
基于L2正则化LSTM的非线性动态系统辨识
2021-03-19 06:13徐宝昌董秀娟
化工自动化及仪表 2021年1期
徐宝昌 吕 爽 董秀娟 王 健
(1.中国石油大学(北京)信息科学与工程学院;2.中石油北京天然气管道有限公司)
实现良好的控制是提高工业生产过程经济效益、保障生产安全的关键,而实现良好控制的基础就是建立准确的模型。 但现有的化工过程辨识方法大多过于依赖实验获得的数据,这严重地限制了其使用范围。 随着计算机计算能力的提升,DCS在实际生产中逐渐普及,大量的生产数据被存储在本地或云端,这些数据中蕴含着生产过程的各种动静态信息, 如果能充分挖掘DCS中数据的信息,通过一定的模型结构和参数来表达非线性的动态过程,建立良好的替代模型,将能够更好地掌握过程的内在特性,便于研究出更加高效稳定的控制方法, 实现对整个流程的故障预测、控制、监督以及经济效益优化等。
为解决上述问题, 笔者引入深度学习算法中的模型——长短期记忆(Long Short-Term Memory,LSTM)[1]。 LSTM 在 循 环 神 经 网 络(Recurrent Neural Network,RNN) 的基础上引入长短期记忆结构,既考虑了过往信息的影响,也有效地解决了梯度消失或爆炸问题,在手写识别[2]、图像分析[3]及时间序列预测等方面表现出良好的效果。 Yadav A等利用LSTM对印度股票市场进行预测,通过有无状态模型和隐藏层数量对网络进行优化,结果表明LSTM在股票预测上具有可行性[4];Gonzalez J和Yu W则利用LSTM与神经网络的结合,证明了改进后的方法对于只使用测试输入、不利用以往测试输出的模型而言具有更好的效果[5];Joohyun W等利用LSTM进行无人水面车辆(SUV)模型的建立,该方法相比传统的线性动态模型降低了浪涌预测误差、偏航率预测误差等,表现出良好的性能[6]。 针对基本结构对数据契合不高的问题,学者们对其结构进行了改变或采用与其他模型、方法相结合的思路,如韩恒贵利用LSTM的变体GRU和混合模型进行绝缘双极性晶体管的故障预测,实验结果表明新方法进行故障预测的均方根值为0.075 6,预测效果有了很大的提升[7];Yu R等提出一种基于序列相关特征的LSTM-EFG模型用于风力发电预测,该方法对遗忘门功能进行了增强,提高了预测的效果[8]。
在实际应用中,LSTM基础网络由于结构和输入数据不足等问题, 往往会出现模型过拟合、泛化能力低等问题,为此笔者结合常用于解决过拟合现象的正则化[9,10]方法提出基于L2正则化LSTM辨识策略, 并利用非自衡系统TE过程(Tennessee Eastman Process)进行方法有效性的验证。 通过实验表明,该方法具有更快的收敛速度,模型泛化能力更强,对所需辨识数据要求更低,辨识得到的模型可以很好地反映系统的阶跃响应过程,预测系统的输出。
1 L2正则化LSTM模型
1.1 LSTM模型
LSTM 是由RNN 发展而来的重要结构,由Hochreiter S和Schmidhuber J于1997年提出[1],它在RNN的基础上增加了输入门、输出门、遗忘门和记忆单元4个门限, 能够对长距离依赖问题进行处理,避免梯度消失或爆炸的问题。 LSTM内部结构如图1所示。
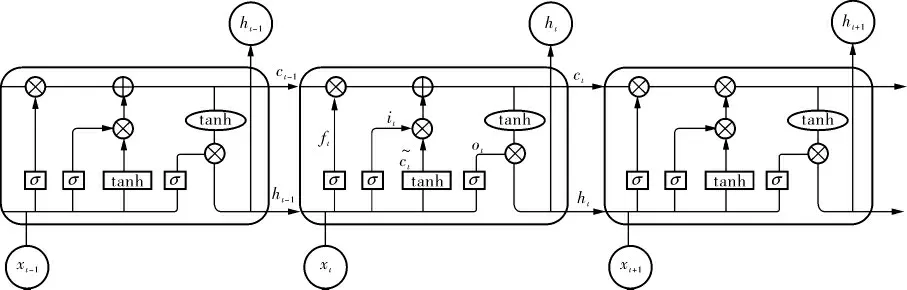
图1 LSTM内部结构
在LSTM的结构中,以t时刻的输入xt和前一时刻的状态信息ht-1作为输入信息,通过内部细胞进行状态单元的填充或移除完成信息更新。 原始的LSTM结构的门限由sigmoid函数与矩阵点乘组成,由于sigmoid函数的输出为0~1之间的数字,因此可以描述信息的通过程度, 其中0代表移除,1代表全部信息通过。 LSTM网络的前向传播可以表示为:

1.2 基于L2正则化LSTM模型
为增强辨识模型的泛化能力,笔者采用可以对参数进行稀疏化的L2正则化方法对LSTM基础模型进行优化,即在原损失函数上加上L2范数正则化项,得到的损失函数J公式如下:

其中,λ为正则化系数,用于权衡正则项与原始函数的比重;n为训练集样本大小;J0为原始的损失函数;ω为权重;yi为模型实际输出;为模型预测输出。
根据上述公式,权重ω的更新为:

其中,η为学习率。
根据式 (7)、(8), 可以得到基于L2正则化LSTM辨识策略的权值更新公式:
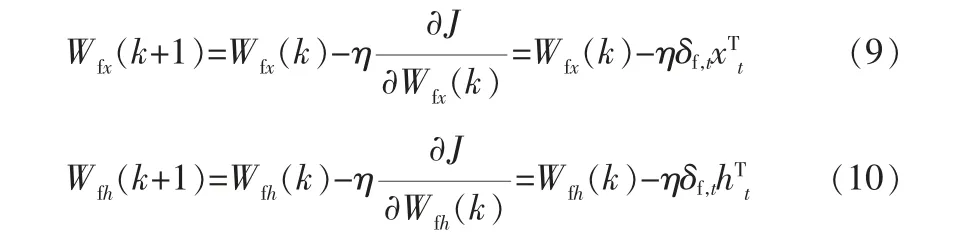
其中,Wfx、Wfh分别为遗忘门更新时输入信息和上一层状态所对应的更新权重;k为时刻;δf,t为损失函数J对于Wf·[ht-1,xt]+bf的偏导数。
其余权值更新公式同理。
2 实验及结果分析
2.1 数据来源及预处理
笔者采用非自衡系统TE过程作为辨识对象。TE过程是一个实际化工过程的仿真模拟,它是由美国Tennessee Eastman化学公司过程控制小组的Downs J J和Vogel E F提出的[11],被广泛地应用于过程控制技术的研究[12]。整个TE过程可以被用来进行各种各样的过程研究,主要包括装置的控制策略设计、多变量控制、过程优化及预测控制等。
TE过程包含12个操纵变量和41个测量变量,所给出的已知数据集中包含21个预先设定好的故障,其中16个为已知故障(包含阶跃、随机变量等),5个为未知故障。 每一种故障对应两组数据,分别为具有498个数据的训练集和948个数据的测试集。 文中笔者选取12个操纵变量作为输入,产品分离器温度XMEAS11的测量值作为输出,具体的训练集、测试集、验证集来源见表1。

表1 实验中涉及的几组数据集组合
TE过程所提供的数据集来自仿真实验,需要进行时序处理才能符合L2正则化LSTM网络的输入形式。 同时,为消除不同量纲和数量级带来的影响,需将数据集进行0~1标准化处理。 笔者选用以下几种模型评价指标来对辨识效果进行评估,包括ACC (精确度)、MAPE (平均相对百分比误差)、RMSE(均方根误差)及R2(拟合优度)等。 其中,MAPE和RMSE的值越小, 说明模型建立的效果越好;R2衡量的是回归方程整体的拟合度,R2的值越接近1,说明模型的拟合效果越好。 具体评价指标如下:

其中,y-为实际输出的平均值。
2.2 LSTM网络结构设定
文中用前n步时间状态的11个操纵变量数据预测后m步产品分离器温度XMEAS11,即网络输入X={X1(t),X2(t),…,X11(t),…,X1(t-n),X2(tn),…,X11(t-n)},输出Y={Y(t),…,Y(t+m)}。
利用L2正则化LSTM辨识策略和表1中的第4组数据集进行TE过程辨识,根据网格搜索法确定标准LSTM辨识时的最优参数组合为:隐藏层参数为25,学习率η为0.3,时间步长time_step为2,迭代次数为1 000次。 从[0,10]中选取正则化系数λ的值,观察训练集、测试集和验证集的评价指标变化,其中验证集变化曲线如图2所示。

图2 验证集偏差随正则化系数λ的变化曲线
根据仿真结果可以得到:验证集偏差随正则化系数λ的增加先减小后增大,当正则化系数λ=2时,验证集偏差最小,正则化方法使用前后的评价指标见表2。

表2 正则化方法使用前后评价指标的对比
2.3 实验对比分析
现利用支持向量回归(SVR)、BP和基于L2正则化LSTM的网络(L2-G-LSTM)对TE过程进行辨识与比较,得到的训练结果如图3、4所示,评价指见标表3~6。 所采用的数据集为表1中的4组数据集。

图3 测试集各个样本预测误差百分比


图4 基于第2组数据集各算法的预测结果

表3 基于第1组数据集的评价指标

(续表3)
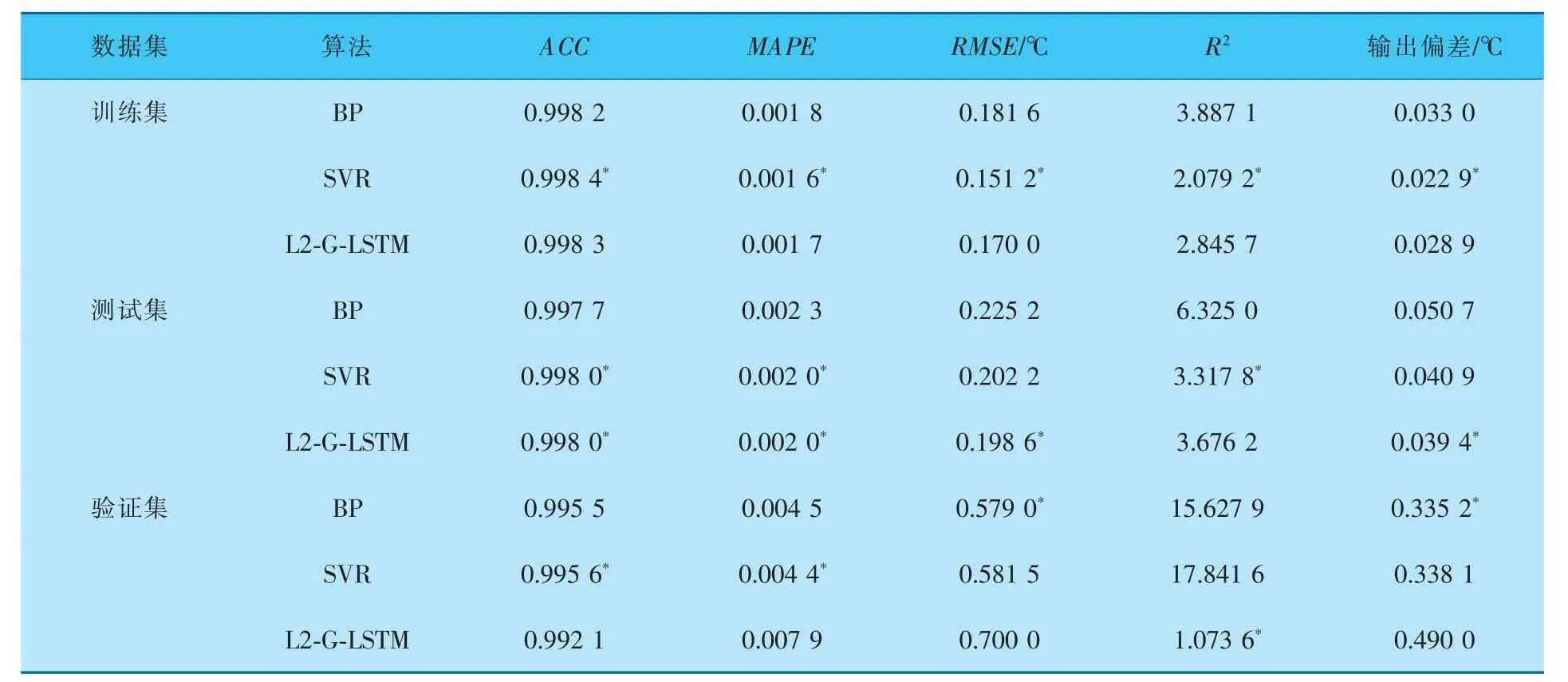
表4 基于第2组数据集的评价指标

表5 基于第3组数据集的评价指标
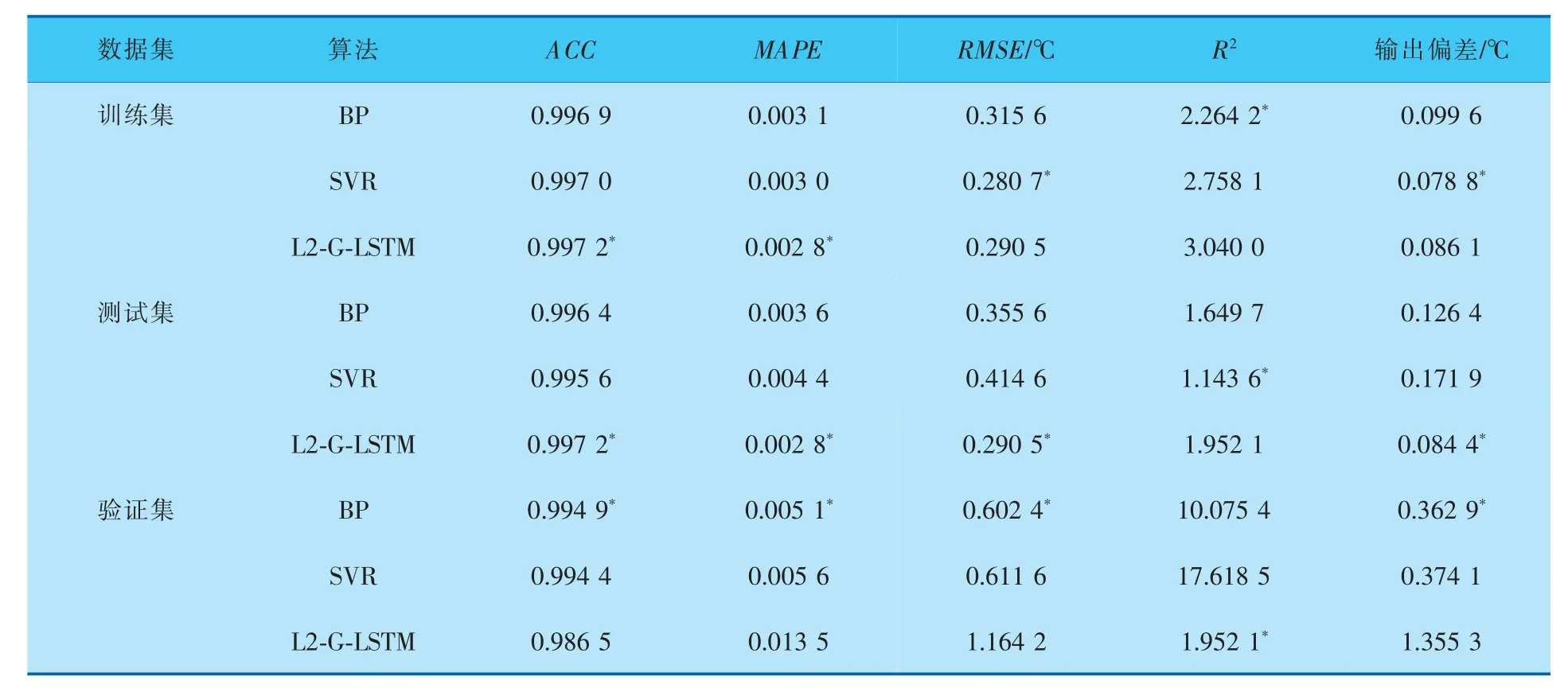
表6 基于第4组数据集的评价指标
从表3~6的结果可以看出, 相较于BP和SVR而言,L2-G-LSTM对TE过程进行辨识时,在训练集和测试集上得到的RMSE、MAPE相对较小,R2和ACC更接近于1,得到的拟合模型更加接近真实模型。 同时根据预测结果和实际输出的对比,L2-GLSTM在验证集上进行验证时,能够更好地反映出系统阶跃响应的各项指标,综合评价指标和预测结果对比结果, 可以充分说明L2-G-LSTM具有更高的泛化能力和更高的辨识精度,能够更好地对非线性动态系统进行建模。 实验中的4组数据集分别对应4种情况,无论在哪种情况下L2-G-LSTM网络基本都能得到综合评价下的最优结果,基于这一点说明基于L2正则化的LSTM对于输入数据的要求较低,为化工实际生产过程的建模提供了更多可能。
3 结束语
笔者提出的基于L2正则化的LSTM辨识策略,能够有效地避免过拟合现象的发生,完成对非线性动态系统的辨识。 与BP、SVR方法相比,具有更快的收敛速度和辨识精度,在测试集上的误差控制在0.15%左右; 在训练集和测试集上的输出偏差控制在0.5℃以下; 拟合优度R2控制在3以内,表明对实际数据的动态走势预测良好。 从对不同数据集的辨识结果来看, 基于L2正则化的LSTM辨识策略能够降低对辨识数据的要求,对含有少量噪声的正常工况数据 (表1中的第1组数据)辨识时,仍然得到了良好的辨识效果,为离线辨识,得到“孪生”模型提供了可能。 将来应考虑利用其他优化算法对LSTM进行优化,以进一步提高辨识精度。
猜你喜欢
贵州师范大学学报(自然科学版)(2022年5期)2022-11-18
黄河之声(2022年10期)2022-09-27
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化·高二版(2022年4期)2022-05-09
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
幽默大师(2020年11期)2020-11-26
摄影之友(影像视觉)(2019年3期)2019-03-30
摄影之友(影像视觉)(2019年2期)2019-03-05
