
基于移动执行器的无线传感器和执行器网络充电方法
2021-04-11 14:56苏州博睿测控设备有限公司韩会荣
电子世界 2021年6期
苏州博睿测控设备有限公司 韩会荣
本文设计了一种无线传感器与执行器网络的移动充电方法,根据节点的能量情况和当前位置正确选择下一个充电候选节点。本文算法在保证执行器节点不发生故障的前提下,尽量减少故障传感器节点的数量。仿真实验证明了本文算法的优势,有效降低了传感器节点的故障率,并实现延迟充电与成本的平衡。
1 介绍
无线传感器与执行器网络(WSANs)是无线传感器网络(WSNs)的衍生产品。除了传感器外,还有一些具有计算和通信能力的执行器节点加入到网络中。执行器节点被组织成一个内部网络,执行器可以相互合作和通信。此外,每个执行器覆盖一个特定的区域,负责该区域的事件。通常,传感器节点将事件传送到最近的执行器节点,执行器节点对事件进行初步处理,然后将处理后的数据通过内部网络发送给基站(BS)。传感器节点一般是不动的,但执行器可以随机移动。执行器节点的电池容量比传感器节点大得多,故执行器节点需要更多的充电时间才能变成满能量。
在WSANs中,执行器节点与传感器节点都有能量约束。虽然WSNs的能量补充已有深入研究,但WSNs的充电方法不能很好地应用于WSANs。其主要原因是:第一,执行器节点在整个网络中起着至关重要的作用。一旦执行器节点死亡,整个网络的性能将受到很大影响。第二,与传感器相比,执行器完全充电的时间要长得多,在这种情况下,我们要保证执行器节点不死,并保证没有及时充电而死亡的传感器节点数量降到最低。第三,执行器节点在网络中是可移动的。因此,应该考虑执行器的精确跟踪问题从而有效的对其进行充电。
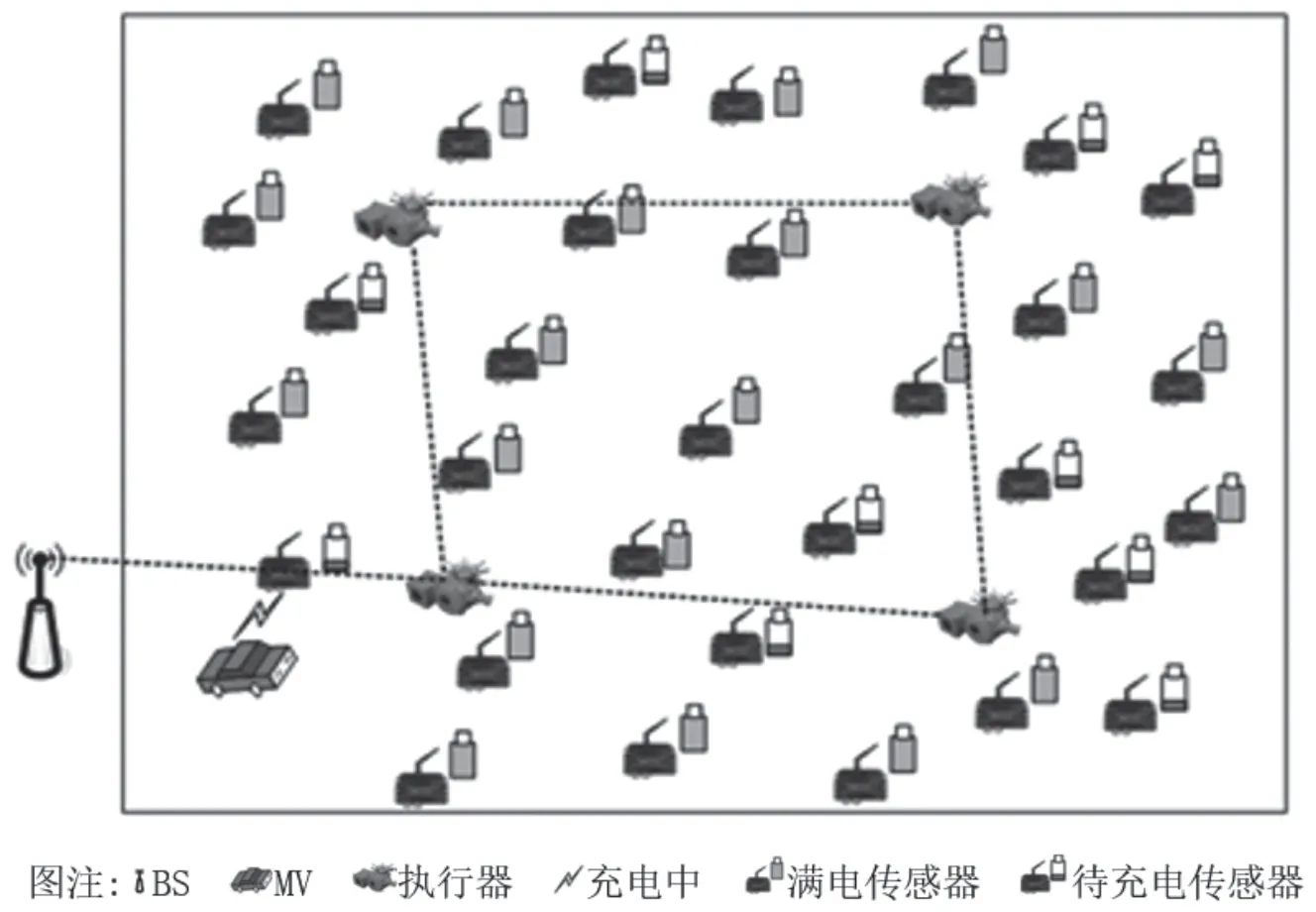
图1 WSANs网络模型
2 基于能耗估计的网络模型
如图1所示,网络由一个BS、一个MV、一组传感器节点和若干执行器节点组成。集合S={s1,s2,s3,...,sn}表示传感器节点集,集合A={a1,a2,a3,...,am}中的节点为执行器节点,其中m远小于n。整个网络被划分为若干个子网,每个子网中部署一个执行器节点,每个执行器节点根据随机航点移动模型在自己的区域内移动。传感器节点在整个网络中随机分布,不可移动。BS位于网络中心,其具有足够的能量和较强的通信能力,可以直接与MV通信。MV是一种强大的充电设备,它以恒定的速度V在网络中移动以便及时为每个节点充电。在这里,我们假设MV的能量足以为网络中的节点充电。
在这个网络中,每个节点都持续监测自己的能量情况。一旦它检测到能量小于阈值,它就会将充电信息及时发送给BS,BS及时转发给MV,MV负责选择下一个充电节点。
每个节点的能耗率和同一节点在不同时间的能耗是不同的。为了避免节点死亡,及时掌握能耗尤为重要。为了让BS掌握每个节点的当前能源状况,每个节点定期向BS传递包含消息。例如,来自节点i的消息格式可以表示为<IDi,REin,tin,task>,其中IDi代表节点i,REin代表其第n条记录的当前能量值,tin代表该消息的时间标记,task是要执行的任务信息。对于节点i,让Rin代表其当前能耗率的估计值,当n=1时:

代入根据指数加权平均法,得:

3 充电算法设计
3.1 算法流程
第一步:计算每个请求节点等待的最小值。当一个节点(如节点j)被收取为候选节点时,MV将计算其他剩余请求节点的最短等待时间。如果j是一个传感器节点,则节点i的最小等待时间命名为W(j,i),如式(3):

当j是一个执行器节点时,为了减少该执行器充电过程中的死节点数量,有w(j,i):

其中t(M V,j)和t(j,i)分别代表M V从M V当前位置到节点j的行驶时间和M V从节点j到节点i的行驶时间。、分别表示MV对传感器节点和执行器节点的充电时间,E和E'代表传感器节点和执行器节点的电池容量。α为0~1之间的参数,aE'代表执行器的充电上限。REj(t)表示节点i的最新剩余能量值,Rj为其能量消耗率,tj为节点j发送最后一次充电请求的时间,μ为MV的充电速率。
第二步:统计死节点数。当节点j作为候选节点时,在当前时间t内,确保节点i不死,要求,即当节点j即将被充电时,节点i不会死亡。当j要充电时,死掉的节点总数被命名为Nnum,i。
第三步:计算一个节点到另一个节点路程。由于传感器节点是静止的,因此可以很容易地计算出任意两个传感器之间的距离。但是对于执行器节点而言,为了计算传感器与执行器之间的路程,首先必须确定执行器的当前位置坐标。让(xg,yg)、(xp,yp)分别代表执行器节点的起始位置G和下一个目标位置P的坐标。C为执行器节点在时间t的当前位置,有:

其中,yc可以类比得出。tg代表执行器节点离开G的时间,之后可以计算出任意两个节点之间的距离。
第四步:计算充电度量值。现在我们计算每个节点的充电度量值,用于下一步充电节点的选择。对于节点i,度量值为的倒数。
其中distance(MV,i)表示MV与节点i之间的距离,β为权重系数。MV根据这个充电指标值选择下一个节点。通常情况下,选择度量值最大的节点作为候选节点。因为度量值越大,Nnum,i和distance(MV,i)的值越小。也就是说,造成死节点较少,且距离MV较近的节点更有可能首先被充电。
第五步:考虑应急执行器。在我们的算法中,为了保证应急执行器节点及时充电,每个执行器节点都不断更新自己的能量数值。一旦它检测到自己的剩余能量低于临界阈值δ,它就会及时发送紧急信息给BS,BS立即将紧急信息传送给MV,然后MV选择这个执行器作为下一个充电节点。如果有一个以上的执行器节点在紧急情况下,MV优先考虑最先发出紧急信息的执行机构。
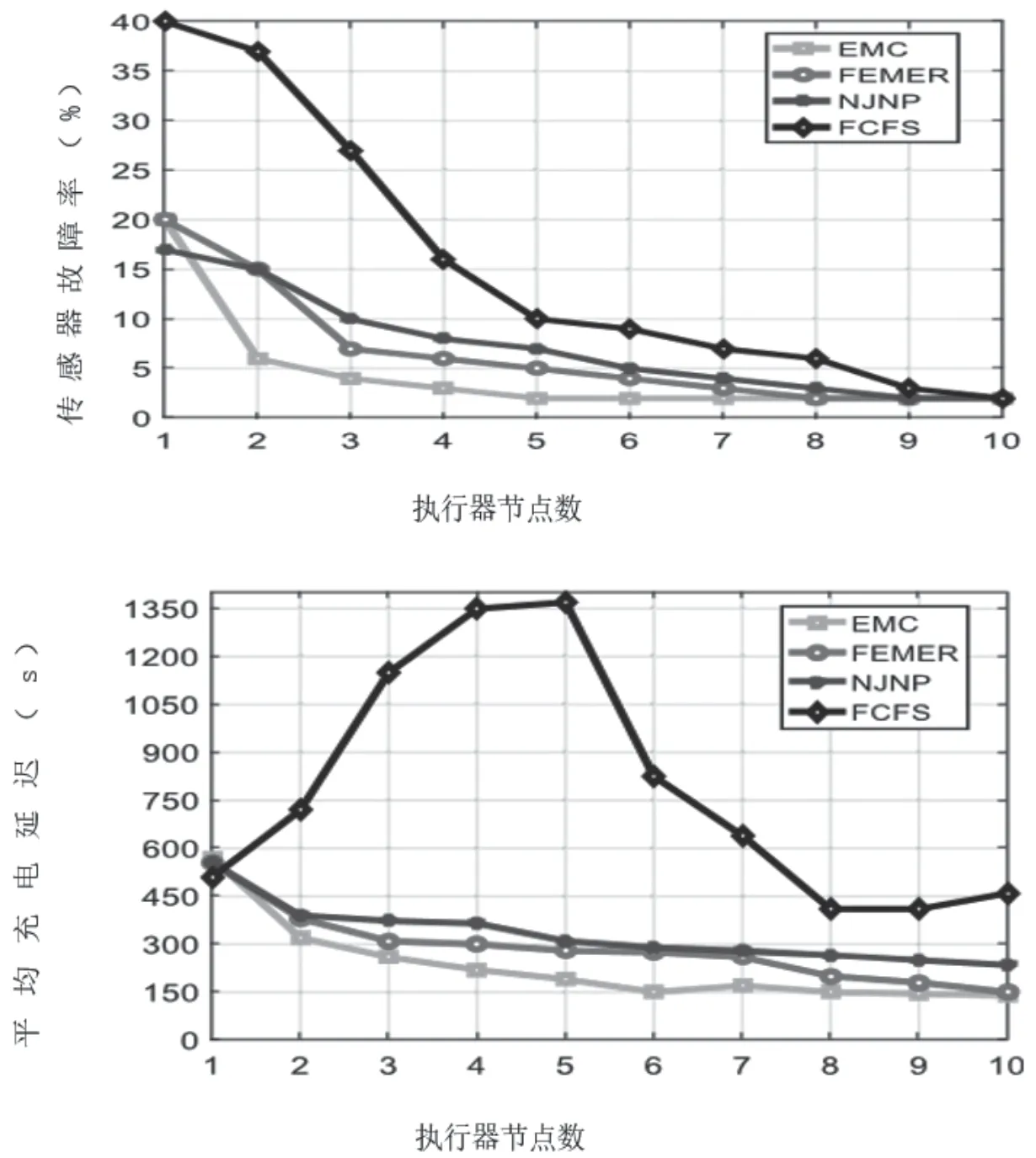
图2 算法的表现评价对比

3.2 执行器节点跟踪策略
由于执行器节点始终处于移动状态,因此需要预测执行器的充电位置,然后实行充电。假设选择执行器i作为下一个充电节点,MV首先会检查distance(MV,i)是否小于V与Ti,s的乘积。其中,Ti,s为执行器在源点S的停留时间,如果满足该公式,则说明MV到达S点时,执行器i暂时没有离开这里,所以MV选择对S点的执行器节点进行充电;如果不为真,则MV应直接移动到执行器i的下一个目的地点D前,当执行器i到达那里时,对其进行充电。一旦执行器i移动到远离MV的充电范围,要继续进行充电,MV要检查distance(MV,i)小于V与Ti,s的乘积是否成立。
式(6)中v'为执行机构的移动速度,Ti,D为在D点的停留时间,如果式(6)为真,MV应移动到D点,继续给执行机构i充电;如果不移动,MV必须停留在S点,因为当MV到达D点时,执行机构i不在那里。只有当MV获得下一个目的地的地理信息时,它将移动到那里来充电。当执行器i离开时,MV会继续寻找下一个执行器。根据公式(6),在充电位置对执行器i进行充电,直到其剩余的电量达到一定程度,能量达到上限。
4 仿真实验
以Java作为EMC功能测试的对象,与FCFS、NJNP和FEMER相比,从传感器故障率(%)、平均充电延迟(单位s)两个方面通过对比来对EMC的性能实行评定。在仿真中,我们将执行器节点的数量从一增加到十个。如图2所示,四种算法的传感器故障率随着执行器节点数量的增长而增长。EMC的表现优于FCFS、NJNP和FEMER策略,首先,这是因为我们设置了执行器的充电上限阈值,可以有效降低执行器充电时间过长而导致的传感器节点故障。其次,这是因为我们可以对能量贮存的情况进行估计,根据预测值合理选择下一个充电节点。四种方案的平均充电延时如图2。除了FCFS的充电延迟先增加后减少外,其他方案的充电延迟随充电节点数量的增加而增加。在EMC中,由于执行器节点有充电上限,可避免传感器死亡,所以它在四种算法中具有明显的优势。
结论:本文描述了一种新型的移动能量补充方法,根据预测各节点当前的能量状况及其与MV的距离进行充电节点选择。EMC有效减少了平均充电延迟,降低了传感器的故障率。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
小学科学(学生版)(2020年1期)2020-01-19
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
中华诗词(2017年4期)2017-11-10
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
