
全集成自动化系统在海洋工程船中的应用
2021-03-18 03:25阮昊
机电信息 2021年8期

摘 要:以“海洋石油286”工程船项目的全集成自动化系统为实例,介绍了全集成自动化系统在海洋工程船项目上的应用与设计,详细分析了海洋工程船全集成自动化系统的特点,阐述了海洋工程船自动化系统的网络结构、软硬件设计要点,并对海洋工程船自动化系统的发展方向进行了展望。
关键词:海洋工程船;全集成自动化;应用;设计
0 引言
随着国家海洋战略的不断深入,我国对海洋探索和开发的力度也逐年加大。近年来各类型高科技海洋工程船项目不断交付使用,对海洋工程船自动化系统的要求也越来越高,全集成自动化系统需同时具备先进性、稳定性、快速性和兼容性等特征。西门子作为全球自动化系统的引领者,其提供的船舶全集成自动化系统在众多海洋石油工程船项目中得到了广泛应用,如“海洋石油286”“海洋石油760”“海洋石油720”“海洋石油721”等。
本文将基于“海洋石油286”工程船项目自动化系统,重点介绍海洋工程船全集成自动化系统的特点及网络结构、软硬件设计要点。
1 海洋工程船项目全集成自动化系统的特点
现代的海洋工程船科技含量越来越高,功能也越来越多,通常具有油气资源开发、电缆敷设、大型结构吊装等功能。考虑到海洋工程的作业功能,其动力定位DP要求都较高,通常为DP2或DP3,这对船上各系统的冗余性提出了严格的要求。
例如,“海洋石油286”深水工程船是中国首艘作业能力达到3 000 m水深的世界顶级技术难度的海洋工程船舶,专门用于深海油气资源开发,其配有升沉补偿功能的400 t大型海洋工程起重机和最大作业水深达3 000 m的水下机器人,具有深水大型结构物吊装、脐带缆与电缆敷设、饱和潜水作业支持以及深水设施检验、维护等多项功能。
“海洋石油286”是CCS和DNV双船级社,动力定位要求等级是最高的DP3。由于该船综合作业能力强,因此船上设备也比一般船要更多,报警点达到8 000点(硬点约3 500点,通信点约4 500点),对自动化系统的要求非常高,主要体现在以下两个方面:
(1)冗余性:船级社DP3要求在任何情况下的单点故障不应影响到船只的动力定位功能。本项目自动化系统采用的是两套冗余CPU417H和一组独立的CPU416,OS操作站与CPU之间的通信及CPU与采集箱之间的通信都是使用光纤双环网,任何一个单点故障都不会影响到整个系统的正常运行。
(2)控制逻辑复杂性:该船需要自动化系统进行远程遥控的设备(包括配电板断路器、泵、阀门)有200多个,为保证该船能达到技术规格书要求的船级社等级符号,需要做大量复杂的联锁控制逻辑。
2 全集成自动化系统的网络结构
“海洋石油286”工程船项目全集成自动化系统在设计时充分考虑到系统网络的冗余性,以满足船舶动力定位DP3要求,采用的三层网络总线结构均为光纤双环网冗余设计,如图1所示。
2.1 现场总线(Field Bus)
现场采集箱(FS柜)与过程处理柜(PCU柜)之间的现场总线采用Profibus DP协议的双环网光纤通信,通信速率为100 Mbps。
2.2 过程总线(Process Bus)
操作站服务器(OSS)与过程处理柜(PCU柜)之间的过程总线采用的是ISO协议的双环网光纤通信,通信速率最高可达到1 000 Mbps。
2.3 终端总线(Terminal Bus)
操作站服务器(OSS)与操作站客户端(OSC)之间的终端总线采用的是TCP/IP协议的双环网光纤通信,通信速率最高可达到1 000 Mbps。
上述三层网络中出现任何单点故障均不会影响到系统正常运行。
3 全集成自动化系统的硬件设计
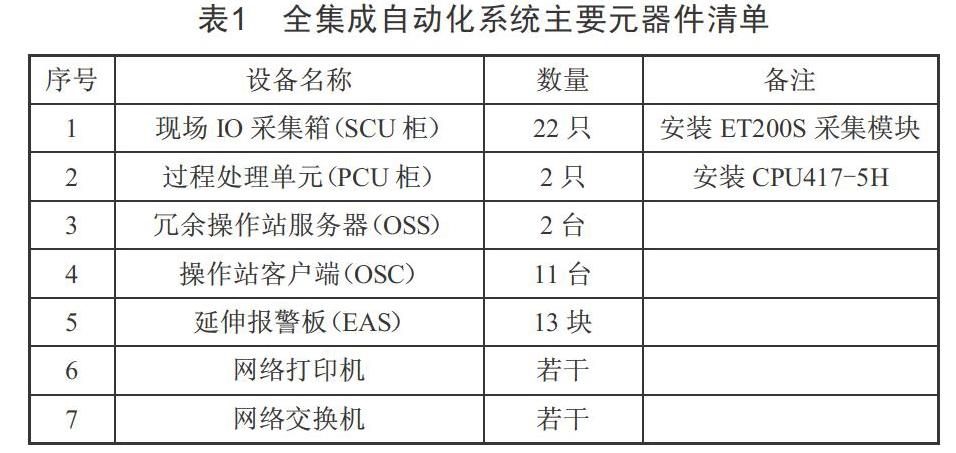
“海洋石油286”工程船项目全集成自动化系统的主要元器件如表1所示。
“海洋石油286”工程船项目自动化系统报警点有约8 000点,因此PLC使用的是两套西门子冗余CPU417-5H,处理数据量最大可达10 000点,而且该PLC具有热冗余性能,当一个CPU出现故障的时候,可自动切换到备用CPU,从而保证系统的正常运行。它的Profibus DP接口最多可连接125个ET200 IO分站。
根据该船DP3要求,互为冗余的两个CPU需放置在两个单独的防火分隔里,避免一个CPU所处的舱室进水或发生火灾时,另一个CPU受影响。在“海洋石油286”项目中冗余配置两个CPU417-5H,一个安装在前机舱配电板间的PCU1柜,另一个安装在后机舱配电板间的PCU2柜内。
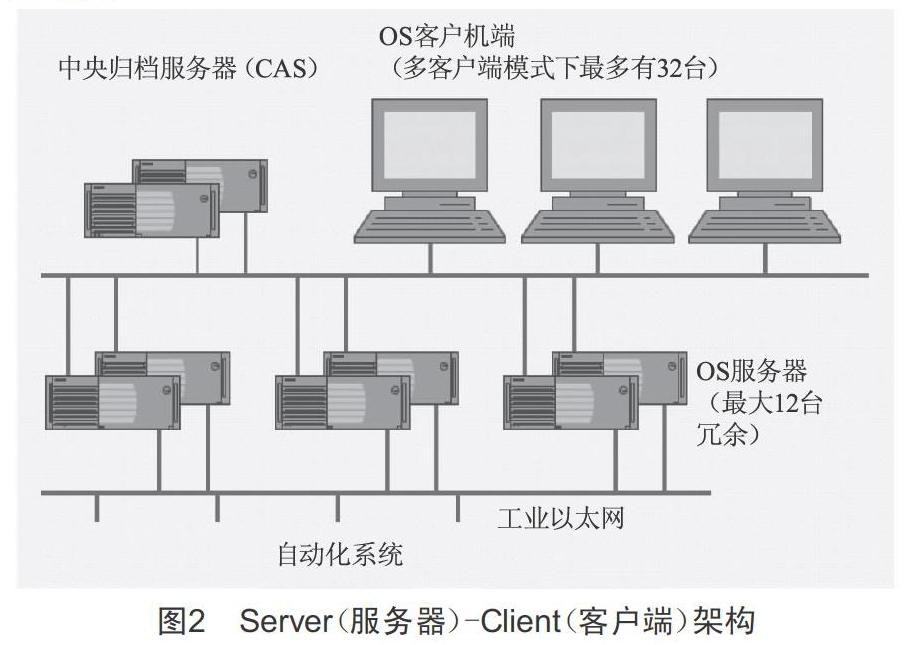
上位机采用Server(服务器)-Client(客户端)架构,如图2所示。
“海洋石油286”项目采用两台OS服务器,服务器选用的是西门子高性能工控机SIMATIC IPC647C,服务器负责从PLC中读取数据并发送给11台OS客户端,所有客户端从服务器而不是从PLC获取数据,这样可以缓解PLC侧的通信量。两台服务器互为热冗余备用,当一台OS服务器故障时,立即切换到备用服务器,使系统能不间断地继续工作,满足该船动力定位DP3的要求。
4 全集成自动化系统的软件设计
“海洋石油286”项目全集成自动化系统软件使用的是西门子SIMATIC PCS7软件,它是国际领先的过程控制系统,无缝集成了STEP7编程软件及WinCC画面處理软件,广泛应用于西门子各行业的自动化控制系统中。
STEP7软件用于S7-400 CPU的组态及功能块、数据块的设计与程序的编写。
自动化系统软件设计充分考虑到了海洋石油工程船的性能特点,除了一些自动化系统的标准功能,如报警显示、阀门及泵的控制等,还增加了一些特殊的逻辑功能。
4.1 备用泵自动启动
因海洋工程船项目大多动力定位DP等级较高,海水泵、淡水泵、燃油输送泵、滑油输送泵等都是一主一备,在自动模式下,当主泵出现故障和报警时,系统会立刻自动切换到备用泵,船员也可在电脑画面上手动切换,保证了船舶系统的安全运行。
4.2 推进系统的辅助系统一键启动
当船员需要启动推进器时,需要先启动推进系统的辅助系统,如液压泵、滑油泵等。为了方便船员操作,在自动化系统中,做了“辅助系统一键启动”功能,只需要在画面上点击一次该按钮,相应的推进辅助泵就会启动运行,并在辅助系统启动完毕后给予操作员一个绿色图标指示,则船员可直接启动推进器。
4.3 全船失电后的自动恢复(Blackout Recovery)
当船上遇到紧急情况造成全船失电时,自动化系统将记录下部分主要设备(如开关、泵、风机等)的工作状态,在主配电板得电后,将自动发出命令,将失电之前运行的泵、风机及合闸的开关恢复至失电前的状态。
5 全集成自动化系统的人机界面设计
“海洋石油286”项目自动化人机界面采用的是SIMATIC WinCC设计,整个系统的画面设计既考虑到了美观,也考虑到了操作的安全和便捷性,总共约有110幅Mimic图,图片遵循了西门子自动化系统画面设计的基本原则:
(1)不同的区域通过模拟图的方式显示,并提供整个系统的总览。
(2)通过模拟图操作员可以对设备执行操作。模拟图向操作员提供重要的设备信息(执行器、阀门、测量值、信号显示等)。
(3)操作:1)操作主要通过鼠标实现,键盘用来输入数据;2)键盘上F1~F10均设置为快捷热键,方便操作员的使用;3)操作设备前,首先在模拟图上选择设备,通过鼠标点击设备图标,打开相应的窗口(faceplate);4)出于安全考虑,过程相关的操作,操作员必须要有相应的权限;5)切换驱动器或者输入设定值的操作会在消息系统记录下来。
(4)系统提供大量的诊断功能支持维护人员。
(5)系统的颜色标准化并附带一些特定的信息,例如电机运行是绿色的,停止是白色,报警显示红色、警告显示黄色等。
(6)图形显示和对象标准化。
针对“海洋石油286”工程船的特点,自动化系统专门增加了DP操作界面,如图3所示。将与动力定位相关的设备,如开关、推进器、发电机等设备的状态、主要参数及控制集中到几幅画面,极大地方便了船员在动力定位时的操作和观察。
6 全集成自动化系统的远程诊断功能
海洋工程船长时间在海上作业,一旦出现设备故障,船员无法解决,设备服务工程师上船又耽误时间,这时候远程诊断系统就能发挥作用。在“海洋石油286”工程船上就安装了西门子自动化远程诊断(RDS)系统,系统架构如图4所示。
船上各电气系统(如配电、自动化、推进等系统)可将信息通过以太网发送给全集成自动化系统的工程师站。当设备出现故障时,岸上工程师可使用RDS服务器通过网络远程连上船上的工程师站,实时在线分析各项数据及曲线,帮助船员查找故障原因,指导其排除故障。出于安全考虑,船上装有防火墙,可有效防止无关人员的网络入侵。
从实际使用效果来看,远程诊断系统的应用极大地减少了设备服务商上船的次数,缩短了故障排除时间。
7 海洋工程船自动化系统展望
随着海洋科技的发展,人们对海洋工程船自动化系统的要求也越来越高,未来海洋工程船自动化系统的发展方向主要有以下几个方面:
7.1 远程管理化
因为海洋工程船常年漂浮在海上作业,远程数据传送和诊断功能在船舶上显得非常重要。
(1)数据传送:船舶管理方需要在岸上办公室实时了解各船舶主要设备的运行状况,得到远程实时传送的数据,便于船舶管理人员做出合理的调度和安排。
(2)远程诊断:如果船舶设备遇到故障,安排人员上船服务费时费力,而远程诊断系统可以让专家、服务商在线远程帮助分析、解决问题。
7.2 数字智能化
随着大数据及人工智能的发展,数字化系统将会越来越多地运用到海洋工程船的自动化系统中。
(1)通过大数据判断,提前发现可能出现的故障;
(2)通过人工智能及专家系统,给出故障解决方案;
(3)通过大数据分析,及时更换备件,防患于未然。
全集成自动化系统在海洋工程船上的应用和发展,将使海洋工程船的使用和操作更加高效、便捷、智能。
[参考文献]
[1] 梁国彬.基于PLC控制的船舶机舱监测系统及其软件实现[J].自动化博览,2008,25(7):84-86.
[2] 孙凤玲,高凤平.船舶集中控制与监测报警系统[J].机电设备,2000(5):18-20.
[3] 战兴群,赵隽,张炎华,等.机舱监测报警系统研制[J].船舶工程,2001(3):42-46.
[4] 侯馨光.我国应加快推進船舶与海洋工程自动化研发[J].船舶经济贸易,2012(2):28-30.
[5] 张旭,李迪阳,孙建波,等.船舶机舱监测报警系统[J].计算机工程与应用,2005,41(22):229-232.
[6] 王琪.船舶机舱监测报警系统的应用现状及发展趋势[J].机电设备,2007,24(6):32-35.
[7] 张春.西门子STEP 7编程语言与使用技巧[M].北京:机械工业出版社,2009.
[8] 胡健.西门子S7-300 PLC应用教程[M].北京:机械工业出版社,2007.
[9] Siemens AG.Programming with S7-SCL[Z].
[10] Siemens AG.WinCC组态手册(共3册)[Z].
收稿日期:2021-01-11
作者简介:阮昊(1979—),男,江西新余人,工程师,研究方向:船舶电气自动化。
猜你喜欢
中国品牌(2020年11期)2020-12-23
Coco薇(2017年5期)2017-06-05
艺术评论(2016年10期)2016-11-28
考试周刊(2016年76期)2016-10-09
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
Coco薇(2015年12期)2015-12-10
