汽车紧急制动安全与舒适性控制仿真研究
2021-03-29 09:39易来华
汽车实用技术 2021年5期
易来华
(湖南机电职业技术学院,湖南 长沙 410151)
1 AEB系统工作过程分析
1.1 AEB系统整体方案概述
AEB系统是利用光学摄像头或者毫米波雷达来实现路况监测的,尤其是对车前方车辆的检测,当检测系统发现车辆自身与其前方某辆车有碰撞危险时,预警系统就会提醒驾驶员进行制动,若是驾驶员没有进行制动或者制动压力不够,AEB系统就会根据需要或者设定帮助驾驶员提升制动压力,从而避免交通事故的发生[1][2]。由此可以发现,AEB系统的发展是无人驾驶技术进步的基础,而因此AEB系统必须具有信息收集、数据分析以及决策等智能化分析能力,所以,在进行AEB系统设计时,至少需要包含三个部分,即环境感知系统、数据分析系统、决策及执行系统,大体设计框架如图1所示。

图1 汽车AEB系统设计框架示意图
1.2 自动紧急制动过程分析
AEB系统的工作工程可以用图2来进行分析。如图所示,Fb是汽车主缸制动压力,ab是汽车制动减速时候的加速度,当t=0时,AEB系统发现本车与前车有相撞的危险,于是做出预警,提醒驾驶员进行紧急制动,驾驶员经过t1’反应时间,在t=a时刻开始进行制动动作,在t=b时刻刹车板受到驾驶员脚的驱动开始下落,在t=c时刻汽车受到制动压力的影响开始减速,其中t1’表示驾驶员开始抬脚到脚落在刹车板上面的时间,t2’为刹车板开始下落到制动压力刚出现的时间,t2’’为制动压力开始出现到制动压力增加至最大值的时间[3];在t=e时刻汽车的制动压力达到最大值,之后汽车一直处于制动减速状态,直到 t=f时刻时彻底停下来,之后驾驶员或者AEB系统松开制动系统,制动压力经过t4的时间彻底消除,至此AEB系统的整个制动紧急制动过程完全完成。虽然不同的驾驶人员具有不同的反应速度,但是驾驶人员的整体反应速度之间差异性并不是非常巨大,即t1的时间很难进行控制或者缩短,因此,AEB系统的工作重点就在于对后续制动压力出现时间及增长时间总时间t2以及汽车持续制动时间t3进行控制。
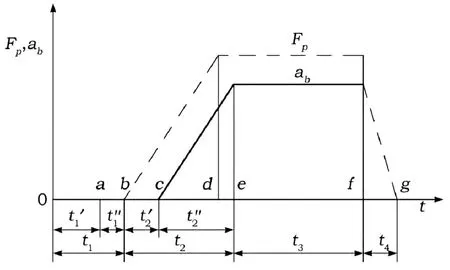
图2 AEB系统制动工作过程分析
1.3 检测目标的选择
一般而言,AEB系统都会选择毫米波雷达来收集车辆周边的环境信息,因为毫米波雷达具有识别目标多、检测距离远以及分辨率高等特点,但是同时毫米波雷达因为其优点会导致其接受的信息中有较多的无效信息,因此,AEB系统要从众多数据中识别出有效目标,确保AEB系统的精确性,避免AEB系统出现误判的现象。当使用毫米波雷达进行环境感知时,如果反馈值为默认值,这表明当前范围内没有目标;当毫米波雷达监测到的目标信息没有连续出现10次,或者其满足公式(1)和(2)时,这表明该目标是无效目标,可以去除;当毫米波雷达检测到的信息为静止目标时,即满足公式(3)时,该目标也可以剔除,当然若是雷达检测到的目标不是行人或者车辆时,也可以将该目标剔除。

注:式中vh是自车车速,n为毫米波雷达采样数据序号且为正整数,v为两车相对速度。
2 制动紧急制动仿真模拟研究
2.1 仿真模型建立
本研究使用Trucksim软件进行车辆动力学分析,并且联合Simulink进行联合仿真,对所设算法进行验证。在Trucksim-Simulink联合仿真模拟中,自车车速由 Trucksim提供,自车与前车之间的距离及速度由雷达检测模块进行信息采集,然后通过 Trucksim-Simulink联合中的数据计算模块计算最小安全距,并且将其与实际距离进行比较,然后根据比较结果,结合预警判断方式,对车辆做出相对的预警决策。Trucksim输入自车行驶车速等相关参数,经过Simulink计算后输出为制动压力,从而实现汽车紧急制动模拟仿真。
2.2 前车静止时仿真结果
假设前车静止,自车行驶速度为 50km·h-1,当两者之间的初始间距为50m时,得到仿真结果如图3a所示,此时当两者之间的间距小于40m时,汽车会启动紧急制动系统,并且在7.5s内完成制动,最终自车与前车之间的距离为20m;当两者之间的初始距离为20m时,仿真结果如图3b所示,当仿真开始时自车的紧急制动系统就已经启动,并且在3.3s内就完成制动动作,两车之间的间距为6m。

图3 前车静止时仿真结果
2.3 前车加速时仿真结果
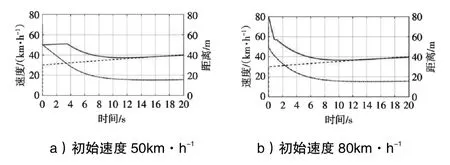
图4 前车静止时仿真结果
假设前车的行驶速度为 30km·h-1,自车与前车之间的初始间距为50m,当自车的初始车速为50km·h-1时,仿真结果如图4a所示,在前3.8s的时间内,自车处于安全行驶状态,此时车辆无制动信息产生,当到3.8s时,即两车之间的间距接近30m时,自车开始启动紧急制动系统,然后通过约7.2s的制动过程,自车与前车之间保持约16米的间距,并且自车车速与前车车速相近,维持平稳状态继续行驶;当自车的初始车速为 80km·h-1时,仿真结果如图4b所示,仿真结果开始时自车就进入紧急制动状态,在经过约11s的制动之后,两车之间保持相近的行驶速度,且维持约17米的汽车间距,继续行驶。
2.4 仿真结果分析
经过对三种状态的仿真结果进行分析可以发现,AEB系统可以有效帮助自车发现危险情况并且通过紧急制动避免自车与前车发生碰撞而导致交通事故的产生,表明使用最小安全距离进行AEB系统的判断依据是可靠的,同时还可以发现,制动系统启动后的最终结果和自车与前车两者的运动状态都有关系,最终的运行状态分别为自车停止或者自车与前车保持相同的行驶速度以及不变的两车间距,从而也证明仿真模拟开始前的情景假设是合理的。
3 结束语
汽车紧急制动时的安全性与舒适性是两个重要评估指标,两者往往难以同时兼顾。本文利用联合仿真方式,对汽车AEB系统进行仿真模拟研究。在本研究的模糊控制中,控制输入为距离和相对速度,控制输出为汽车制动压力。最终的仿真模拟结果表明,基于上述模糊控制条件,汽车紧急制动系统能在保证安全性的前提下兼顾驾驶舒适性,完美平衡了紧急制动系统安全性与舒适性两个指标,具有深入研究的意义与价值。
猜你喜欢
时代汽车(2022年17期)2022-09-06
读者(2022年13期)2022-06-20
电脑爱好者(2021年17期)2021-11-11
电脑爱好者(2021年24期)2021-09-09
汽车杂志(2018年6期)2018-06-25
作文周刊·小学一年级版(2017年27期)2017-08-10
计算机辅助工程(2016年3期)2016-08-01
小学生导刊(低年级)(2016年5期)2016-05-27
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14