
基于GPS与超宽带的室内外无缝定位改进算法
2021-03-30 05:42汪宇航李莉郑正奇赵昆
上海师范大学学报·自然科学版 2021年1期
关键词:超宽带
汪宇航 李莉 郑正奇 赵昆

摘 要: 结合GPS、惯性导航技术以及超宽带(UWB)技术,提出基于定位信号数量和信号强度的定位方法切换策略.根据切换策略,将伪距测量、Chan-Taylor协同算法以及行人航迹推算算法进行松散组合,得到优化后的定位算法. 通过实验验证了切换策略的可行性,优化了室内外交界区域的定位轨迹,为室内外无缝定位技术提供了思路.
关键词: 超宽带(UWB); Chan-Taylor协同算法; 手机GPS; 室内外无缝定位
中图分类号: TN 92 文献标志码: A 文章编号: 1000-5137(2021)01-0084-08
Abstract: A switching strategy of positioning method combining GPS, inertial navigation with ultra-wide band (UWB) based on signal quantity and signal strength was proposed in this paper. An optimized positioning algorithm was provided based on loose combination of technology of psecudo-range measurement,Chan-Taylor collaborative algorithm and pedestrian dead reckoning according to the strategy above. The experiment result showed that the switching strategy was feasible and the positioning trajectory of the connection area was optimized, which provided a novel idea for indoor and outdoor seamless positioning technology.
Key words: ultra-wide band (UWB); Chan-Taylor collaborative algorithm; GPS based on smart phone; indoor and outdoor seamless positioning
0 引言
当前全球四大卫星导航系统包括美国的GPS、欧盟的伽利略、俄罗斯的格洛纳斯以及中国的北斗,它们在室外定位方面具有高精度、全覆盖等优点[1].然而,在复杂的室内环境下,由于信号遮挡和多径效应等因素会导致卫星的定位信号衰弱,使其定位效果变差,甚至不能正常工作.
为了解决室外定位技术无法实现精确室内定位的问题,室内定位技术逐渐发展起来.当前主流的室内定位技术包括超宽带(UWB)技术、WIFI技术、射频识别(RFID)技术、超声波技术、ZigBee技术、蓝牙技术和红外线技术等[2-3].但是室内定位与室外定位相对独立,在室内外交界区域的复杂环境下,单一的定位技术很难同时覆盖室内外空间,无法满足整体精度要求,于是室内外无缝定位技术应运而生.
无缝定位技术保证多种场景下定位技术、算法、精度和覆盖范围的平滑过渡和无缝连接[4],同时兼容室外和室内定位技术,目前处于研究初级阶段,更实用的无缝定位算法仍是未来研究的热点.
关维国等[5]提出了“北斗”与WIFI的融合定位方法,解决了单一的“北斗”或WIFI定位系统盲区问题,提高了定位精度.邬春明等[6]提出了差分GPS(DGPS)和UWB的无缝定位技术,解决了DGPS在室内定位精度降低,以及UWB不适合室外定位的问题,实现了室内外交界处的无缝定位.蔡劲等[7]提出全球导航卫星系统(GNSS)与室内地磁指纹节点结合的室内外无缝定位方法,解决了室内外无缝定位不能平滑自动切换的问题.ZENG等[8]提出GNSS与基于手机的惯性导航相结合的方法,实现了室内外的无盲区导航.基于智能手机和平板电脑终端,ADELL等[9]提出WIFI和GNSS组合的智能室内外定位切换方法.但在复杂的室内外交界区域,卫星信号与无线信号都容易受到非视距误差的影响,仅采用手机内置GPS接收模块与UWB组合的定位方式并不能保证在任何地方都能实现较精准的定位,而基于手机的惯性导航技术不会受到这种环境的影响,可与GPS和UWB相互补充.本文作者利用手机中的惯性传感器,结合GPS和UWB系统,通过航迹推算,提高定位精度.
1 定位系统模型
1.1 室外定位模型
在进行室外定位测试时,选用安装在智能手机平台上的GPS工具箱记录定位数据,如图1所示.GPS工具箱可导出标记语言(KML)文件,借助KML文件可以查看实验过程中手机所处的经纬度数据,计算手机在模型场景中的坐标.
1.2 室内定位模型
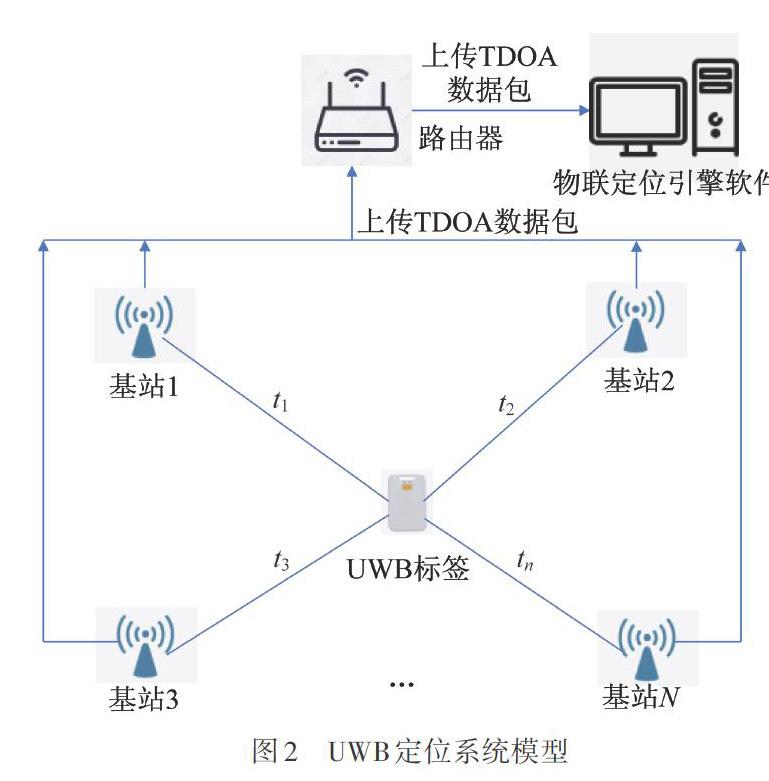
UWB定位技术是当前室内定位技术研究的热点[10].UWB定位系统由UWB标签、固定基站以及监控软件3部分组成,如图2所示.将UWB标签绑定在定位对象上,在定位过程中,UWB标签以一个固定频率间歇性地发出UWB脉冲信号,固定基站计算脉冲信号的传输时间,通过监控软件选取合适算法,計算定位对象的位置.
获取移动标签位置的基本定位方法主要有:信号强度指示(RSSI)、到达角度(AOA)、到达时间 (TOA)和到达时间差(TDOA)[11]定位方法,在室内环境下,RSSI定位方法成本较低、功率较小,但易受多径效应的干扰;AOA定位方法对硬件要求较高;TOA定位方法虽然可以满足精度要求,但难以满足硬件的时钟精度要求;TDOA是对TOA的改进方法,进行时钟同步时,不需要加入特定的时间戳.
1.3 室内外定位模型场景
为了研究室内外无缝定位算法,需要提前规划定位数据测试实验场景.以如图3所示的某大学信息楼四楼的楼顶天台作为实验的室外场景,如图4所示的走廊连接天台与室内UWB实验系统.初步实验结果表明:楼顶天台的GPS信号良好,天台与走廊交界处GPS信号较弱,走廊与室内实验室交界处UWB信号较弱,走廊中部GPS信号与UWB信号都很弱.故选楼顶天台、走廊及室内场景作为研究高精度室内外无缝定位的实验场景.
2 室内外定位算法原理
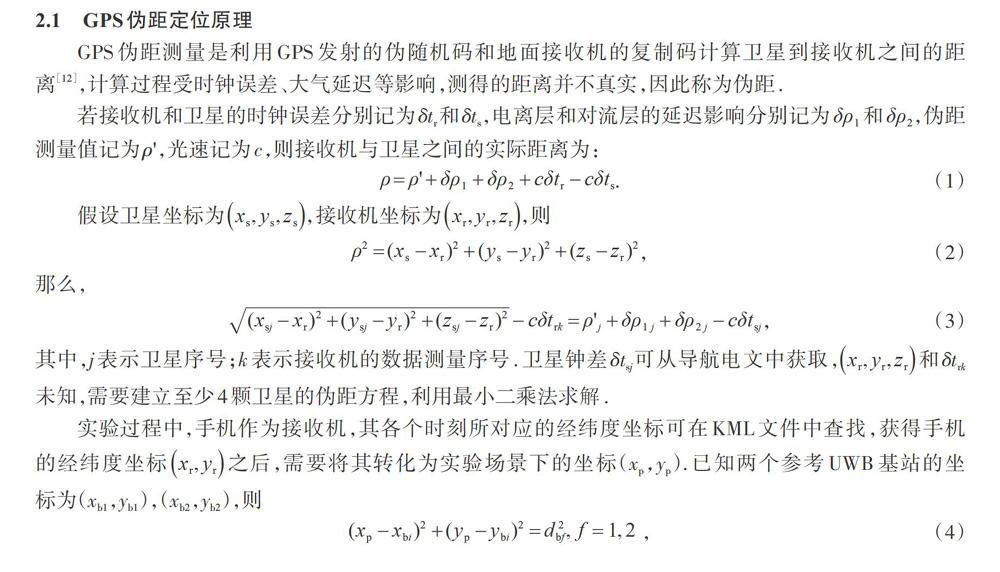
2.1 GPS伪距定位原理
GPS伪距测量是利用GPS发射的伪随机码和地面接收机的复制码计算卫星到接收机之间的距离[12],计算过程受时钟误差、大气延迟等影响,测得的距离并不真实,因此称为伪距.
3 室内外交界区域定位方法的切换策略
针对定位过程中部分路段定位轨迹缺失的问题,室内外无缝定位技术分为切换和融合两部分.在切换方法中,根据切换条件判断当前处于室内还是室外,某一时刻只会输出一种定位算法的结果;在融合方法中,系统不判断某一时刻所处位置,而是输出多个定位算法的综合结果.利用卫星数量、UWB基站数量以及定位信号的强度作为切换判断的参数指标.
在室外拟采用GPS定位,室内拟采用UWB定位,同时采用惯性导航系统,即加速度计和陀螺仪进行辅助定位.定位过程中,对卫星和UWB基站进行搜索,当卫星数量大于等于4时,将GPS数据作为最终定位时的参数.对于本实验所使用的UWB系统,当UWB标签发送和接收的定位包功率高于-90 dBm时,信号质量较好;低于-100 dBm时,信号质量较差.当UWB基站数量大于等于4,且这些基站接收到的定位包信号质量较好时,采用TDOA测量值作为最终定位计算时使用的数据;当卫星数量小于4,UWB基站数量也小于4时,采用手机自带的加速度计和陀螺仪所测数据作为最终定位时的参数.定位方法的切换流程如图7所示.
4 实验与结果分析
为了定量分析手机GPS和室内UWB系统的定位精度,需要将实验路线坐标化.在实验场景中标记地点,利用红外线测距仪、量角器等工具测量各标记点之间的实际距离,构建基于UWB系统基站坐标的实验路线,如图8所示.室外场景范围为A(-40.67 m,-13.87 m)至B(-32.13 m,6.74 m)路段;室内场景范围为E(-5.50 m,1.00 m)至F(12.00 m,1.00 m)路段;走廊范围为C(-24.58 m,9.00 m)至D(-8.00 m, 3.77 m)路段;左边圆圈所示区域为天台与走廊的交界区域,对应B至C路段;右边圆圈所示区域为走廊与室内UWB系统的交界区域,对应D至E路段.
在完成实验路线规划后,手持贴有UWB标签的手机,沿着规划的路线以正常的步行速度从室外走向室内进行实验.将实验过程中获得的GPS数据、加速度计数据以及TDOA值导入电脑.根据提出的室内外交界区域的定位方法进行策略切换,将手机GPS、惯性导航和UWB定位进行松散组合,得到优化的定位算法,定位轨迹如图9所示.
实验结果显示:GPS最大定位误差为4.20 m;在视距情况下,UWB信号较强,最大定位误差为0.54 m,平均定位误差为0.28 m.在天臺与走廊的交界处,将测得的GPS数据作为惯性导航的初始位置,得到定位轨迹,定位最大误差为3.10 m,定位平均误差为1.70 m.在走廊中部仅使用惯性导航进行定位,传感器自身误差以及实验过程中因手机抖动所产生的误差会不断积累,因此本实验忽略了陀螺仪数据的轻微变化,默认手机的移动方向与实际路线一致.经过计算得到走廊路段定位最大误差为1.43 m,定位平均误差为1.00 m.
5 结论
本文作者结合手机GPS、惯性导航技术和UWB技术,提出一种利用信号数量和信号强度为判断条件的切换策略,根据既定的行进路线,分析了室内外交界区域的定位情况.实验结果表明:利用切换策略优化后的定位算法进行位置计算,定位的效果较好.本研究在室内外无缝定位技术的切换思路上有一定的理论意义,在特定场合提升智能手机用户的定位体验感方面有一定的实践意义.但本实验只对定位数据作延时处理,定位的时效性有待提高.
参考文献:
[1] 曹冲.全球导航卫星系统发展与中国北斗系统建设 [J].科学,2018,70(3):21-24.
CAO C.Development of global navigation satellite system and construction of Chinas BeiDou System [J].Scinece,2018,70(3):21-24.
[2] 阮陵,张翎,许越,等.室内定位:分类、方法与应用综述 [J].地理信息世界,2015,22(2):8-14,30.
RUAN L,ZHANG L,XU Y,et al.Indoor positioning:classification,methods and applications [J].Geomatics World,2015,22(2):8-14,30.
[3] 闫大禹,宋伟,王旭丹,等.国内室内定位技术发展现状综述 [J].导航定位学报,2019,7(4):5-12.
YAN D Y,SONG W,WANG X D,et al.Review of development status of indoor location technology in China [J].Journal of Navigation and Positioning, 2019,7(4):5-12.
[4] 庄春华,赵治华,张益青,等.卫星导航定位技术综述 [J].导航定位学报,2014,2(1):34-40.
ZHUANG C H,ZHAO Z H,ZHANG Y Q,et al.Overview on seamless positioning technologies of satellite navigation [J].Journal of Navigation and Positioning,2014,2(1):34-40.
[5] 关维国,焦萌,孙福明,等.基于北斗伪距差分与WiFi的室内外融合定位方法 [J].传感器与微系统,2019,38(5):13-16.
GUAN W G,JIAO M,SUN F M,et al.Indoor and outdoor fusion localization method based on BeiDou pseudo-range difference and WiFi [J].Transducer and Microsystem Technologies,2019,38(5):13-16.
[6] 邬春明,耿强,刘杰,等.DGPS与UWB混合精确无缝定位技术研究 [J].传感器与微系统,2012,31(3):74-77.
WU C M,GENG Q,LIU J,et al.Research on combination of DGPS and UWB for accurate seamless positioning technology [J].Transducer and Microsystem Technologies,2012,31(3):74-77.
[7] 蔡劲,蔡成林,张首刚,等.GNSS/地磁组合的室内外无缝定位平滑过渡方法 [J].测绘通报,2018(2):30-34.
CAI J,CAI C L,ZHANG S G,et al.A smooth transition method for indoor and outdoor seamless positioning of GNSS/magnetic combination [J].Bulletin of Surveying and Mapping,2018(2):30-34.
[8] ZENG Q,WANG J,MENG Q,et al.Seamless pedestrian navigation methodology optimized for indoor/outdoor detection [J].IEEE Sensors Journal,2018,18(1):363-374.
[9] ADELL M C,GONZ?LEZ J P.Smart indoor-outdoor positioning handover for smartphones [C]//International Conference on Indoor Positioning and Indoor Navigation.Montbeliard-Belfort:IEEE,2013:1-7.
[10] 丁亚男,张旭,徐露.基于UWB的室内定位技术综述 [J].智能計算机与应用,2019,9(5):91-94.
DING Y N,ZHANG X,XU L.Overview of indoor positioning technology based on UWB [J].Intelligent Computer and Applications,2019,9(5):91-94.
[11] 赵红梅,赵杰磊.超宽带室内定位算法综述 [J].电信科学,2018,34(9):130-142.
ZHAO H M,ZHAO J L.An overview of ultra-wide band indoor positioning algorithms [J].Telecommunications Science,2018,34(9):130-142.
[12] 徐绍铨,张华海,杨志强,等.GPS测量原理及应用 [M].3版.武汉:武汉大学出版社,2008.
XU S Q,ZHANG H H,YANG Z Q,et al.Measuring Principle and Applications of GPS [M].3rd ed.Wuhan:Wuhan University Press,2008.
[13] 王瑞荣,郑书万,陈浩龙,等.一种基于Taylor和Kalman的室内协同定位方法 [J].传感技术学报,2014,27(11):1557-1561.
WANG R R,ZHENG S W,CHEN H L,et al.A cooperative localization method based on Taylor and Kalman algorithms [J].Chinese Journalof Sensorsand Actuators,2014,27(11):1557-1561.
[14] 仪玉杰,黄智刚,苏雨.一种UWB与PDR融合的行人室内定位方法 [J].导航定位学报,2019,7(3):38-43,50.
YI Y J,HUANG Z G,SU Y.A method of pedestrian indoor positioning combined UWB with PDR [J].Journal of Navigation and Positioning,2019,7(3):38-43,50.
(责任编辑:包震宇)
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
宇航计测技术(2018年3期)2018-09-08
雷达学报(2018年3期)2018-07-18
电子测试(2018年11期)2018-06-26
雷达学报(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
电子器件(2015年5期)2015-12-29
东北电力大学学报(2015年1期)2015-11-13
