
飞机强度试验舵面偏角测量方法的研究
2021-04-22 08:47柴东波郭晓冬杨东涛
工程与试验 2021年1期
柴东波,郭晓冬,杨东涛
(中国飞机强度研究所 全尺寸飞机结构静力/疲劳航空科技重点试验室,陕西 西安 710065)
1 引 言
飞机强度试验作为飞机研发过程中设计、制造、试验、试飞4大环节中不可缺少的第3棒[1],是保障型号安全首飞和持续试飞的先决条件。在飞机强度试验中,经常需要对升降舵、方向舵、副翼等活动舵面的偏角进行测量。因此,需要一种方便、准确、简单、可靠的测量方法对舵面的偏角进行测量。
由于飞机设计本身的原因,无法在舵面转轴上直接安装角位移传感器对舵面的偏角进行测量。传统机械夹具测量方法[2]、编码器方法、象限仪测量法[3]虽然操作简单,但受安装精度的影响,误差较大;激光雷达虽然测量精度高,但其操作复杂且成本高昂[4],很难满足试验现场快速、准确的测量要求。
随着倾角传感器的不断发展,其已广泛应用于角度测量的场合。严共鸣[5-7]等提出了利用角位移传感器进行测量的平尾偏角检测方法;程凌频[2]提出了一种基于倾角传感器的舵面偏转角度的测量方法;柯贤刚[4]等提出了基于SCA100T传感器的无线舵面偏角测量系统;肖砷宇[8]提出了一种新型的舵面偏角自动化测量系统。
以上学者的研究都是基于倾角传感器的舵面偏角测量方法。倾角传感器的安装分为水平安装和垂直安装两种,要求倾角传感器的安装面与被测物体面平行。当被测平面不为水平面和垂直面时,需要调整被测平面。因此,基于倾角传感器对舵面偏角的研究多为升降舵、副翼等水平舵面的研究,而对于方向舵偏角测量的研究比较少。并且倾角传感器受被测试验件动态情况和加速度的影响较大,在飞机结构强度试验中需要较长的稳定时间。
本文根据飞机舵面安装结构的特点,提出了一种基于位移测量的舵面偏角测量方法,有效地解决了在飞机强度试验中方向舵偏角难以测量的问题。
2 偏角测量的原理
飞机的舵面(升降舵、方向舵、副翼)安装于安定面(平尾、垂尾、机翼)的后梁,之间通过悬挂支臂和悬挂接头进行连接。如图1所示,悬挂支臂安装于安定面后梁,悬挂接头安装于舵面前梁,悬挂支臂与悬挂接头之间通过舵面转轴进行连接。悬挂支臂与悬挂接头的安装平面与舵面转轴互相垂直。

图1 某型飞机方向舵悬挂部位结构示意图
在悬挂接头选取合适位置作为位移测量点P,在悬挂支臂的两侧选取合适的位置作为位移传感器的安装点A、位移传感器的安装点B。
舵面偏角测量方法如图2所示。A、B为位移传感器的安装点,P为位移测量点的初始位置,O为舵面转动轴线。A、B、P、O在同一平面内,且平面与舵面转动轴向互相垂直。当舵面绕O点转动时,位移测量点P随之转动至P′,∠POP′即∠α为舵面的偏转角度。a为初始位移测量点P到位移传感器安装点B的距离,b为初始位移测量点P到位移传感器安装点A的距离,p为位移传感器安装点A到位移传感器安装点B之间的距离。位移测量点P绕舵面转动轴线O旋转,计旋转半径为r。当位移测量点由P转动至P′时,B、A两点位移传感器的测量值分别记为s1、s2。
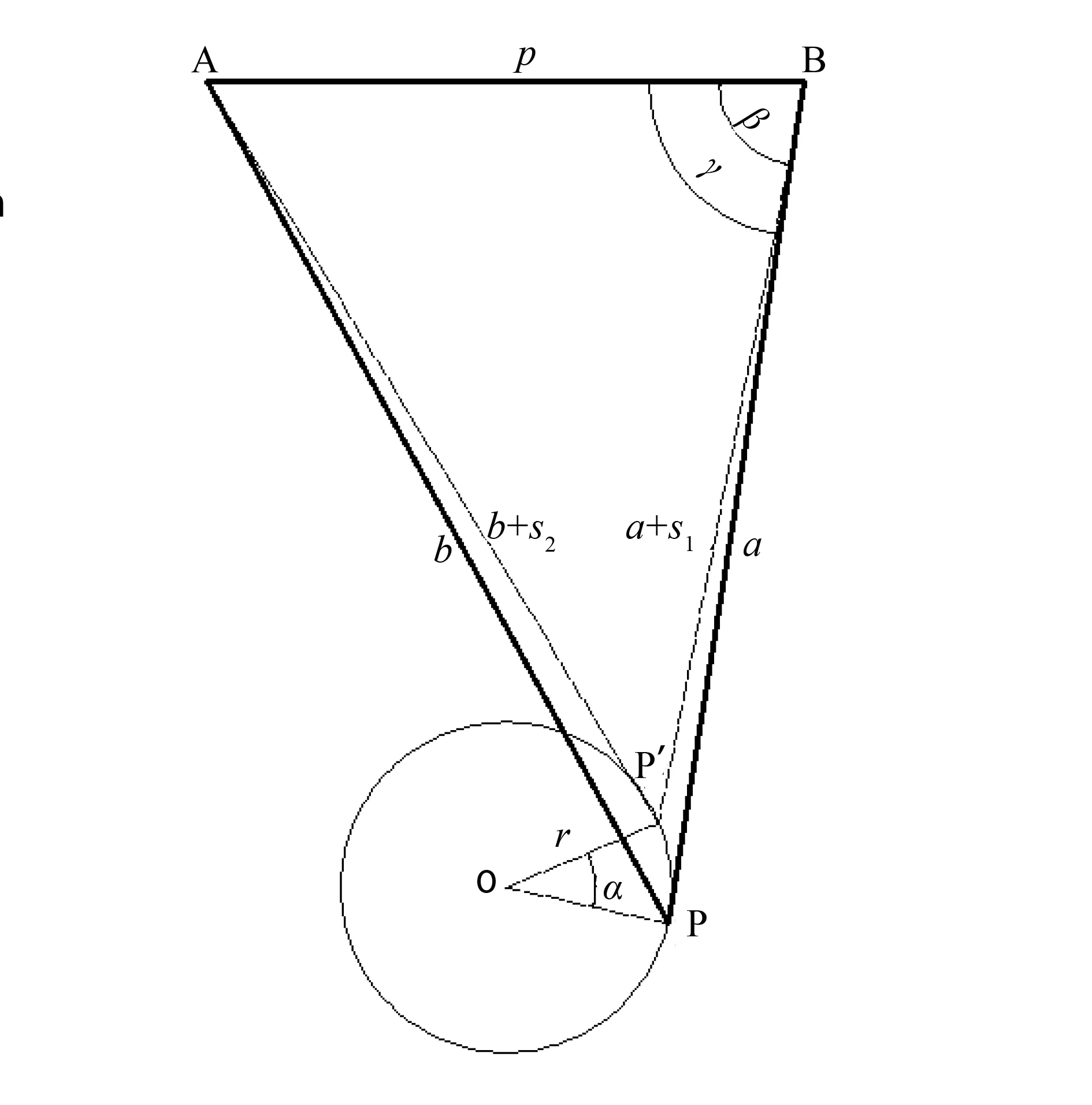
图2 舵面偏角测量简化示意图
由位移传感器安装点A、B和初始位移测量点P构成ΔABP,直线AB与直线BP之间的初始夹角γ可由余弦定理得出:
(1)
当位移测量点由P转动到P′时,位移传感器安装点A、B和位移测量点P′构成ΔABP′,此时直线AB与直线BP′之间的夹角为β,由余弦定理可以得出:
(2)
设定PP′的长度为l,在ΔBPP′中,由余弦定理可以得出:
l2=a2+(a+s1)2-2a(a+s1)cos(γ-β)
(3)
在ΔOPP′中,由余弦定理可以得出:
(4)
将式(1)-式(3)的计算结果代入式(4),即可得到舵面的偏转角度。
3 测量步骤
3.1 测量设计
一般情况下,飞机舵面与安定面之间通过多个悬挂支臂进行连接。根据测量要求与位移传感器选取情况,设计位移传感器的安装夹具,在CATIA数模中进行模拟装配,确定位移传感器的安装位置和位移测量点的位置。一般选取空间充裕、易于现场安装实施的位置,尽量避免在舵面旋转过程中,位移测量路径上可能存在试验件或其他物品遮挡的情况。
3.2 现场安装
根据设计进行现场位移传感器的安装。位移传感器安装完毕之后,需对下列尺寸进行实际测量:
(1)位移传感器安装点A、B之间的距离p;
(2)位移传感器安装点B与位移测量点P之间的距离a;
(3)位移传感器安装点A与位移测量点P之间的距离b;
(4)位移测量点P与舵面转动轴线O之间的距离r。
将位移传感器与数据采集系统连接,确保引线无短路、断路现象。
3.3 参数配置及公式编写
根据位移传感器的选取和现场安装、连接情况,在数据采集系统的对应通道配置位移参数。根据现场测量的实际尺寸和式(1)-式(4)编写实际计算公式,并利用数据采集系统的计算通道进行公式编辑。
3.4 试验测量
试验过程中,按照试验大纲要求,随试验加载程序逐级测量位移a、b的变化,实时计算舵面的偏转角度,对舵面偏转角度进行监控和分析,保证试验的顺利进行。
4 案例验证
某型飞机升降舵运动功能检查试验中,采用倾角传感器对基于位移测量的舵面偏角测量方法进行验证。位移传感器采用LXI-500Ⅲ型拉线式位移传感器(量程:500mm;基本误差:0.032%F·S;线性度:0.038%F·S;回程误差:0.021%F·S,重复性误差:0.015%F·S),倾角传感器采用HCA528T型电子倾角传感器(量程:±30°,绝对精度:0.01°),数据采集系统采用ST24数据采集系统(通道误差:0.03%F·S,线性度:0.03%F·S)。位移传感器、倾角传感器和数据采集系统均经过校准/检定合格。
倾角传感器粘贴于升降舵上蒙皮,安装面与升降舵弦平面平行,传感器轴线与升降舵旋转轴线平行。位移传感器通过专用安装夹具固定于升降舵悬挂支臂上,位移传感器通过铜丝与升降舵悬挂接头的位移测量点连接。
如图3所示,安装完毕后测量初始安装距离:位移传感器安装点A、B之间的距离p=404mm;位移传感器安装点B与位移测量点P之间的距离a=298mm;位移传感器安装点A与位移测量点P之间的距离b=423mm;位移测量点P与舵面转动轴线O之间的距离r=112mm。

图3 验证试验初始安装距离示意图
在试验过程中,按照试验大纲要求,通过ST24数据采集系统逐级获取B、A两点位移传感器的测量值s1、s2,利用计算通道同步获取舵面偏转角度α,具体数据如表1所示。

表1 试验对比数据
对基于位移测量的舵面偏角测量方法与利用倾角传感器直接测量得到的舵面偏转角度进行比较,可以看出,误差均小于5‰,满足飞机强度试验的要求。
5 结 论
本文提出的基于位移测量的舵面偏角测量方法,应用在某型飞机的升降舵功能检查试验中,通过与传统倾角传感器直接测量舵面偏角所得的试验数据进行对比,证明此方法真实可行。
基于位移测量的舵面偏角测量方法解决了传统采用倾角传感器无法测量方向舵偏转角度的难题,提高了试验偏角测量的相应速度,为型号研制提供了可靠的试验数据。目前,该技术已经在多个型号试验的舵面功能检查试验中得到了应用。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
兵器装备工程学报(2021年12期)2022-01-11
西安航空学院学报(2021年3期)2021-10-14
水力发电(2021年1期)2021-04-15
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
水电站机电技术(2019年1期)2019-01-22
商品与质量(2018年34期)2018-12-06
科学与财富(2018年1期)2018-03-03
智富时代(2018年11期)2018-01-15
