基于条件随机场的驾驶行为识别研究
2021-04-02 12:06赵岩陈焕明王亚伦
青岛大学学报(工程技术版) 2021年1期
赵岩 陈焕明 王亚伦


摘要: 为深入研究驾驶员驾驶行为特性,减少驾驶辅助系统与驾驶员的控制冲突,本文基于条件随机场(conditional random field, CRF)算法,搭建了驾驶员驾驶行为识别模型。利用NI Phar Lap ETS实时操作系统,搭建车道保持辅助控制试验平台,在试验平台上进行相关参数的实时采集,并根据采集到的数据特性,提出一种根据横向位移对驾驶行为数据进行分段的方法,将采集到的数据样本划分为左换道、右换道以及车道保持阶段。同时,对实时获取的参数进行显著性分析,将与横向运动密切相关的五种参数作为观测参数,对驾驶行为进行识别。研究结果表明,车道保持、左换道以及右换道行为的识别率分别达942%,93%和844%。该研究对于提高车道保持辅助系统的辅助效果以及减少误警率具有明显的促进作用。
关键词: 驾驶行为; 条件随机场; 驾驶模拟器; 观测参数; 实时系统
中图分类号: TP391.41; U467.5+1文献标识码: A
作者简介: 赵岩(1993-),男,山东济宁人,汉族,硕士研究生,主要研究方向为高级辅助驾驶技术。
通信作者: 陈焕明(1978-),男,山东青岛人,博士,讲师,硕士生导师,主要研究方向为汽车动态仿真与控制技术。 Email: qdchm@qdu.edu.cn
近年来,智能车辆的发展成为减少交通事故的理想方案。据世界卫生组织公布数据显示[1],全球每年因交通事故造成的死亡人数高达135万。作为智能车辆发展的重要部分,车道保持辅助技术的研发引起了我国的高度重视,于2017年发布了《汽车工业中长期发展规划》。对驾驶员驾驶意图的有效识别,可以提高车道保持系统的辅助效果。单纯依靠偏离距离来进行车道偏离的判断有严重的滞后性,易与驾驶者产生控制冲突。随着深度学习的快速发展,针对上述问题,部分学者提出多种驾驶意图识别算法,基于神经网络的驾驶意图识别,将车辆参数和驾驶员行为参数导入神经网络中,通过对中间隐层层数和节点个数的调整,搭建意图识别模型[24]。基于隐马尔可夫模型(hidden markov model,HMM)的驾驶意图识别,将一段时间序列的观测参数作为输入,训练出不同驾驶意图下的子模型[58]。而基于支持向量机(support vector machine,SVM)的驾驶意图识别模型,通过核函数φ将观测参数映射到高维空间,然后求解出能分隔驾驶意图所对应的观测参数的超平面,从而建立相应的驾驶意图识别模型[912]。基于HMM的驾驶意图识别模型在建模时,需要较强的严格独立的假设条件[1315],而基于SVM的驾驶意图识别模型则对样本数量有要求[16],该方法对小样本、非线性以及高维模式識别问题识别效果较好。鉴于上述存在的问题,周俊生等人[1719]采用条件随机场(conditional random field, CRF)算法,搭建驾驶意图识别模型,该方法不需要严格的独立性假设,对样本数量没有严格限制。基于此,本文综合利用CarSim、Matlab/Simulink和NI VeriStand软件,搭建车道保持辅助控制试验平台,采集驾驶员驾驶行为数据及车辆横向运动数据,进行驾驶员驾驶意图识别模型的训练及其验证。该研究对减少交通事故的发生具有重要意义。
1试验设计
实车数据采集方法需要对测试车辆进行改装,加装数据采集设备以及相应的传感器(如车载摄像机、毫米波雷达、陀螺仪等),对测试天气及道路环境具有较高的要求和一定程度的危险性。而研发型驾驶模拟器能够将相关硬件嵌入其中,进行驾驶员主观评价以及算法验证,试验周期短,试验条件可控,安全性高。本文基于NI公司的Phar Lap ETS实时操作系统,搭建车道保持辅助控制试验平台,车道保持辅助控制试验平台如图1所示。该试验平台能够根据试验要求,在CarSim软件中搭建真实的驾驶场景,利用NI VeriStand实时测试软件实现硬件I/O端口的实时配置,对车辆动态参数、行驶环境参数以及驾驶员驾驶行为数据进行实时采集。
根据《公路工程技术标准》,搭建10 000 m单向双车道直道场景,考虑到需要以较高车速行驶,为提高驾驶场景与现实道路场景的相似度,将左右车道宽度均设置为375 m。在道路中央,每隔500 m设置锥形桶,提示驾驶员进行换道操作,换道时机由驾驶者自主决定,试验道路布置如图2所示。
近年来,由于非职业驾驶员数量的急剧增加,其已成为交通事故剧增的主要群体,主要原因是一些驾驶新手的驾驶水平较低,缺乏对驾驶环境的准确判断,难以做出适当的驾驶行为,易发生交通事故。因此,本文招募了10名驾龄在2~5年的男性驾驶员,驾驶员需满足以下条件,即持有驾驶证、性格稳定、近期具有实车驾驶经历。试验前,对驾驶员进行一定时长的培训,使驾驶员熟悉试验平台以及道路场景,避免因操作失误造成数据采集异常。为深入研究驾驶行为与驾驶意图的潜在关系,将采样率设置为100 Hz,某时间段内采集的数据如表1所示。
2驾驶行为分析
驾驶行为的有效识别对于车辆感知系统提前感知行驶环境,做出准确的路径规划以及辅助控制具有重要作用。驾驶过程是连续多变的动态变化过程,不同的驾驶行为会引起不同的车辆动态参数和驾驶行为参数变化,因此可以通过选取适当的参数,对不同的驾驶行为进行预测及识别,驾驶行为数据的划分及驾驶意图表征参数的选取直接影响识别的准确度。
2.1驾驶行为数据的划分
选定的观测变量是否能有效区分换道状态与车道保持状态,与观测数据的划分以及识别参数的选取密切相关。目前,对于换道行为数据与车道保持行为数据的划分没有统一的定义,为提高换道行为的识别率,从采集到的数据特征出发,提出一种根据横向位置来划分数据的方法,换道阶段数据划分示意图如图3所示。首先根据采集到的数据分别计算出车辆行驶在左车道和右车道的车辆横向位置的均值,然后选取换道过程中横向位置数据符号变化的两点,绘出阶段划分线,该线与左右车道车辆横向位置均值线有两个交点,将两个交点间的数据作为换道阶段的数据,交点以外的数据作为车道保持阶段数据。
2.2驾驶意图表征参数的选取
在实际驾驶过程中,驾驶员驾驶行为会受到多方面的影响。在人-车-路构成的闭环系统中,任意环节的细微变化都会造成驾驶行为的改变,随机性较大,无法对其精确建模。通过相关研究发现,在一些特定的驾驶场景中,驾驶过程中产生的车辆运动参数、驾驶员行为参数以及道路环境参数的变化可以在一定程度上反映驾驶者的驾驶行为,通过传感器获取可以表征驾驶行为的参数,可以有效的识别驾驶员的驾驶意图。
本文获取了车道保持阶段与车道变更阶段的相关参数,并对相关参数的均值和标准差进行对比,考虑到过多的观测参数会加大驾驶意图识别模型的学习难度,影响意图识别的时效性,并且换道对横向运动参数影响较大,因此选取方向盘转角(°)、方向盘转角速率(°/s)、横向速度(km/h)、横向加速度(m/s2)以及横向位置(m)作为观测特征参数。
参数选定后,需要检验所选参数是否能够表征不同的驾驶意图,即进行显著性检验。在驾驶意图识别过程中,各观测变量的差异性越大,识别的精确度越高。因此,选取的五种观测参数对应不同的驾驶意图应该具有显著差别。利用箱式图分析五种参数在左换道、车道保持、右换道三种驾驶行为下的差异性,各参数箱式图如图4所示。
由图4可以看出,左右换道阶段的数据与车道保持阶段数据差异性非常明显,在车道保持阶段,驾驶员为使车辆在车道中间行驶,会对方向盘进行微调,因此方向盘转角、方向盘转角速率、横向速度、横向加速度以及横向位置的波动范围较小。在换道阶段,车辆发生横向位置的改变,因此方向盘转角、方向盘转角速率、横向速度、横向加速度以及横向位置都会发生大范围的波动,与车道保持阶段具有明显的差异性。因此,选取的五种观测参数可以很好的表征三种驾驶意图。
3换道意图识别模型的搭建
CRF模型是在最大熵模型(maximum entropy model,MEM)和HMM的基础上,提出的一种判别式概率无向图学习模型,是一种用于标注和切分有序数据的条件概率模型。条件随机场模型解决了HMM的观测独立性假设,因而可以容纳任意的上、下文信息,并且特征设计灵活,可在全局范围内统计归一化的概率。
本研究将驾驶状态分为车道保持、左换道和右换道三种,因此nStates=3。由上文可知,选取与换道行为相关的五种横向运动参数作为观测值,因此D=5。机场模型是一种判别式概率无向图学习模型,在有限的样本条件下,也可以得出较高的识别率,CRF算法识别驾驶意图流程如图6所示。
3.2驾驶意图识别与验证
在Matlab软件中,搭建基于liner-chain CRF算法的驾驶意图识别模型,并在该软件中进行模型训练与测试。根据第三章对于观测数据划分方法,为识别驾驶员完整的换道行为,提取从车道保持阶段到换道阶段再到车道保持阶段的数据作为输入样本,根据采集到的观测数据特性以及驾驶员的平均换道时间,以换道阶段左交点前4 s左右的观测数据为起始点,向后取10 s为一组样本,一组样本包含两次车道保持和一次换道,通过对采集到的数据进行筛选,得含完整换道行为数据样本84组,按照3∶1的比例划分为训练数据和测试数据,数据集如表3所示。
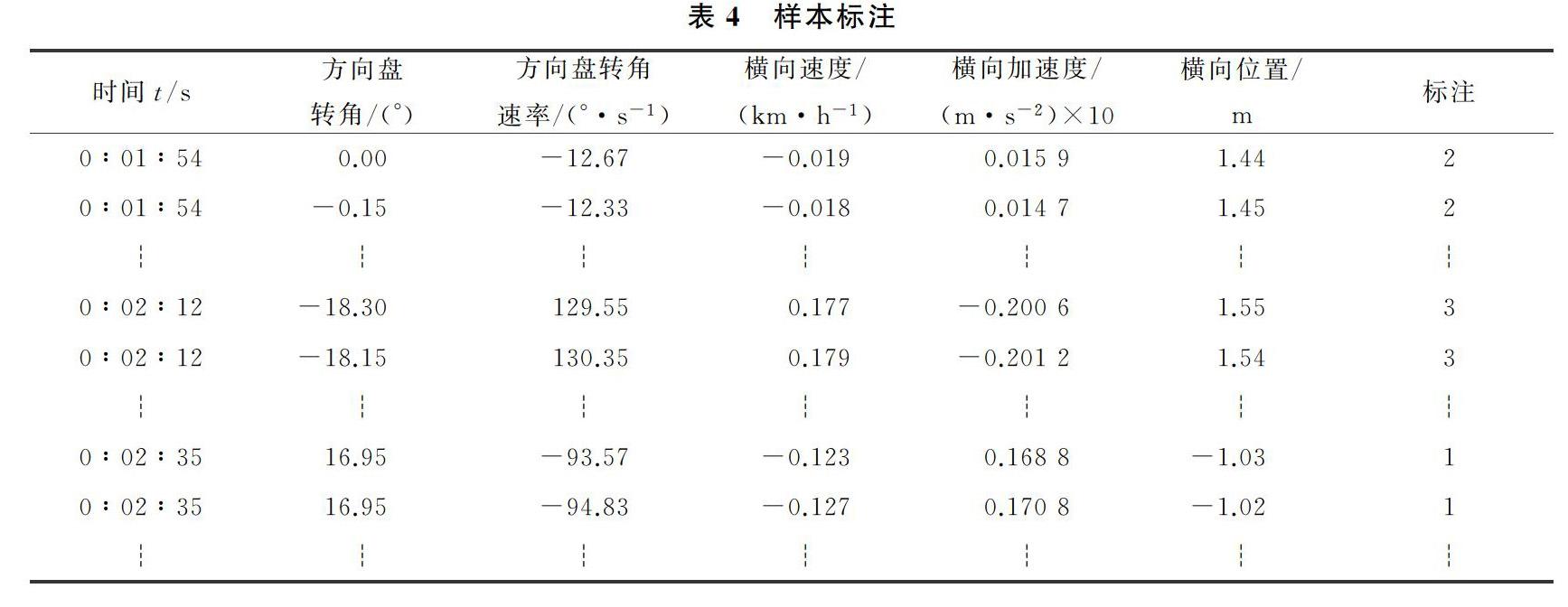
根据CRF算法特性,需对不同的驾驶行为阶段数据进行标注,根据横向位置划分驾驶行为数据的方法,对筛选出的完整驾驶行为数据进行标注,即将右换道阶段的数据标注为“3”,车道保持阶段的数据标注为“2”,左换道阶段的数据标注为“1”。样本标注如表4所示。
根据上文所述,将标注好的数据集导入liner-chain CRF驾驶意图识别模型中,其中一组为左換道数据测试结果,CRF识别结果如图7所示。图7中,“LK”代表车辆处于车道保持状态,“RLC”表示车辆处于左换道状态,CRF识别的驾驶状态由计算出的车道保持概率决定,当概率值小于50%时,认定此时处于换道状态,当大于50%时,认定处于车道保持状态,但在概率值接近05的位置会出现识别异常,通过减少观测参数,将观测参数改为方向盘转角、方向盘转角速率、横向速度以及横向加速度,即D=4,改进后识别结果如图8所示。
由图8可以看出,适当减少观测参数的数量,有益于提高识别精度,减少驾驶意图识别时间。
将测试样本导入训练好的驾驶意图识别模型中,测试结果如表5所示。
由表5可以看出,驾驶员驾驶行为识别liner-chain CRF模型在样本量较小的情况下,也可以达到较高的识别精度,在以横向位置划分驾驶行为数据的情况下,划分车道保持和左换道行为识别率达90%以上,右换道意图的识别率达84%,鉴于驾驶行为数据的划分以及驾驶意图表征参数的选取对识别精度的直接影响,考虑可能是由于拟合点较少,拟合精度低造成右换道阶段数据划分误差较大,使右换道识别率较低。
4结束语
本文搭建了基于线性链条件随机场驾驶意图识别模型,并通过采集到的数据,提出了一种根据横向位置划分时间序列的方法。与传统的驾驶意图识别算法相比,该驾驶意图识别模型对训练样本数量的要求更低,且更符合实际情况。通过模型训练与测试,该模型能够有效识别车道保持、左换道以及右换道三种驾驶意图。针对右换道意图识别率较低的问题,下一步将从驾驶意图识别算法的改进和驾驶行为阶段划分方法的优化两方面进行研究。
参考文献:
[1]World Health Organization. Global status report on road safety[R]. Geneva: WHO, 2018.
[2]倪捷, 刘志强. 基于驾驶人决策机制的换道意图识别模型[J]. 交通运输系统工程与信息, 2016, 16(1): 58-63.
[3]刘松波, 白国振. 基于BP神经网络的HEV加速意图识别[J]. 农业装备与车辆工程, 2017, 55(10): 88-91.
[4]曲代丽. 基于模糊神经网络的驾驶员制动意图辨识技术研究[D]. 长春: 长春工业大学, 2016.
[5]刘志强, 吴雪刚, 倪捷, 等. 基于HMM和SVM级联算法的驾驶意图识别[J]. 汽车工程, 2018, 40(7): 858-864.
[6]Li K, Wang X, Xu Y, et al. Lane changing intention recognition based on speech recognition models[J]. Transportation Research Part C Emerging Technologies, 2016, 69(8): 497-514.
[7]宋晓琳, 郑亚奇, 曹昊天. 基于HMM-SVM的驾驶员换道意图辨识研究[J]. 电子测量与仪器学报, 2016, 30(1): 58-65.
[8]冯颉. 面向汽车安全辅助系统的驾驶员意图识别算法研究[D]. 成都: 电子科技大学, 2013.
[9]李慧, 李晓东, 宿晓曦. 一种优化参数的支持向量机驾驶意图识别[J]. 实验室研究与探索, 2018, 37(2): 35-39.
[10]毕胜强, 梅德纯, 刘志强, 等. 面向驾驶行为预警的换道意图辨识模型研究[J]. 中国安全科学学报, 2016, 26(2): 91-95.
[11]刘志强, 涂孝军, 汪澎. 面向驾驶员辅助系统的换道意图辨识方法研究[J]. 安全与环境学报, 2015, 15(6): 132-136.
[12]麻婷婷, 涂孝军, 朱伟达. 基于支持向量機的驾驶员超车意图识别[J]. 上海工程技术大学学报, 2016(30): 203-208.
[13]张明恒, 翟晓娟, 朱有明, 等. 基于改进HMM的驾驶疲劳险态识别方法[J]. 大连理工大学学报, 2018, 58(2): 194-201.
[14]徐婷, 温常磊, 张香, 等. 基于GMM-CHMM的城市道路换道行为识别[J]. 交通运输系统工程与信息, 2020, 20(1): 61-67.
[15]张海伦, 付锐. 高速场景相邻前车驾驶行为识别及意图预测[J]. 交通运输系统工程与信息, 2020, 20(1): 40-46.
[16]马国成, 刘昭度, 裴晓飞, 等. 基于模糊支持向量机的旁车道车辆并线意图识别方法[J]. 汽车工程, 2014, 36(3): 316-320.
[17]周俊生, 戴新宇, 尹存燕, 等. 基于层叠条件随机场模型的中文机构名自动识别[J]. 电子学报, 2006, 34(5): 804-809.
[18]叶子豪, 孙锐, 王慧慧. 基于全卷积神经网络与条件随机场的车道识别方法[J]. 光电工程, 2019, 46(2): 180274-180286.
[19]徐晓芳. 基于条件随机场的中文分词技术的研究与实现[D]. 南京: 南京邮电大学, 2018.
[20]Schmidt M, Swersky K. Matlab code for chain-structured conditional random fields with categorical features [EB/OL]. https: ∥www. cs. ubc. ca/~schmidtm/Software/crfChain. html, 2008.
Abstract: In order to deeply explore the characteristics of the driver's driving behavior and reduce the control conflict between the driving assistance system and the driver, this paper builds a driver's driving behavior recognition model based on the Conditional Random Field algorithm. It use NI Phar Lap ETS real-time operating system to build a lane keeping auxiliary control test platform, and collects relevant parameters in real time on the test platform. According to the characteristics of the collected data, a method of segmenting driving behavior data based on lateral displacement is proposed, and the collected data samples are divided into left lane changing, right lane changing and lane keeping stages. The significance of the parameters acquired in real time is analyed, and the driving behavior is identified by using five parameters closely related to lateral motion as observation parameters. The results show that the recognition rates of lane keeping, left lane changing and right lane changing behavior are respectively 94.2%, 93% and 84.4%. This research has a significant role in improving the assistive effect of the lane keeping assist system and reducing the false alarm rate.
Key words: driving behavior; conditional random field; driving simulator; observation parameters; real-time system