
无人机电力巡线装置控制系统设计
2021-04-11 14:56宁夏理工学院贾小龙黄博胜
电子世界 2021年6期
宁夏理工学院 贾小龙 张 岩 黄博胜 陈 炼
输电线路作为电力输电系统中最为重要部分,维持电力输电线路的稳定就成为了电力系统稳定运行的首要任务。每年国家电网在输电线路巡检上面都花费了大量的人力物力。为了解决这个问题,本文采用无人机巡线来代替人工完成电力线路的巡检。本文设计了四旋翼无人机的飞行控制器,为航行姿态测量和飞行控制的研究提供了基础。让无人机根据所采集到的线路进行巡线飞行,实现无人机的巡线功能。
输电线路是电力系统中重要的一部分,主要是由电力线路杆塔、高压输电线路、绝缘子等构成,我国的架空电力线路覆盖区域广,穿越地区的地形复杂,且长期暴露在这些复杂的环境中,故障时有发生,这就需要电力工人及时的进行定期检修和维护。
现阶段运用最为广泛的就是人工定期巡检。但是人工巡检存在高空作业难度太大、安全隐患较多、造成极大的资源的浪费,因此传统的人工巡检效率低下。
伴随着科技的发展,无人机的开发研究为电力线路巡检提供了新的发展方向,采用无人机搭载巡检设备对电力线路进行巡检在各个方面都有着传统的人工巡检无法与之媲美的优势。采用无人机巡检的方式可以降低巡检难度,很大程度的提高巡检的效率,可以降低人力成本。所以,对于利用无人机对电力线路进行巡检有着极其重要的意义。
1 国内外发展现状
我国对于无人机的研究和使用起步相对较晚,尤其是无人机的巡线技术是近几年才刚刚开始新起的一个全新领域。我国的国家电网实验室曾做过一些关于这方面的研究,也曾获得过一些进展。试验研究人员利用无人机搭载高清摄像头和云台以及热成像系统对电力线路进行巡检,可以很清楚的知道缺陷所在的位置。湖南电力科学研究院曾利用多旋翼无人机在电力线路被雨雪严重覆盖的情况下对电力线路进行巡线实验,并对技术缺陷进行了改进。
西班牙的马德里理工大学就计算机视觉技术应用于无人机的巡线导航上面,而且研究人员还基于GPS定位系统研发出了自动返航系统。日本的关西电力公司联合千叶大学共同研发出无人直升机关于电力线路的巡线系统,这套系统的独特特点就是它的故障自检测技术和三维图像监测技术,无人直升机上面搭载有线路自检测系统,能够检测出电力线路由于雷击、焊接裂缝、导线断裂等引起的线路故障。
2 硬件设计
本文设计的无人机巡线控制系统主要有电源模块、姿态传感器模块,循迹模块。无人机的飞控MCU是5V供电,而无人机的电源是12V,所以采用一个降压稳压模块,将无人机的电源降压稳压在5V然后利用RT9193稳压为3.3V电压接入飞控。
在设计中选用了加速度计和角加速度传感器,两种传感器进行无人机飞行姿态的测量。加速度计所采集到的数据可以和角加速度计采集到的数据进行互补。
对于加速度计和角加速度计,采用的是6轴运动处理组件MPU6050,其所具有的优势如下:MPU6050是一个组合型传感器,能节省大量的空间,不止是可以让飞控尽可能的小,还以减轻无人机的重量,而且还有扩展性,MPU6050与单片机的通讯是通过IC2引脚实现的,由于STM32F1的I2C引脚具有复用功能,所以气压计SPL06与单片机的通讯也是通过同一个I2C引脚实现的。
电路设计采用的是外设接口方式,除飞控的MCU(STM32F1)外,还有MPU6050(加速度计、陀螺仪)和SPL06(气压计)设计在飞控板上外,其他的比如超声波探头、OPENMV摄像头、光流模块、GPS等都是采用的外接的方式。无人机平台如图1所示。
OPENMV是基于MicroPython的嵌入式机器视觉模块,它的优势就在于开发环境友好,成本比较低,而且OPENMV出了用作图像处理之外还可以调用他的硬件资源。OPENMV使用的是STM32F7处理器,它的所有I/O输出引脚的电压都是3.3V同时兼容5V电压。

图1 无人机平台
3 无人机飞行控制原理
四轴无人机是一种欠驱动模型,可以分为十字形和X形,如图2所示。本文设计是以X形四旋翼无人机作为基础,因为虽然十字形的无人机在飞行姿态的控制上来说要简单的多,但是X形的无人机模型在飞行姿态的控制上来说它的联动性要比十字形的无人机要好。
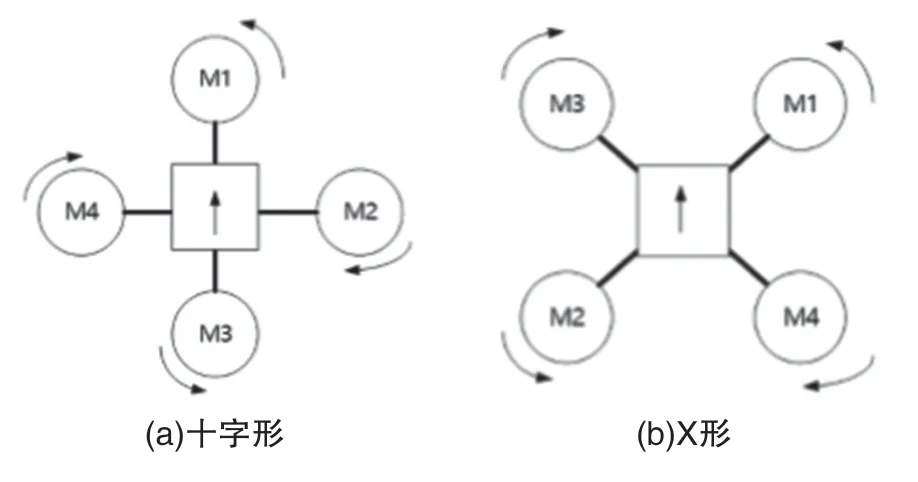
图2 无人机的两种控制模型
如图3(a)所示,无人机的上升运动和下降运动是由四个电机的转速共同控制的,若四个电机的转速同时增加时,电机的转动带动螺旋桨的旋转,而螺旋桨的转动会产生向上的升力,如果这一股升力大于无人机的重力,就会拽着无人机先上飞行,反之若无人机的升力小于无人机的重力,由于这个重力会使得无人机有一个向下的加速度,就会做下降运动。而当M1、M2、M3、M4转动所产生的升力和无人机的重力相等时,无人机就会悬停在空中。
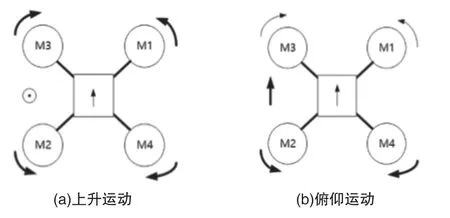
图3 升降运动、俯仰运动示意图
俯仰运动,如图3(b)所示。当M2、M4转速相同,M1、M3转速同比增加时,无人机前后两端的合力不再相等,无人机会产生一个俯仰角,桨叶产生的力也不在竖直朝下,而是会有一个向前的合力,由于这个俯仰角会使无人机产生会多出一个向前的力的分量,正是因为这个力的分量会推着无人机前进,机身就会做出俯仰运动。
4 巡线功能的实现
设计串级PID控制器,对无人机所在水平和竖直高度上的位置、速度以及加速度进行控制,控制器的结构如图4所示。

图4 无人机的串级PID控制器
相比较于普通的位置控制器,串级PID控制器同时对无人机的位置,速度,加速度进行闭环控制。根据加速度计数据得到的位置信息作为位置、速度、加速度PID控制的反馈值。以此构成三级闭环控制,能在很大程度上增强无人机的抗干扰能力。
四旋翼无人机在使用之前都要先解锁,起飞流程是在无人机解锁后,飞控根据控制信号通过控制调速器控制无人机的高度和速度。进入检测区域后可选择进入自动巡检模式。
4.1 巡线飞行
无人机在达到需要检测期望高度之后,会悬停在期望高度,然后进入自动巡线检测模式,无人机会自动根据电力线路方向进行自动巡检,若发现电力线路故障会进入悬停模式,而我们就会知道故障发生的位置,此时就只需要派专门的人针对性检修,能很大程度上节省人力和时间。具体的流程是当无人机进入航线飞行模式之后,飞控会读取当前的位置信息,然后通过气压计来确定当前的高度信息,也会通过GPS来获取当前的位置信息,然后分别通过卡尔曼滤波融合,通过融合后的信号来控制PID以此来改变无人机的飞行高度,和控制无人机水平位置的改变,最终实现无人机巡检。
4.2 无人机的自动降落
无人机在完成巡线动作后,需要返航,在本次设计中设计了一键返航,在遥控器上的第七通道,设计了一键返航的通道操作,当遥控器拨到自动降落的挡位是,无人机会获取无人机所处的位置,气压计会获取所处高度的气压状态与初始的气压状态进行比较,若与初始状态不一样时飞控就会进行PID整定以此来控制无人机的高度状态,然后通过GPS获得位置信息,若没有达到期望的水平位置,飞控就会进行PID整定,控制无人机的水平位置,最后在进行PID高度整定,最终实现降落操作。
总结:本文中基于四旋翼无人机的电力线路巡检设计,主要是针对于我国主要是要靠人力巡检的现状,目的是节省人工电力线路巡检的时间和成本,同时也为了提高巡检工人的安全,通过无人机和图像处理替代人工巡检。本文完成了无人机巡线装置模块的选择、控制电路的设计,经过飞行测试,达到了无人机的定高起飞,光流悬停,以及巡线飞行。
本文对无人机自主巡线做了研究,并通过自己设计的软硬件实现了上述的预定功能,但是在想要运用在实际的电力线路巡检上面,还存在着许多可以优化的地方:比如抗电磁干扰设计和绝缘设计。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06
中国电业与能源(2021年4期)2021-05-22
广西电业(2020年11期)2020-03-23
民用飞机设计与研究(2019年2期)2019-08-05
测控技术(2018年8期)2018-11-25
无人机(2018年1期)2018-07-05
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
