一种主动寻星式的天文姿态测量方法
2021-04-19 06:40张兴凡张光俊
宇航计测技术 2021年6期
张兴凡 张光俊
(中国人民解放军92941 部队,葫芦岛12500)
1 引言
近年来,随着舰船导航装备姿态精度不断提高,海上动态条件下的舰船姿态试验测量需求也要相应提高。高精度、高动态性能成为舰船导航装备试验测量手段重点的研究和发展方向。由于天文导航可以通过星敏感器测量恒星直接获得高精度的姿态信息,具有自主性强、屏蔽性好、可靠性高、设备简单等多重优点,因而在舰船导航装备试验中作为高精度姿态测量重要手段越来越得到重视和应用。
基于双轴伺服的天文姿态测量设备通过采用双参考矢量法,即天文测量设备包含两套独立的双轴伺服,各自发生角度分别对一个恒星进行跟踪观测,来解算确定舰船运动的姿态。该方法能够以高更新率获取姿态信息,是当前受到研究和应用比较多的一种方式。然而,由于大气扰动和蒙气差的存在,单个天体目标在一段时间内将产生固定的系统误差,该误差既难以补偿,亦无法通过多帧观察进行抑制,使得实际的测量精度受到一定程度的影响。
本文基于双轴伺服的天文姿态测量设备,提供了一种主动寻星式的天文姿态测量方法,通过提供的粗略姿态、时间及位置信息生成寻星策略,依据寻星策略进行巡天观测,结合天文观测信息与星表信息测得载体三轴姿态。该方法用巡天方式代替跟踪凝视方式,增加观测天文目标数量,显著抑制了系统误差,也消除了地动引起的观测误差,从而大大提高了舰船动态条件下的天文姿态测量精度。
2 测量原理
天文姿态测量设备采用主动寻星加伺服跟踪式天文姿态测量方法,主要技术包括核验信息处理、寻星策略生成、巡天观测控制和姿态解算算法四部分,实现流程如图1所示。
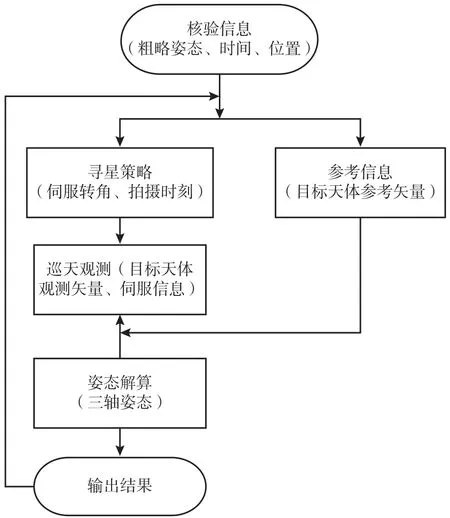
图1 主动寻星式天文姿态测量方法的实现流程Fig.1 Implementation process of active star seeking astronomical attitude measurement method
2.1 核验信息处理
为满足全天时观测的要求,基于双轴伺服的天文姿态测量设备的光电探测部视场较小,无法进行星图识别。因此,需要核验信息辅助其进行观测,核验信息包括粗略姿态、时间以及位置信息。若在本次测量前已有前序姿态测量结果,则前序姿态解算结果可以取代粗略姿态进行后续的计算。

时间信息可由授时模块(如卫星导航模块)提供,时间系统使用世界协调时(UTC),一般要求授时精度不劣于10ms。授时完成后,测量设备受时模块以此开始计时。授时时刻被记录,以作为寻星策略时刻安排的参考点。
位置信息指观测点的地理经纬度,可由卫星导航模块提供。一般要求定位精度不低于±50m。
2.2 寻星策略生成
寻星策略生成涉及三个方面:时间系统、天体方向矢量坐标系转换、自行补偿导航星表。
2.2.1 时间系统
时间系统对寻星策略至关重要,本方法涉及三个时间系统:
(1)协调世界时系统(UTC),该时间由授时设备提供。该系统主要用于测量装置守时,寻星策略和巡天观测中拍摄时刻的确定。
(2)儒略世纪系统(JD Century),该时间系统主要用于计算岁差、章动以及周年光行差。UTC 时间系统与其转换关系:
①记UTC 时间距离2000年1月1日的整天数为D,整时数为h,整分数为min,秒数为s(时区取0时区);

T
,则有:
(3)地方真恒星时(LAST)系统,该时间系统主要用于寻星策略中赤道参考系至时角参考系的转换。UTC 时间与其的转换关系:
①记当前UTC 时刻对应的格林尼治平恒星时为GMST
,则有:
GMST
是世界时UT1 当前日0h 对应的恒星时:
GAST
,则有:
Δφ
cosε/
15 是此刻地球的黄经章动。③记此时观测点处的当地真恒星时为LAST
,则有:
lon
是观测点的地理经度。2.2.2 天体方向矢量坐标系转换
天文星表中天体的指向信息是相对国际天球参考系ICRS 的,在地面观测中,姿态测量的参考系是观测点地平坐标系。则天体方向矢量坐标系转换如图2所示。
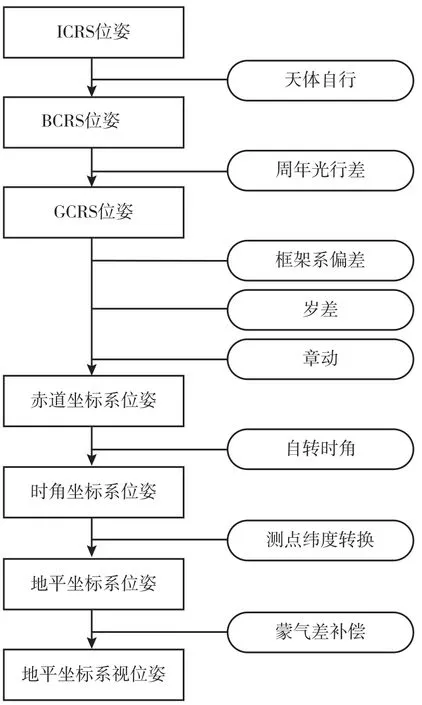
图2 天体方向矢量坐标系转换步骤Fig.2 Transformation steps of celestial direction vector coordinate system
转换步骤如下:
(1)经过自行补偿后,天体方向矢量的参考系从国际天球参考系ICRS 转换至太阳系质心天球参考系BCRS。为减少运算时间,该步骤已在导航星表生成时完成;
(2)经过周年光行差补偿后,天体方向矢量的参考系从BCRS 系转换至地球质心天球参考系GCRS;
(3)经过框架系偏差、岁差、章动补偿后,天体方向矢量的参考系从GCRS 系转换至赤道坐标系;



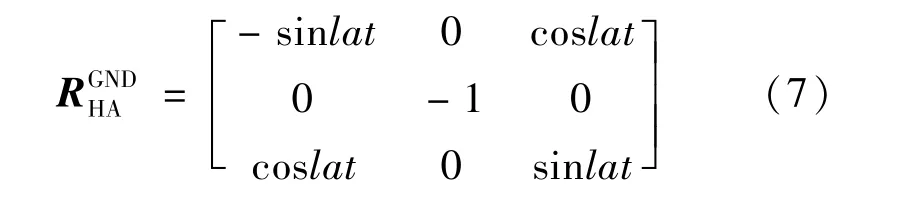
V
,则其对应的方位角θ
和天顶角θ
为:

ρ
:
ρ
——0℃标准大气压下的蒙气差。
A
——温度修正系数;T
——环境摄氏温度。
B
——大气压修正系数;P
——环境大气压,1hPa。2.2.3 自行补偿导航星表
星表生成步骤具体操作如下:
(1)选取与光电探测部探测谱段一致的天文星表作为导航星表的基本数据库。
(2)根据光电探测部可发现的极限星等,从基本输出库中筛除星等高于极限星等的暗天体、自行量值超过500mas/y 的天体、亮度变化超过0.5Mv的天体,得到星表历元下的导航星表。
(3)假定天文测量装置投入使用的历元段为T
1 至T
2,选取中心时刻(T
1 +T
2)/2 作为天体目标自行补偿的历元时刻,利用星表中自行运动信息,将星表历元下的导航星表补偿至中心时刻,得到自行补偿导航星表。(4)由于天体指向运动极为缓慢,因此自行补偿导航星表在姿态测量设备交付使用前已被固化,从而减小了寻星策略的运算量。
2.2.4 目标天体筛选步骤
(1)根据记录的授时时刻,进行寻星策略时间安排。从授时时刻开始,每间隔一定时长(一般10s以内)观测1 个天体。取第1 个天体和最后天体观测时刻的中间值作为目标天体筛选使用的时刻,记作T
。(2)采用转换矩阵,计算导航星表中全部天体在T
时刻在地平坐标系下的位置。为减小计算量,忽略蒙气差的影响。(3)截取所有在地平系下高度角为30°至60°的天体,并按照方位角在-180°~180°的区间内依次排序。
(4)上一步骤截取的天体数量有可能超过预定观测天体数量的上限,则依据图3所示筛除多余的天体:先计算相邻两个天体的方位角差值;再计算相邻两个方位角差值的和;寻找全部方位角差值累加和中的最小者,则其对应的3 个天体中的居中者应被剔除。
(5)对经过(3)、(4)两个步骤筛选的目标天体进行寻星策略信息和参考信息的解算。首先按照步骤(1)确定好的时间点为各个目标天体分配观测时刻,在奇数轮观测时按照“方位角递增观测时刻递增”的顺序分配,在偶数轮观测时按照“方位角递减观测时刻递增”的顺序分配。

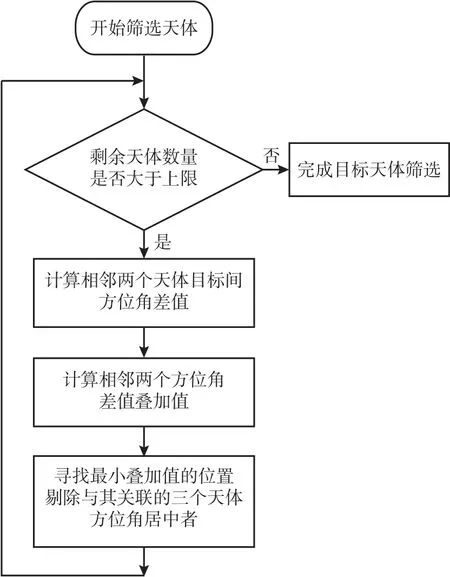
图3 目标天体筛选过程Fig.3 Screening process of target objects
2.3 巡天观测控制
巡天观测时,伺服依据方位角顺序依次对每一个目标天体进行观测。每完成一次观测,伺服即转向下一个待观测天体的指向并进入稳定控制阶段。若在观测时刻,伺服转位仍未到位或者未稳定,则本次的观测结果无效。在预定的观测时刻,光电探测部对天空进行照相,并从中提取天体目标的质心位置,进而计算其观测矢量。若图像中未能提取出任何天体目标,则本天体观测无效。若图像中出现多个天体,则按亮度排序记录最亮的3 个天体在光电探测部坐标系下的观测矢量以及观测时刻伺服码盘的示数。其中,光电探测部坐标系是由光电探测部的核心照相传感器定义的图像坐标系,坐标轴分别与光轴和传感器排布的两个轴向重合。
2.4 姿态解算算法
W
与参考矢量V
联立,通过QUEST 算法解算测量设备的三轴姿态信息。记录以输出姿态进行转换后,观测矢量与参考矢量的夹角误差。逐一将观测天体多于1 颗的目标天体观测矢量由W
替换成W
或W
。重新运行QUEST 算法,并记录观测矢量W
与参考矢量V
的夹角误差。若误差减小,则保留本次的天体选择并保留姿态解算结果。待全部运行结束后,输出保存的姿态解算结果。
3 试验验证
3.1 测量设备设计
基于双轴伺服的天文姿态测量设备主要由星体测量单元、信号处理单元和电源控制单元三部分构成,除此之外,还包括来自惯性测量设备和卫星导航设备的核验信息,结构组成如图4所示。

图4 基于双轴伺服的天文姿态测量设备结构组成Fig.4 Structure composition of astronomical attitude measurement equipment based on biaxial servo
依据本文前述的主动寻星式测量方法,对天文姿态测量设备软件进行优化设计。
3.2 试验总体方案
在海上实际条件下,舰船上难以找到稳定的姿态基准,因此在室外条件下采用高精度三轴转台模拟舰船摇摆环境,并提供航向和纵横摇真值,对主动寻星式天文姿态测量设备的姿态输出精度进行测试。室外测试系统构成如图5所示,测试方法如下:

图5 室外测试系统构成Fig.5 Composition of outdoor test system
(1)高精度三轴转台提供姿态、角速率激励,模拟舰船的航向与纵横摇改变,天文姿态测量设备与惯导设备安装固定在转台台面上;
(2)测试平台的时间同步使用卫导设备的PPS信号与RS422 的时间信息数据;
(3)天文姿态测量设备利用惯导设备和卫导设备提供的外部信息,实时观测星体并输出测姿信息数据;
(4)高精度三轴转台实时输出航向与纵横摇角真值信息,数据录取设备实时录取测试数据信息。
通过统计测试数据的误差结果评价天文姿态测量设备的精度。
3.3 试验结果
(1)白天观太阳试验
观测时长:1h;
天气情况:晴朗、多云;
温度:5℃;
湿度:30%RH;
气压:103.1kPa;
试验数据曲线如图6所示。

图6 白天观太阳三轴姿态数据曲线Fig.6 Daytime solar triaxial attitude data curve
试验结果(3σ
重复性):俯仰角θ
:7.8″;横滚角θ
:5.3″;方位角θ
:14.4″。(2)夜晚观星试验
观测时长:1h;
天气情况:晴朗、多云;
温度:0℃;
湿度:30%RH;
气压:103.1kPa;
试验数据曲线如图7所示。

图7 夜晚观星三轴姿态数据曲线Fig.7 Three-axis attitude data curve of night stargazing
试验结果(3σ
重复性):俯仰角θ
:2.9″;横滚角θ
:3.2″;方位角θ
:3.4″。4 结束语
本文所提供的主动寻星式天文姿态测量方法,通过核验信息处理、寻星策略生成、巡天观测以及姿态解算四个关键测量步骤,实现了对多目标单伺服主动巡天式天文姿态测量。核验信息处理过程中,通过引入前序姿态解算结果减小粗略姿态误差过大引起的测量失败的概率。寻星策略生成过程中,通过建立精确的时间系统转换以及天体目标参考系转换,实现了地平参考系下天体位置的准确预测;利用方位角分布特性进行的目标筛选,保证了最优的天体目标分布特征,提高了测量精度。巡天观测过程中的数据记录,保证了观测信息的有效性和精确度。姿态解算时针对多个观测目标的迭代求解极大地提高了算法对假目标的抵抗能力。验证结果表明,基于双轴伺服的天文姿态测量设备采用该方法进行航向和水平姿态测量,测量精度结果满足舰船姿态测量需求,对研制新型舰船天文导航测量系统具有重要参考意义和应用价值。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
小学阅读指南·低年级版(2021年5期)2021-05-28
百科探秘·航空航天(2019年4期)2019-06-11
科学24小时(2019年4期)2019-06-10
现代职业教育·中职中专(2018年10期)2018-05-14
课堂内外(小学版)(2017年3期)2017-04-15
广东第二课堂·小学(2017年2期)2017-02-20
新高考·高一物理(2016年3期)2016-05-18
新高考·高一物理(2016年1期)2016-03-05
考试·教研版(2013年11期)2013-09-26