
多功能护理床翻折机构设计与运动优化
2021-04-04 06:49赵海鸣舒辉波万奇龙
制造业自动化 2021年3期
赵海鸣 ,舒辉波 ,万奇龙 ,李 杰
(1.中南大学 机电工程学院,长沙 410083;2.中南大学 高性能复杂制造国家重点实验室,长沙 410083)
0 引言
随着人民生活水平的不断提高,人口寿命正不断延长,老龄化已成为全球范围的社会问题[1,2]。老年人由于身体机能的衰退,肌体活性不断减退;相较于普通人,老年人的卧床时间更长,由于行动不便,经常会长时间保持同一位姿,使得身体局部组织长期受压,导致压疮发生[3];同时,由于肢体长期得不到运动,不仅会造成关节萎缩,甚至会引发其他疾病[4]。
护理床是一种常用的智能护理设备[5,6],能够辅助病人进行康复运动,促进血液循环,增强肌体活性。翻折机构作为护理床的重要部件之一,在病人的康复护理中发挥着重要作用,能够提供病人生活自理所需的各种位姿;通过位姿的调整,可避免身体局部组织长期受压,防止压疮的产生[7]。
姜生元等研制了一种多功能康复床,该床具有抬背、轮椅转换、辅助排便等功能[8];张建国[9]等基于人体工学原理设计了护理床的上升机构和抬腿机构,并对其进行了运动分析;秦帅华[10]等设计了一种八杆单自由度起背机构,建立了相应的运动学模型,通过MATLAB对机构进行了优化设计;赵礼刚等[11]对抬背机构设计变量进行了研究,分析了各变量对背板角加速度的影响程度,并对关键变量进行了优化。
以上研究虽然实现了护理床的功能多样化,但未能完全解决卧床病人的护理难题,实用性还有待提高;对机构运动学的研究主要集中于抬背机构,未能对康复护理的关键机构进行分析。
本文基于人体工程学原理,设计了三类翻折机构,提升了多功能护理床的实用性和安全性;在此基础上,以改善护理床位姿变换过程中的平稳舒适性为目标,对机构进行优化设计。
1 翻折机构的结构建模
文中的翻折机构包括抬背机构、翻身机构、曲腿机构三大类,具有平躺、抬背、翻身、抬腿、曲腿、等功能,能够满足病人康复护理对位姿的要求。各机构的尺寸和安装位置是依照国标[12,13]进行设计的,能够更好的贴合人体尺寸。
1.1 抬背机构的结构模型
抬背机构能够实现仰卧、坐起等功能,主要由电动推杆、抬背杆、滚轮、抬背架、固定杆组成;抬背架包含center架、left架、right架三大部分,各部件间通过铰链相连。该机构具有一个自由度,动力源为电动推杆,能够保证确定的运动;工作时,电动推杆驱动抬背杆转动,通过滚轮与抬背架的高副接触带动抬背架绕固定杆转动,实现0°~75°的角度调节,机构模型如图1所示。
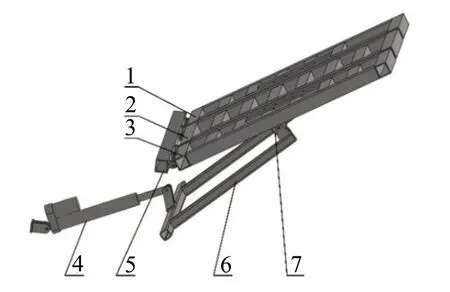
图1 抬背机构模型
1.2 翻身机构的结构模型
翻身机构能够实现卧床病人的左右侧翻,可避免身体局部长期受压,对压疮预防有较好效果。该机构由电动推杆、翻身铰座、支撑板、翻身架组成,翻身架包含center架、left架、right架三大部分,center架通过焊接在其上的支撑板与left架、right架间形成可分离式接触。当电动推杆伸长时,center架将带动left架顺时针转动,实现左翻身;当电动推杆收缩时,center架将带动right架逆时针转动,实现右翻身,翻身角度为0°~30°,机构模型如图2所示。

图2 翻身机构模型
1.3 曲腿机构的结构模型
曲腿机构由电动推杆、曲腿铰座、活动架、大腿架、小腿架组成,该机构具有一个自由度和一个动力源,能保证确定的运动。电动推杆通过曲腿铰座带动活动架绕固定铰座转动,活动架向上转动可实现抬腿功能,向下转动可实现曲腿和轮椅转换功能,能够辅助病人进行康复运动;活动架、大腿架与小腿架通过铰链相连接,形成一个平行四边形机构,可保证翻转过程中小腿架始终水平。机构抬腿角度为0°~35°,结构模型如图3所示。
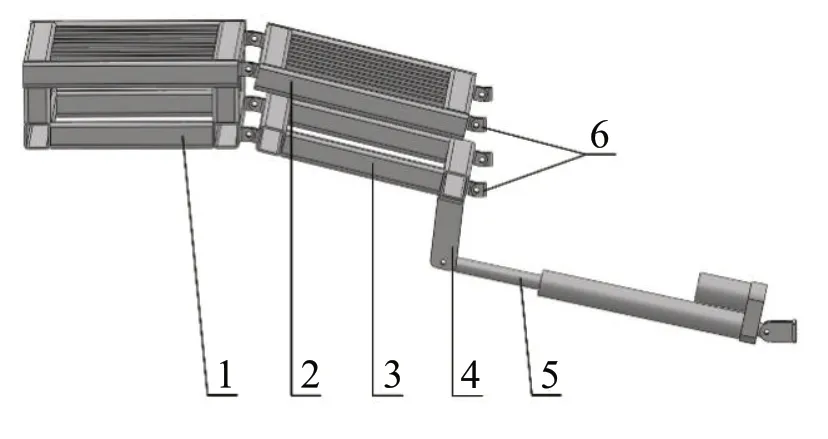
图3 曲腿机构模型
2 翻折机构运动学模型的建立
保证护理床位姿变换过程中的平稳能提升卧床病人的舒适性体验,抬背架、翻身架、大腿架是与病人身体直接接触的执行构件,其运动性能的优劣将直接影响病人的体验,需要对其运动参数进行研究。
2.1 抬背机构的运动学模型
抬背机构的运动简图如图4所示,研究的主要参数为抬背架角位移θ6,角速度ω6,角加速度α6。
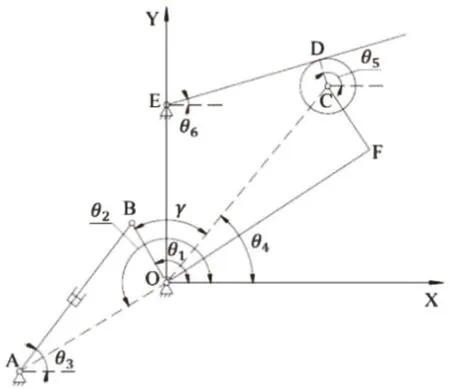
图4 抬背机构运动简图
∆AOB的封闭矢量方程为:

其复数矢量形式为:

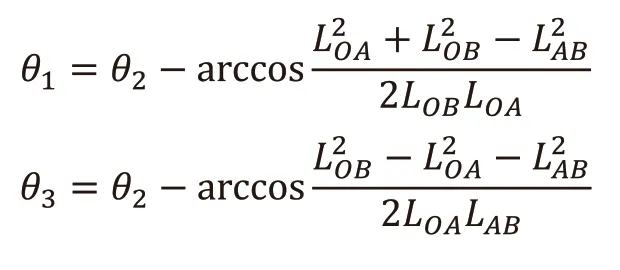
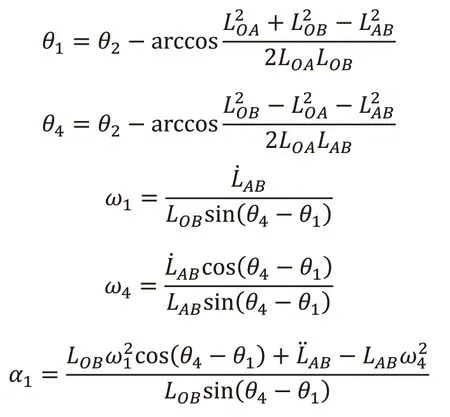
运用欧拉公式eiθ=cosθ+isinθ将式(1)的实部和虚部分离,解得:
将式(1)关于时间t求导,解得:

将式(1)关于时间t求二阶导,解得:

LOC与LOB均为抬背杆的组成单元,由几何关系可知:

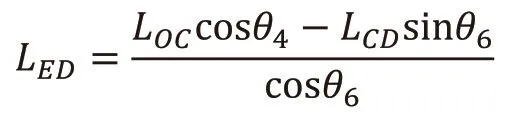
对四边形OCDE进行分析,其封闭矢量方程为:

由机构的运动几何关系可知:θ5=θ6+90°,则式(2)的复数矢量表达式为:

式(3)经欧拉公式展开求解可得:

式中M=-LOCcosθ4,N=LOCsinθ4-LOE,P=LCD。
将式(3)关于时间t求导,解得:
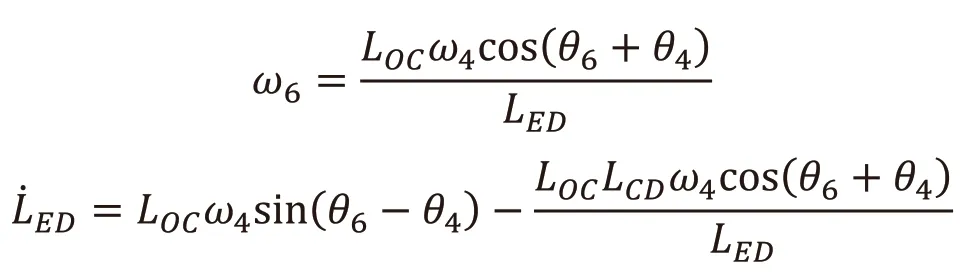
将式(3)关于时间t求二阶导,解得:

2.2 翻身机构的运动学模型
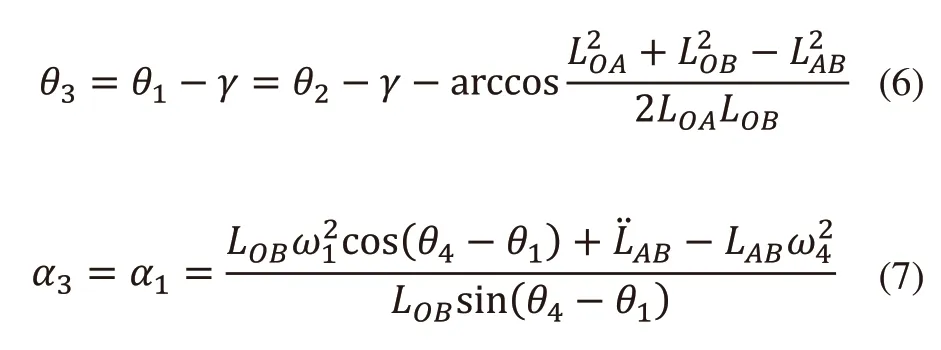
翻身机构的运动简图如图5所示,研究的主要参数为翻身架角位移θ3,角速度ω3,角加速度α3。
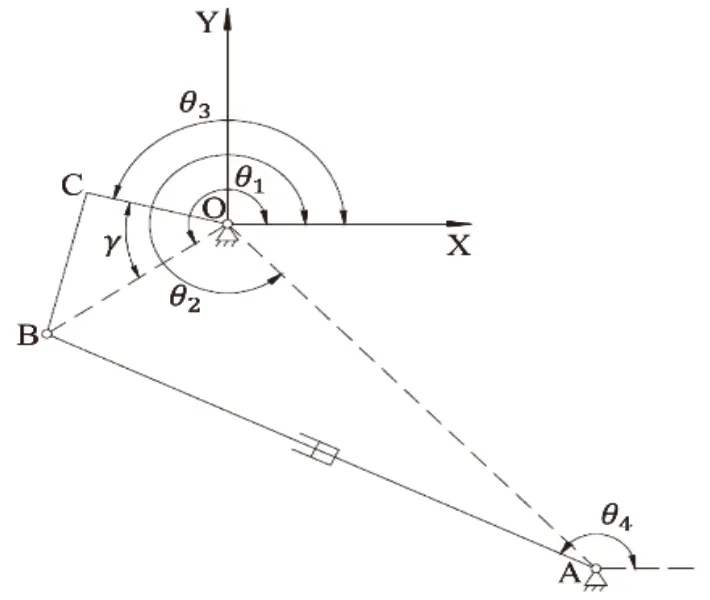
图5 翻身机构运动简图
同理,求解得:
LOC与LOB均为翻身架的组成单元,由几何关系可知:
2.3 曲腿机构的运动学模型
曲腿机构驱动原理与翻身机构类似,其运动简图如图6所示,研究的主要参数为活动架角位移θ3,角速度ω3,角加速度α3。
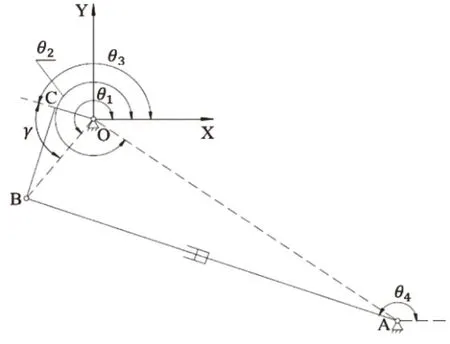
图6 曲腿机构运动简图
同理,求解得:
LOC与LOB均为活动架的组成单元,由几何关系可知:
3 翻折机构的运动优化
为了满足护理床的舒适性要求,翻折机构各执行构件的运动参数应变化平稳,避免发生突变;优化设计的目的:通过调整机构的结构尺寸,降低执行构件的角加速度,使其运动更加平稳。
3.1 抬背机构的运动优化
参考护理床设计标准,综合考虑护理床的空间布局、抬背架翻转角度以及推杆的行程,初步确定各点坐标为:O(0,0),A(-405,-100),B(-15,65),C(450,195),E(0,220),F(465,145)。
以各坐标点为设计点,通过ADAMS软件建立抬背机构模型并设定好零件间的连接关系;对抬背机构进行运动仿真,得到角加速度随转角变化的曲线,如图7所示。
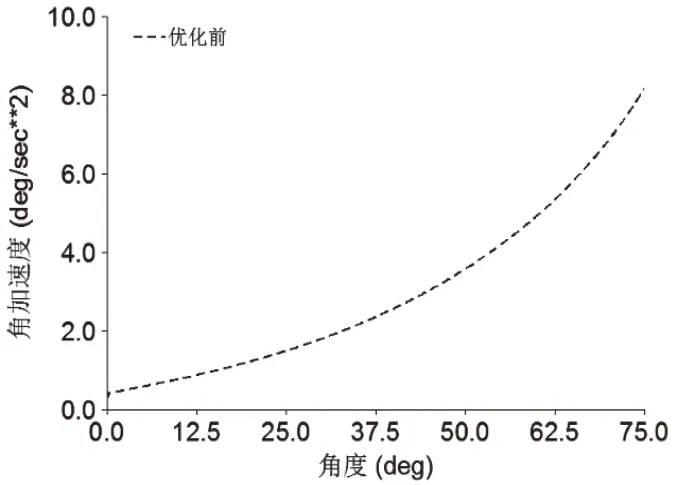
图7 抬背架角加速度曲线
由图7可知,抬背架角加速度随转角增大而持续增大,整个曲线较陡峭,终点位置的角加速度相较于起始位置增大了近17倍,机构的运动平稳性较差。
根据护理床的空间布局以及高度方向的尺寸限制,可以确定O点、E点横纵坐标以及A点、C点纵坐标,为了提升抬背机构的运动性能,可对其他设计点坐标进行优化。
以Ax、Bx、By、Cx为设计变量(下标x代表横坐标,y代表纵坐标),其取值范围如表1所示。对设计变量进行灵敏度分析,得到各变量对抬背架角加速度的影响度曲线如图8所示。从图可知,变量Cx对抬背架最大角加速度影响非常显著,当Cx增大时,最大角加速度先减小后增大,Bx、By对最大角加速度影响较大,Ax对最大角加速度影响微弱。

表1 设计变量的取值范围/mm

图8 抬背架角加速度影响度曲线
为了提升优化的效率,根据灵敏度分析的结果,选取Bx、By、Cx为优化变量,变量矩阵X=[X1,X2,X3]=[Bx,By,Cx]
抬背机构各构件长度为:
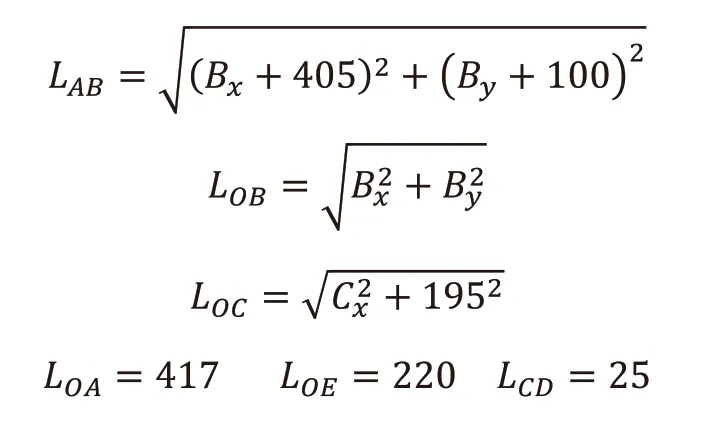
推杆伸缩长度应在行程以内,抬背架的转角为0°~75°,由式(4)可知:

式中M=-LOCcosθ4,N=LOCsinθ4-LOE,P=LCD。
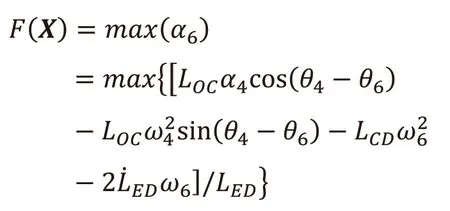
以抬背架最大角加速度为目标函数,由式(5)可知:
优化后变量的取值如表2所示,由表可知,当Bx、By、Cx分别为-4mm、73mm、450mm时,抬背架最大角加速度最小。优化前后抬背架角加速度曲线对比图如图9所示,由图可知,优化后抬背架角加速度曲线更加平缓,最大角加速度减小了近3倍,机构的运动平稳性得到了提升。

表2 优化后变量的取值/mm
3.2 翻身机构的运动优化
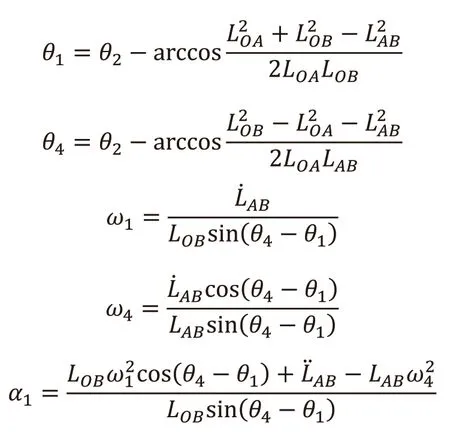
初步确定翻身机构各点坐标为:O(0,0),A(185,-220),B(-22,-60),C(-22,0),根据护理床的空间布局以及高度方向的尺寸约束,可以确定O点的横纵坐标以及A点的纵坐标。选取Ax、Bx、By为设计变量(下标x代表横坐标,y代表纵坐标),变量的取值范围如表3所示。

图9 优化前后抬背架角加速度曲线
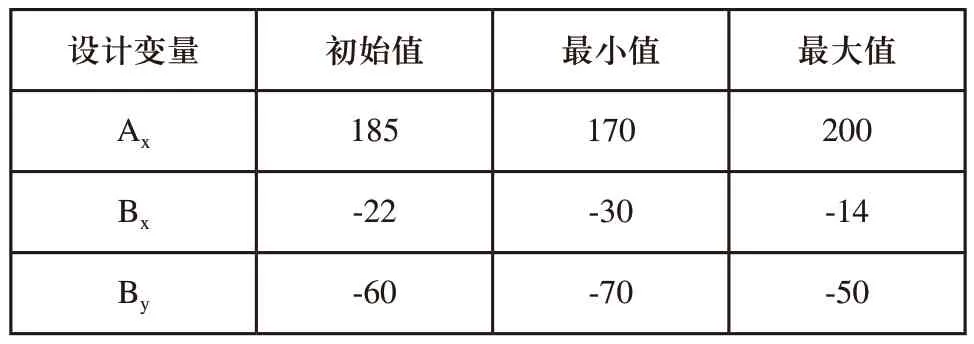
表3 设计变量的取值范围/mm
以Ax、Bx、By为优化变量,变量矩阵X=[X1,X2,X3]=[Ax,Bx,By]。
翻身机构各构件长度为:
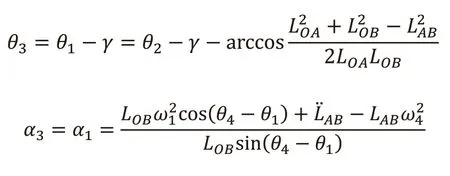
推杆伸缩长度应在行程以内,翻身架的转角为0°~30°,由式(6)可知:
以翻身架最大角加速度为目标函数,由式(7)可知:
优化后变量的取值如表4所示,优化前后翻身架角加速度曲线对比图如图10所示。

表4 优化后变量的取值/mm
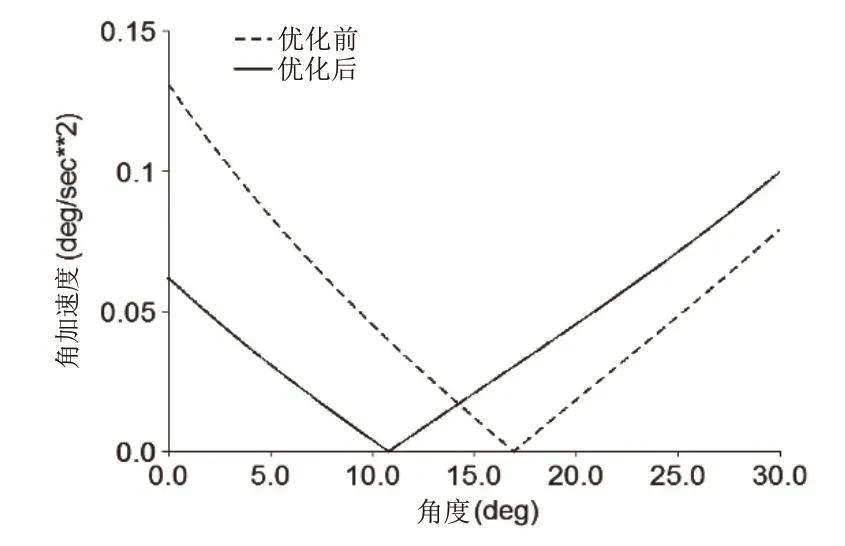
图10 优化前后翻身架角加速度曲线
3.3 曲腿机构的运动优化
初步确定曲腿机构各点的坐标为:O(0,0),A(445,-220),B(-35,-95),C(-35,0),根据护理床的空间布局以及高度方向的尺寸约束,可确定O点的横纵坐标以及A点的纵坐标。选取Ax、Bx、By为设计变量(下标x代表横坐标,y代表纵坐标),变量的取值范围如表5所示。

表5 设计变量的取值范围/mm
以Ax、Bx、By为优化变量,变量矩阵X=[X1,X2,X3]=[Ax,Bx,By]。
曲腿机构各构件长度为:
推杆伸缩长度应在行程以内,曲腿机构的抬腿角度为0°~35°,由式(8)可知:
以活动架最大角加速度为目标函数,由式(9)可知:
优化后变量的取值如表6所示,优化前后活动架角加速度曲线对比图如图11所示。

表6 优化后变量的取值/mm
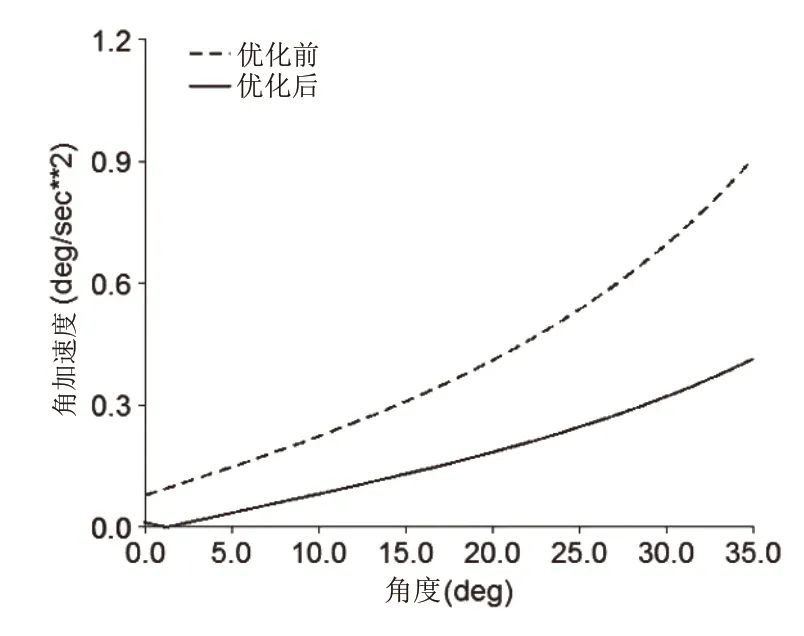
图11 优化前后活动架角加速度曲线
4 结语
为了更好解决卧床病人的康复运动和压疮预防这一护理难题,设计了3类翻折机构,所设计的机构原理简单、动力源精简、实用性强,能够提供康复护理所需的各种位姿。建立了翻折机构的运动学模型,借助ADAMS软件对其进行了优化设计,优化后翻折机构各执行构件的角加速度曲线更加平缓,最大角加速度显著降低,护理床位姿变换时的平稳舒适性得到了提升。
猜你喜欢
小学生学习指导(高年级)(2021年4期)2021-04-29
河北理科教学研究(2020年2期)2020-09-11
液压与气动(2020年4期)2020-04-10
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
中国核电(2017年1期)2017-05-17
新高考·高二数学(2014年7期)2014-09-18
科技致富向导(2013年23期)2014-01-09
