
基于BIM的铁路站房摄像头视场仿真与优化
2021-04-09 10:47钟青刘立海汪国良王波丽杨森
铁路技术创新 2021年1期
钟青,刘立海,汪国良,王波丽,杨森
(1.中铁第四勘察设计院集团有限公司,湖北 武汉 430063;2.陕西心像信息科技有限公司,陕西 西安 710061)
0 引言
铁路客运组织以及安全生产、防火、防盗、反恐、治安、调度指挥、事故防范等对客运站房视频监控系统提出了高要求。因此,只有完善的铁路车站视频监控系统才能对事件进行准确定位和快速响应[1-2],为铁路安全运营提供重要保障。
目前,随着铁路客运站房业务的不断提升,视频监控系统应用中存在迫切需要解决的问题。如摄像头拍摄角度太大或者太小,导致监控目标的清晰度不够;摄像头安装位置和数量不合理,导致监控空间存在盲区,这些问题严重影响视频监控系统在处理铁路客运站房突发异常事件中的有效应用。
采用传统二维施工图无法对摄像头监控覆盖区域、覆盖效果进行仿真。三维BIM技术具有可视化、协调性、模拟性、优化性等特点,因此有必要通过BIM技术中的三维建模应用和模拟仿真应用对摄像头监控覆盖区域、覆盖效果进行仿真。通过运算摄像头监控覆盖区域、有效监控区域等空间信息,实现监控空间可视化,减少监控盲区,提高监控清晰度。
先对单个摄像头的视场覆盖算法及仿真效果进行介绍;再对摄像头遇障碍物算法、摄像头盲区检测算法以及多个摄像头重叠覆盖区域检测算法进行介绍;然后以某铁路站房为例,对摄像头覆盖效果进行分析和优化。
1 摄像头视场仿真模型
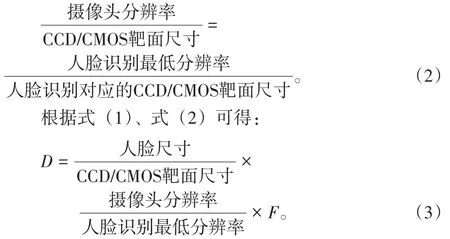
摄像头视场仿真模型可对铁路站房中摄像头监控覆盖区域进行准确仿真。站房各项管理要求被监控区域需要位于摄像头视野范围内;摄像头能够识别监控区域内的主要对象,如犯罪嫌疑人、可疑物品等;另外,还需识别主要对象的突出特征,如人脸特征、物品的主要特征等[3-7];为了实现这些目标,需要建立准确的摄像头视场仿真模型。
摄像头视场仿真模型见图1,其中P为摄像头坐标,P’为视场范围底面的交点,D为物距(以摄像头能够清晰进行人脸识别[8]的最大距离作为摄像头最大物距)。摄像头成像模型见图2,由于摄像头CCD/CMOS靶面尺寸与视场底面范围存在比例关系,可通过摄像头P的坐标得到CCD/CMOS靶面4个点的坐标,再通过比例变换得到视场范围底面4个点的坐标,P点与视场范围底面4个点形成的椎体即为摄像头视场范围。

图1 摄像头视场仿真模型

图2 摄像头成像模型
1.1 物距计算
摄像头传感器成像尺寸与实际成像尺寸存在比例关系:
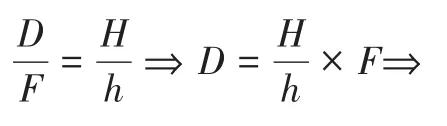

式中:D为物距,H为物体高度或宽度,h为CCD/CMOS靶面高度或宽度,F为摄像头焦距。
人脸识别最低分辨率与摄像头分辨率存在比例关系:
人脸尺寸和人脸识别最低分辨率分别取1个固定值,再根据摄像头靶面尺寸、摄像头分辨率、摄像头焦距范围,可以计算出摄像头至看清人脸的最大和最小距离,即摄像头的最大和最小物距。
1.2 三维空间中点变换
根据摄像头坐标P、方向单位向量V以及焦距F,可以计算出摄像头CCD/CMOS靶面的中心点坐标P0=P+F×(-V),然后根据摄像头CCD/CMOS靶面尺寸计算出摄像头CCD/CMOS靶面4个点的坐标。
根据摄像头成像模型可知,视场范围底面4个点是由摄像头CCD/CMOS靶面的4个点经过比例、旋转、平移形成的。而三维空间中某点的变换可以用点的齐次坐标与四阶三维变换矩阵相乘实现。利用缩放系数(D/f)、旋转角度、平移(D)构造变换矩阵,通过变换矩阵将CCD/CMOS靶面4个点的相对位置进行变换,得到新的4个点即为视场范围底面的4个点。根据摄像头P点及计算出的视场范围底面4个点生成视场范围。
1.3 视场范围生成
在Revit中建立摄像头相关族库,包括铁路站房中常用的枪型摄像头、球型摄像头以及半球型摄像头。在建立相关摄像头视场仿真模型时,为了实现摄像头的仿真覆盖效果,在摄像头中添加了一些属性,包括:摄像头坐标,摄像头水平、垂直角度,CCD/CMOS靶面尺寸,焦距,人脸尺寸,摄像头成像比例,摄像头分辨率,人脸识别最低分辨率等[9-10]。然后根据上述算法,生成带有视场范围的摄像头视场仿真模型。枪型摄像头、球型摄像头(带云台)视场仿真模型见图3、图4。摄像头覆盖区域可以根据需要进行展示或者隐藏,还可以根据需要调整摄像头水平、垂直旋转角度及焦距,对摄像头的覆盖区域进行优化。
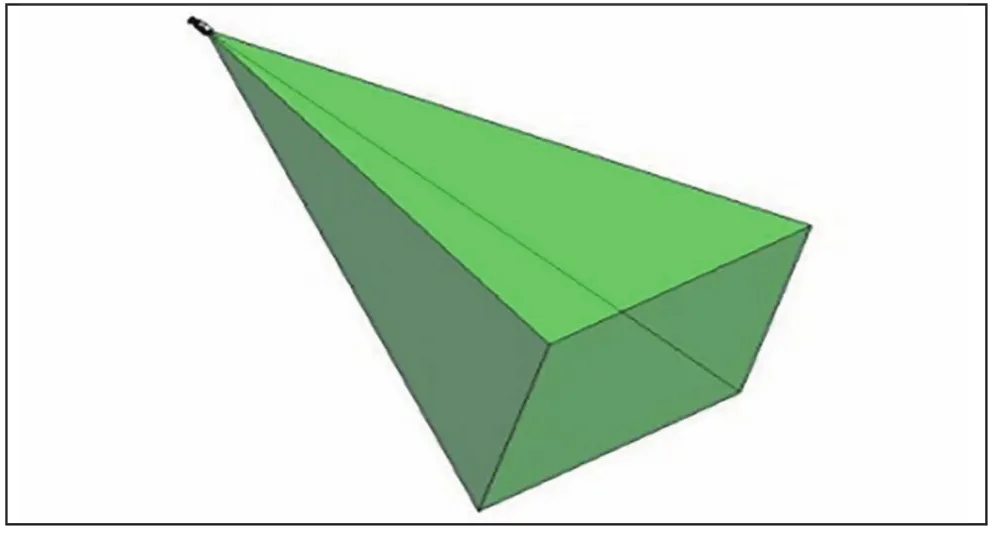
图3 枪型摄像头视场仿真模型
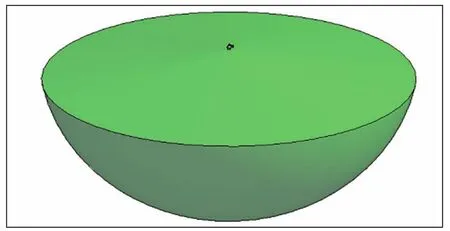
图4 球型摄像头(带云台)视场仿真模型
2 覆盖效果相关算法
2.1 视场遇障碍物算法
由于铁路站房内存在墙体、柱子、设备设施等物体,对于摄像头视场会产生一定范围的遮挡,因此需要考虑摄像头视场遇到障碍物时的覆盖效果。剪切算法示意见图5,当视场范围遇到遮挡物时,应该剪掉遮挡区域部分。实现这一算法需要经过识别遮挡物、获取遮挡区域、对遮挡区域进行剪切3个步骤。
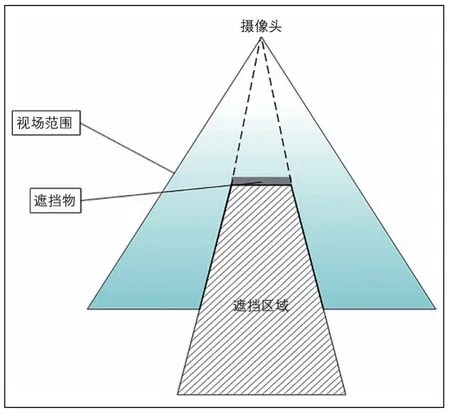
图5 剪切算法示意图
首先,采用相交过滤方法获取与摄像头视场范围相交的所有元素,这些相交的元素即为遮挡物;然后计算出摄像头的视场范围与遮挡物的交点坐标,交点坐标依次为P1、P2、P3、P4。记摄像头坐标为P,再以PP1、PP2、PP3、PP4为向量向外延伸D个距离得出坐标点P1’、P2’、P3’、P4’,以P1、P2、P3、P4围成的平面为顶面,以P1’、P2’、P3’、P4’围成的平面为底面,得到的区域即为遮挡区域。最后用摄像头视场范围剪掉遮挡区域,即可完成不含遮挡区域的摄像头视场范围。若遇到玻璃材质,则不会对覆盖区域进行剪切。
2.2 摄像头覆盖区域检测算法
在室内空间布放多个摄像头,2个或以上摄像头共同覆盖的区域为重叠覆盖区域,没有摄像头覆盖的区域为盲区。为明确摄像头覆盖区域、重叠覆盖区域以及盲区范围,采用不同颜色对不同区域进行区分。摄像头覆盖效果见图6,绿色区域为单个摄像头覆盖区域,深绿色区域为摄像头重叠覆盖区域,红色区域为摄像头覆盖区域以外的盲区。
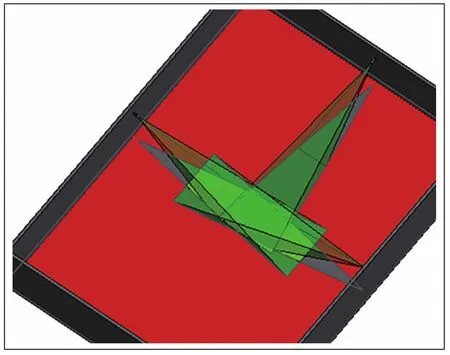
图6 摄像头覆盖效果图
然而通过视觉感官并不能得出覆盖效果是否良好的结论,还应该对覆盖效果进行定量分析。通过截取不同高度的平面(如地面、人的高度等),将盲区比例(平面内盲区面积与整个平面面积的比值)、重叠覆盖区域比例(平面内重叠覆盖区域面积与整个平面面积的比值)作为评估监控效果的参数,对监控效果进行评估。盲区范围越大,说明摄像头覆盖效果越差,需要增加摄像头个数或者调整摄像头的参数、位置、角度来增加摄像头覆盖区域;重叠覆盖区域比例越大,说明摄像头利用效率不高,可以通过减少摄像头数量或者调整摄像头位置、角度对摄像头的覆盖区域进行优化。
3 铁路站房摄像头覆盖效果分析及优化
以某铁路站房为例,对摄像头覆盖效果进行分析和优化。根据相关设计规范在铁路站房BIM模型内布放带有视场范围的摄像头,将多个摄像头的有效覆盖区域进行叠加,站房内摄像头的覆盖效果一目了然。
在未进行优化前,截取人的高度1.7 m,得到盲区比例为21.46%,重叠覆盖区域比例为34.61%。此时盲区比例和重叠覆盖区域比例较高,覆盖效果不佳,因此需要对摄像头的覆盖效果进行优化。通过增加摄像头数量,移动摄像头位置,改变摄像头的水平、垂直角度,调整摄像头的焦距来降低盲区、重叠覆盖区域比例,使场景内图像高清、覆盖效果良好。此过程需要不断重复,最终确定摄像头型号、数量、安装位置以及摆放位置。优化前后站房摄像头覆盖效果见图7。优化后截取人的高度1.7 m,盲区比例为12.15%,重叠覆盖区域比例为30.76%。由于很多房间内部未安装摄像头,所以不可能达到摄像头全覆盖状态。通过盲区、重叠覆盖区域比例优化前后数据对比可知,优化后摄像头覆盖效果良好。由效果图可知,候车厅、售票厅、出站厅等公共区域均达到了全覆盖。
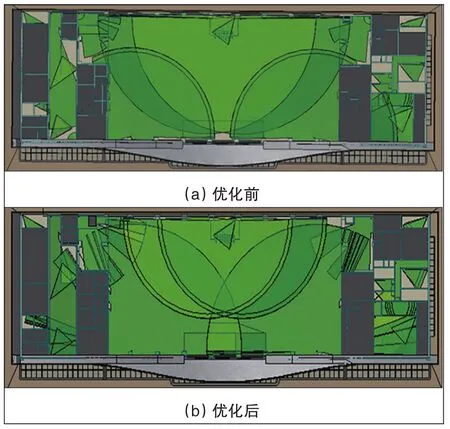
图7 站房摄像头覆盖效果图
4 结束语
以往只能根据相关设计规范以及设计经验在二维施工图上对摄像头进行布放、施工单位按图施工,在施工结束后才能检验监控效果,在调试过程或运营使用中经常发现由于摄像头安装位置和数量不合理使监控空间存在盲区或监控目标清晰度不够。
基于BIM的视频监控覆盖区域检测方法相对于二维施工图设计具有以下优势:在设计阶段可以看到铁路站房摄像头监控覆盖效果,并且可以通过BIM技术对覆盖区域及盲区进行检测,减少人工布放摄像头未能考虑的细节误差;在设计审查阶段,将视场优化的BIM模型对建设单位、咨询单位、审查单位以及运营维护单位进行展示,方便各单位提出修改意见;在施工阶段,施工单位利用优化后的摄像头布放方案进行施工,可以有效保证后期施工的顺利进行,避免拆改,减少返工,从而节省投资。由此可见,利用BIM技术进行铁路站房视场仿真与优化设计效果良好。
基于BIM的视场仿真技术除了可应用于铁路站房外,还可用于飞机场、港口、地铁站、汽车站、电影院等安全要求高的大型公共场所。采用BIM技术完善视频监控系统,可以提高这些场所的安全性。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
趣味(数学)(2022年4期)2022-07-02
云南画报(2021年10期)2021-11-24
科学技术创新(2021年25期)2021-09-11
运输经理世界(2021年9期)2021-04-09
空军工程大学学报(2020年1期)2020-06-12
小雪花·初中高分作文(2019年2期)2019-06-27
商周刊(2018年17期)2018-12-06
雷达学报(2017年1期)2017-05-17
为了孩子(3~7岁)(2016年5期)2016-05-14
