
高速列车悬挂系统连续混合控制策略的设计与仿真分析
2021-03-31 07:29廖英英陈祖晨刘永强赵义伟
振动与冲击 2021年6期
廖英英,陈祖晨,刘永强,赵义伟
(1.石家庄铁道大学 省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄 050043;2.石家庄铁道大学 土木工程学院,石家庄 050043;3.石家庄铁道大学 交通运输学院,石家庄 050043;4.石家庄铁道大学 机械工程学院,石家庄 050043)
半主动控制以耗能少、结构简单、可靠性高、容易实现等优点而成为振动控制领域的研究热点之一[1-3],近年来在乘用车的悬架控制中有较多的研究[4-7]。
在半主动控制策略的研究中,天棚阻尼控制、加速度驱动控制等以信号反馈为基础的控制算法应用最为广泛,其最大的特点是不需要模型参数和路面激励方面的先验知识,只需要测量系统的振动响应(位移、速度或加速度信号)即可实现有效控制,因而容易实现且计算速度快、反应迅速[8-10]。
上述几种传统的控制策略大多为开关型控制,对可调式阻尼器的要求比较低,只需要实现开闭即可(如电磁阀式液压阻尼器),但其控制效果受执行机构性能(反应速度、鲁棒性等)的影响很大,而且在高频范围内控制效果差[11-12]。相比开关型控制,连续型半主动控制的效果更接近理想的天棚阻尼,但需要线性可调的阻尼器(如磁流变阻尼器、电流变阻尼器等)。目前,现有文献对线性连续型控制策略的研究不足,本文在前人研究的基础上,提出一种连续型混合控制策略,可提高半主动控制在中高频区域内的控制效果。
1 车辆动力学模型


图1 铁道车辆1/4横向模型Fig.1 Aquartercar model
模型主要简化了以下方面:①未考虑轮对与钢轨间的接触问题,假设车轮与钢轨始终保持接触,使得轨道激励幅值与轮对横向位移始终方向相同、大小相等;②忽略了轮对及其它簧下质量的影响;③忽略了轴箱转臂节点、空气弹簧的横向阻尼作用;④忽略了二系横向减振器的节点刚度的影响。
模型的运动微分方程可表示为
(1)
kp(yb-yr)=0
(2)
在检验半主动悬挂的性能时,需要考虑可调式阻尼器的反应时间,其反应时间的大小直接影响。因此,实际阻尼系数cs与理想阻尼系数cd可近似表示为低通滤波器的形式
(3)
式中:cs满足cmin≤cs≤cmax;β为用于半主动控制减振器的带宽,本文采用的磁流变减振器反应时滞约为170 ms(见图2),因此取β=6π。cmin和cmax分别为半主动控制减振器所能提供的最小和最大阻尼系数,对于成品减振器来说这两个值是固定值。对于本文所采用的磁流变减振器,cmin和cmax分别取500 N·s/m和1×105N·s/m。

图2 磁流变阻尼器反应时滞测量Fig.2 React time delay of MR dampers
根据某型380 km级动车组动力学参数确定该模型的参数,如表1所示。

表1 铁道车辆模型主要参数Tab.1 The main parameters of vehicle model
横向止挡的作用主要是防止车体与构架间的横向位移过大,其刚度特性曲线如图3所示。

图3 横向止挡的刚度特性曲线Fig.3 The stiffness curve of lateral stop
2 半主动控制策略设计

(4)


(5)
式中,M为每个单频激励下系统响应数据点的总个数(仅限用于计算的数据点,为了使计算精确,一般忽略仿真开始时的瞬态响应部分,只截取后半部分稳态响应数据进行计算)。
目前,在轨道激励未知的情况下,通常使用的半主动控制策略包括:
(1)天棚阻尼(skyhook,SH)控制
SH控制策略是理想“天棚”概念的近似实现,包括开关(on-off)控制和线性连续控制两种类型。on-off型SH控制策略表达式为
(6)
线性连续型SH控制策略表示为
(7)

on-off型SH控制的实现只需要可调式阻尼器提供“开”和“关”两种状态即可,可以粗略地实现理想天棚阻尼的控制效果,比较适合电磁阀式减振器使用。线性连续型SH控制可以提供介于[cmin,cmax]的阻尼系数,更加接近理想天棚阻尼的控制效果,比较适合磁流变阻尼器这类连续可调的减振器。需要强调的是,只要电磁阀式减振器的切换速度足够快,两者的控制效果是接近的。
利用式(5)表示的近似频率响应计算方法,对比on-off型和线性连续型SH控制的性能,如图4所示。本文采用正弦激励zr(t)=asin(2πft),幅值a=0.05 m,频率f的范围为0.2~30 Hz,频率步长0.1 Hz。仿真时长为20 s,时间步长0.001 s。图4中,α在[0~1]内取值,步长0.1。

图4 α值对线性连续型SH控制效果的影响Fig.4 Effect of α values on the performance of linear continuous SH control
图4显示:在低频范围内(小于一阶固有频率),α值对控制效果几乎没有影响。在中高频范围内(高于一阶固有频率),除了二阶固有频率附近外,α值越小,控制效果越好。在二阶固有频率附近,α值越大,控制效果越好,尤其是当α=0和0.1时曲线存在很大的峰值。因此,本文选取α=0.2时的线性连续型SH控制用于后续仿真分析。
(2)加速度驱动(acceleration-driven-damper,ADD)控制
on-off型ADD控制策略表达式[14]为
(8)

利用线性连续型SH控制策略的设计方法,得到线性连续型ADD控制策略
(9)

根据近似频率响应计算方法,绘制参数γ在[0~1]范围内取值时(步长0.1)的ADD控制性能曲线,并与on-off型ADD控制进行对比,如图5所示。需要说明的是:在低频区域内(小于1 Hz),几种类型的控制效果几乎完全相同,因此在图5中没有予以显示。
从图5可知,在2~10 Hz内,γ值越大,控制效果越好,但变化不大;在系统二阶固有频率附近,γ值过小容易导致共振,尤其是γ=0~0.3时曲线出现了较大的峰值;在高于二阶固有频率的高频范围内,γ值越小,控制效果越好,且变化比较明显,γ=0时控制效果最好。综合来看,γ=0.4时的控制效果无论在低频还是高频范围内都表现较好。因此,本文采用γ=0.4时的线性连续型ADD控制用于后续仿真分析中。
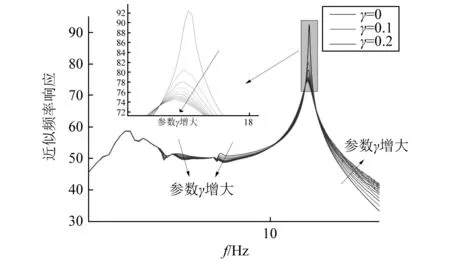
图5 γ值对线性连续型ADD控制效果的影响Fig.5 Effect of γ values on the performance of linear continuous ADD control

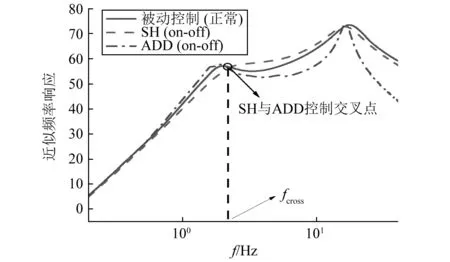
图6 对比on-off型SH,ADD与被动控制效果Fig.6 Performance comparison of on-off SH,ADD and passive controls
从图6表示的on-off型半主动控制与被动控制的对比图中可以看出,在低频区域(低于一阶固有频率),SH控制最好,被动控制次之,而ADD控制效果最差;而在中频区域(介于一阶和二阶固有频率之间),ADD控制效果最好,被动控制次之,SH控制最差;在高于二阶固有频率的高频区域内,ADD仍然保持最好的控制效果,SH控制稍优于被动控制。此处,需要说明的是:如果用于半主动控制的阻尼器(本文为磁流变阻尼器)的反应时滞更小的话(即反应速度更快),SH控制的效果能表现的更好一些,至少会接近被动控制。
另外,在图6中可以明显地发现,在一阶固有频率附近,on-off型SH与ADD控制有一个交叉点(fcross=2.194 Hz),在低于该点的频率范围内SH控制效果最好,在高于该点的频率范围内ADD控制效果最好。针对这种有意思的现象,Savaresi提出了混合半主动控制(mixed SH-ADD)的概念,通过将开关型SH和开关型ADD结合起来,以期实现最优的控制效果。图7为被动控制、on-off型SH、on-off型ADD、on-off型混合控制的控制性能对比曲线。
从图7中可以看到,对于on-off型混合控制,可以明显地看到在低频区域内其性能与SH接近,而在中高频区域内性能则接近ADD控制。由此可见,on-off型混合控制完美地继承了on-off型SH和ADD的优点、规避了它们各自的缺点,使其控制性能达到相对最优。

图7 对比on-off型SH,ADD,混合控制与被动控制效果Fig.7 Performance comparison of on-off SH,ADD,mixed SH-ADD and passive controls
本文在文献[13]的基础上,提出连续型混合控制(mixed continuous SH-ADD)的概念,控制策略的具体表达式为
定义:
控制策略:
IF switch_index>0
if ADD_index>0
else
cd=cmin
end
ELSE
if SH_index>0
else
cd=cmin
end
END
注:切换系数ρ=2πfcross,该值与模型参数有关,与激励无关。
基于近似频率响应的计算方法,对比连续型SH、连续型ADD和连续型SH-ADD控制与被动控制的控制效果,如图8所示。

图8 对比线性连续型SH,ADD,混合控制与被动控制效果Fig.8 Performance comparison of on-off SH,ADD,mixed SH-ADD and passive controls
从图8中可以看到,线性连续型SH与ADD在频率fcross=2.226 Hz处存在交叉。在低频阶段SH性能最佳,混合控制接近SH控制效果,ADD最差,被动控制表现中等;在中高频阶段,ADD最优并与混合控制性能接近,SH控制次之,三者的表现均明显优于被动控制。混合控制能够实现在全频段内均能保持良好的性能,在交叉点fcross附近能够很好地过渡,且整体表现优于SH和ADD控制。由此可见,线性连续型混合控制基本达到了预期的控制效果。
为了更进一步说明线性连续控制的效果,再对比on-off型混合控制、线性连续型混合控制与被动控制的近似频率响应曲线,如图9所示。

图9 对比on-off型、线性连续型混合控制与被动控制效果Fig.9 Performance comparison of passive,on-off and continuous mixed SH-ADD controls
从图9中可以看到,在全频段内,混合控制效果均明显优于被动控制;在低频区域(低于一阶固有频率)内,on-off型混合控制与线性连续型混合控制效果基本相同;在中高频区域(高于一阶固有频率)内,线性连续型混合控制与on-off型相比存在优势,尤其是在高于二阶固有频率的高频范围内,其表现更加出色。
3 仿真分析
3.1 单频激励时域分析
前面针对单频激励的分析主要集中在频域中,下面从时域角度进行对比说明。为了对比分析几种控制策略在全频段内的时域特征,分别选择单频激励频率f=1,6,30 Hz时的车体横向加速度时域曲线进行对比,如图10所示。

图10 单频激励频率分别为1 Hz,6 Hz和30 Hz时几种控制下车体加速度时域对比Fig.10 Car body time response of several controls to single pure-tone disturbances (at 1 Hz,6 Hz and 30 Hz)
从图10中可见,在激振频率为1 Hz(低于系统一阶固有频率)时,与被动控制相比,混合控制的效果有限,可降低车体横向加速度峰值28.57%,且on-off型与线性连续型混合控制下的曲线基本重合;激振频率为6 Hz(介于一阶与二阶固有频率之间)时,与被动控制相比,半主动混合控制效果表现优异,至少可降低加速度峰值35.03%,其中线性连续型混合控制的效果较on-off型可提升9.52%;激振频率为30 Hz(高于二阶固有频率)时,与被动控制相比,半主动混合控制的效果更加显著,至少可降低加速度峰值74.65%,其中线性连续型混合控制又较on-off型提升32.22%。由此可见,混合型半主动在全频段内的控制效果均非常显著,尤其是在中高频区域内更显优势,线性连续型混合控制效果较on-off型有明显提升。
3.2 宽频激励仿真分析
为了分析本文提出的线性连续型半主动控制策略在复杂随机轨道激励上的适用性,采用中国高速铁路轨道不平顺作为激励,相关标准及模拟方法参见文献[15]。横向轨道不平顺随机激励时域信号如图11所示。

图11 中国高速铁路轨道横向不平顺数值模拟曲线Fig.11 Numerical simulation curves of China high-speed railway irregularities
根据仿真结果,计算不同控制策略作用下车体加速度的功率谱密度曲线,并进行对比,如图12所示。需要注意的是:本小节中采用的是宽频激励,已不再适用于式(4)所示的单频激励情况。本节中的曲线纵坐标直接采用车体横向加速度功率谱密度的对数值,因此该曲线的交叉频率值会与第2章中的结果不同,此为正常现象。

图12 中国高速轨道不平顺激励时不同控制策略作用下的车体横向加速度功率谱密度曲线对比Fig.12 Comparison of car body lateral acceleration PSD under different semi-active controls when China high-speed railway irregularities is used
从图12(a)中可以看到,对于on-off控制,在小于交叉频率(0.96 Hz)范围内,SH控制效果最好,被动悬挂效果居中,ADD控制效果最差;在中频范围内(1~16.7 Hz),ADD控制效果最好,SH控制与被动悬挂效果相当;在高频范围内(大于系统二阶固有频率),ADD控制效果较差,而SH控制与被动悬挂效果基本一致;而on-off型SH-ADD混合控制在低频和高频区域内,效果基本与SH控制类似,而在中间频率范围内,控制效果接近ADD控制。因此,从全频段范围来看,on-off型SH-ADD混合控制效果优于on-off型SH和ADD控制。
从图12(b)中同样可以看到,从在全频段范围内来看,线性连续型SH-ADD混合控制效果优于线性连续型SH和ADD控制。
3.3 整车仿真
为了检验新型控制策略的有效性,有必要应用于高速动车组整车模型中进行仿真验证。在UM软件中建立高速动车组车辆模型,该整车车辆模型的参数与本文1/4车模型相同(表1),采用中国高速轨道谱激励,直线轨道,模拟运行速度300 km/h,仿真步长0.001 s,时长30 s。
对比on-off型SH,ADD和SH-ADD混合控制,线性连续型SH,ADD,SH-ADD混合控制作用下的横向平稳性指标(sperling index)、车体最大加速度值(maximum)和车体加速度均方根值,如表2所示。

表2 不同控制策略下车体横向加速度的动力学评价指标对比Tab.2 Comparison of dynamic performance under different control strategies
从表2中可以发现,与被动悬挂相比,几种半主动控制策略均能有效降低平稳性指标,最大降幅超过36%;与开关控制相比,线性连续型半主动控制的效果更胜一筹,控制效果最大可提高43%(ADD-maximum);从三种评价指标的控制效果来看,线性连续型SH-ADD混合控制均表现最好,其次是开关型SH-ADD混合控制;与开关型混合控制相比,线性连续型混合控制最大可提高23%。综上所述,本文提出的线性连续型SH-ADD控制的效果比较明显。
为了更加直观地观察振动幅值的控制效果,对比被动控制、开关型和连续型SH-ADD混合控制下的车体横向加速度时域和功率谱密度曲线,如图13所示。

图13 整车模型仿真结果对比Fig.13 Comparison of simulation results for whole car model
从图13(a)中可以看到,与被动悬挂相比,开关型SH-ADD混合控制能大幅降低车体加快速度幅值,但会增加高频振动成分(即高频颤振现象),这是由开关型控制策略自身的特性决定的,在控制过程中阻尼系数只能在Cmax和Cmin间切换,非此即彼,而大阻尼状态时无法有效抑制高频振动,因此在高频区域内开关型控制效果都不太好;与开关型控制相比,连续型SH-ADD混合控制下车体加速度幅值会更低,而且调节的阻尼系数可以在Cmax和Cmin间随意取值,不必每次都调节到Cmax的高度,所以可以使高频振动成分明显得到抑制。
从图13(b)中可以观察到,在低于3 Hz的低频区域内,被动悬挂的效果较好,在中高频区域内则振动加剧;与被动控制相比,开关型SH-ADD混合控制在低频范围内较差,但在中高频区域内则控制效果较好;在低于一阶固有频率(约1 Hz)的范围内,线性连续型SH-ADD控制的效果接近被动控制,在高于一阶固有频率的范围内,控制效果明显优于被动和开关型混合控制;需要说明的是:线性连续型混合控制在一阶固有频率附近出现了大于被动悬挂和开关型控制的峰值,这是第2章中所述切换参数α和γ的选择造成的,这也是提高在其他频率范围内控制效果的一种代价。总体来看,线性连续型SH-ADD控制在全频段内的控制效果均较好。
4 结 论
(1)根据国内某型高速列车的动力学参数,采用两自由度的1/4车模型设计了一种线性连续型SH-ADD控制策略,并以抑制车体加速度为目标进行动力学仿真分析。
(2)采用两自由度模型,分别从单频谐波激励和宽频随机激励角度,对比分析了被动控制、开关型和连续型等7种情况下的时域和频域响应情况。
(3)运用UM软件,采用国内某型高速列车的整车动力学模型对SH、ADD和SH-ADD等几种半主动控制的开关型和连续型策略下的悬架控制效果进行仿真,通过对比Sperling指标、车体最大加速度和加速度均方根值等指标,证明了新型线性连续SH-ADD控制的良好控制效果。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
黑龙江大学自然科学学报(2022年4期)2022-11-17
装备制造技术(2020年11期)2021-01-26
工业安全与环保(2020年10期)2020-11-05
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
四川建筑(2018年4期)2018-09-14
汽车工程学报(2015年6期)2016-03-23
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
浙江大学学报(工学版)(2015年2期)2015-05-30
噪声与振动控制(2015年4期)2015-01-01
