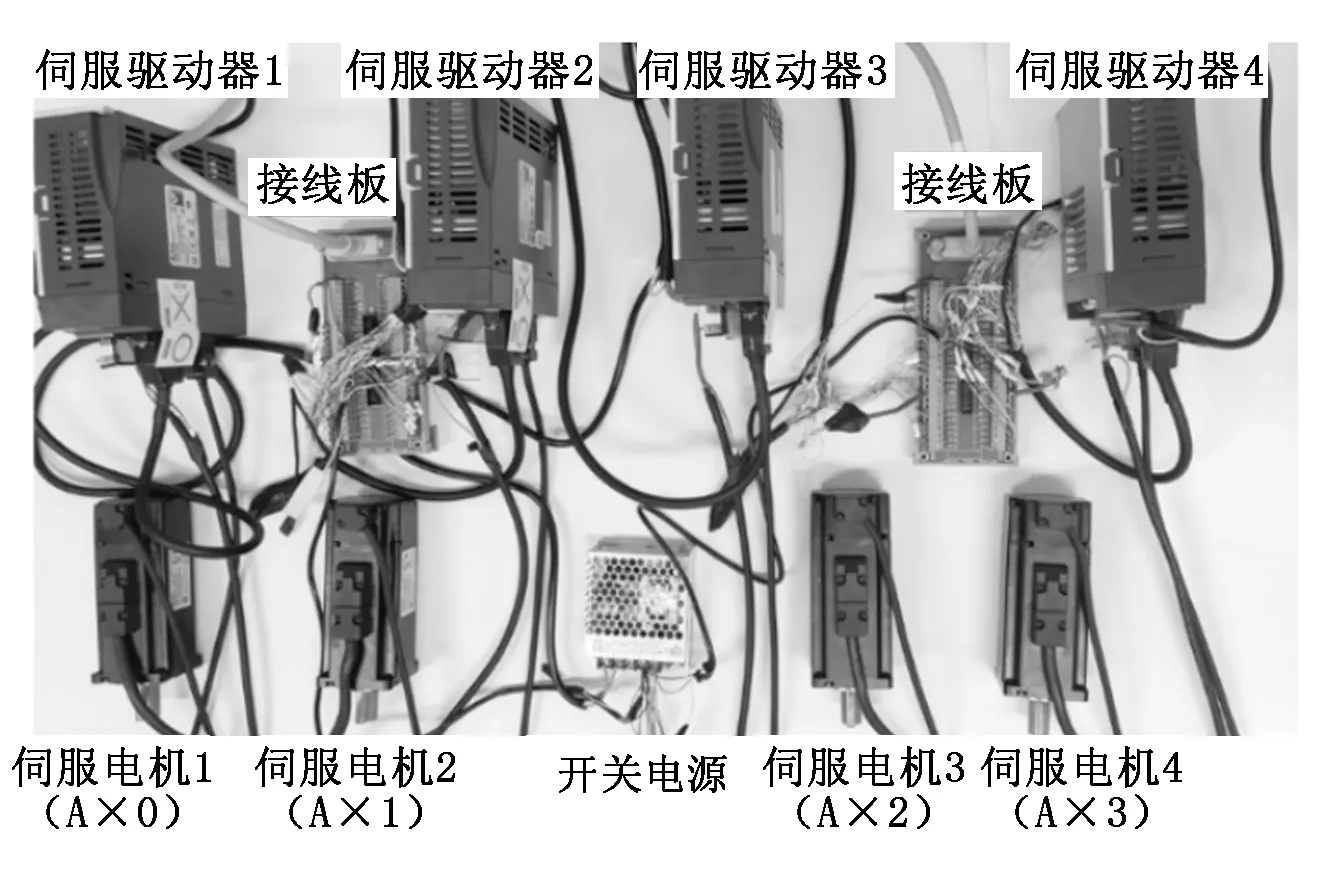
图5 伺服电机硬件连接
4 结论
本文以研华运动控制卡、台达伺服驱动器及伺服电机等为硬件搭建了伺服电机运动控制系统,在LabVIEW图形化语言开发环境下,实现了单轴和多轴伺服电机的独立运行和联动运行、运行参数实时监测和电机复位等功能,为进一步实现伺服电机的运动轨迹和时间计算控制奠定了基础。
猜你喜欢
机电工程技术(2022年8期)2022-09-22
微特电机(2020年11期)2020-12-30
电脑爱好者(2020年6期)2020-05-26
科技创新与应用(2019年32期)2019-12-02
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年5期)2017-11-23
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年5期)2016-11-07
工业设计(2016年6期)2016-04-17
