核主泵螺栓检测装置的环形轨道平台位姿调控并联机构综合
2021-04-30 08:24马超群杭鲁滨周路生张宝军
机械设计与制造 2021年4期
马超群,杭鲁滨,周路生,张宝军
(1.上海工程技术大学,上海201600;2.国核电站运行服务技术有限公司,上海200233)
1 引言
核主泵被喻为核电站的心脏,其运转可靠性对于核电生产具有重大意义。中空法兰螺栓作为其重要连接部件,须定期进行严格的超声检测[2]。离线检测属于目前主流的检测手段,其操作简单、装备设计简单可靠。但这种方式检测效率低,工作周期长,无法保证反应堆整体的完好性。文献[3]设计了一种主泵螺栓的超声检测装置,该装置可以实现单个螺栓的自动检测及远程控制,但仍然难以达到在线检测的要求,研制一种运行可靠、检测迅速的中空法兰螺栓在线检测装置势在必行。新型在线检测装置(如图1 所示)以圆环形轨道为基准平台,保证检测机构移动过程检测探头偏摆补偿,径向对准中空螺栓跟踪移动等动作,实现环绕主泵的螺栓超声检测功能。轨道平台相对主泵本体的六自由度位姿调控机构设计是保证主泵中空法兰螺栓在线精准超声检测的关键环节;目前国内外六自由度调整机构的装置研究大多集中在并联机构这一热点[4-6],已设计了多种六自由度的平台动作机构并实现成功运用。文献[8]提出的Stewart 平台机构现已广泛运用到包括飞行模拟器、并联机床、空间对接器、娱乐设施等行业,并出现了各种衍生机构。研究六自由度机构的新构型不仅具有重要的学术意义,还具有多样的应用前景和实用价值。
将轨道平台与主泵筒体间的六自由度相对位姿调控过程有序分解为几何意义的水平度和同心度调节过程;以其轨道平台位姿调控夹持为研究对象,构造对应的1T2R 水平度调整并联机构和1R2T 同心度调整并联机构,分析机构的装配条件、选取机构驱动副。设计出具有定位调节双重功能的解耦型六自由度轨道平台调节新机构。
2 中空法兰螺栓检测装置原理
团队所研制的主泵中空螺栓检测装置由检测组件、运行轨道、行走小车等部分组成,如图1 所示。检测时,首先需要安装环形轨道,检测杆作为末端执行器,实现自转、上升、避障动作。圆环轨道平台安装过程中的高精度定位调节对于提高检测效果至关重要,研制相应的环形轨道位姿调整及夹持机构是实现精准超声检测的核心技术。
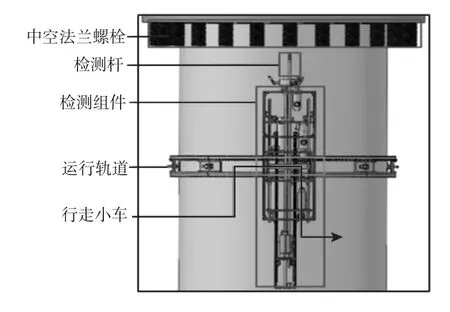
图1 中空法兰螺栓检测装置Fig.1 Hollow Flange Bolt Detecting Device
3 轨道形位公差测度及轨道平台位姿
整个检测组件与行走小车以轨道平台为基准进行操作;其姿态调整机构的构型设计是以探头与中空螺栓接触瞬间姿态为分析目标。引入形位测度思想,分解为具有几何意义的水平度和同轴度两个形位公差来表示;以此构造的解耦轨道平台位姿误差调整机构,分别对应水平度、同轴度指标。
3.1 检测装置末端误差分析
轨道平台形位测度的目标是确定机构设计期望输出;保证检测杆顺利进入中空法兰螺栓内孔完成螺栓检测。从检测杆末端状态来看,影响检测杆进入中空螺栓的形位姿态误差主要包括两种:杆件倾摆角度误差与杆件定位误差。
轨道俯仰倾摆所造成的检测杆与螺栓轴线夹角误差示意图,如图2 所示。夹角误差的存在使得检测探头轴线偏离中空螺栓,误差角过大将造成检测需要进行频繁的人工干预,甚至导致探头损伤等严重后果。综合考虑偏转角叠加效应、检测杆材料、检测标准、检测杆装配间隙等因素,定义标准检测参数:轨道平台极限偏差角度,即定义了轨道平面度的要求。

图2 杆件倾摆角度误差示意图Fig.2 Bar Tilting Angle Error Diagram
定位误差可看作中空螺栓孔几何尺度间隙偏差值及探头与中空螺栓尺寸极限偏差的叠加。如图3 所示,综合考虑确定轴线径向偏差极限裕量值A=4.5mm。即定义了轨道平台同轴度要求。
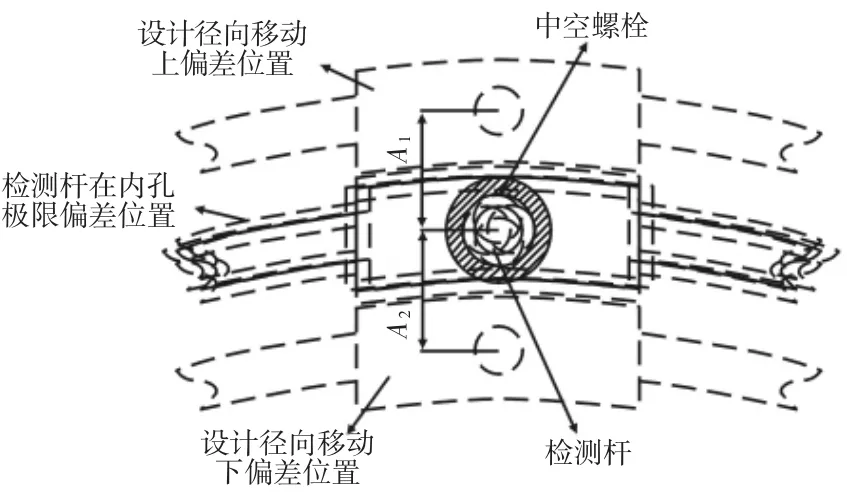
图3 杆件定位误差示意图Fig.3 Bar Positioning Error Diagram
调整轨道水平度、同轴度至关重要。通过环形轨道平台安装调控并联机构的调节,不仅确保了检测过程的顺利进行,而且对于提高装置的检测效果,及时发现核主泵螺栓安全隐患也具有极其重要的意义。
3.2 误差形位尺度与机构期望输出映射
根据上述分析:可将形位尺度误差分解为轨道平台水平度误差,以及轨道平台轴心与主泵筒体轴心间的同心度误差。轨道安装自由度包括三方向的移动和绕三个轴的转动,所设计的安装调节装置应当使全部六个自由度方向可调节。
如图4 所示,基于轨道平台形位测度及简化并联机构设计两方面考虑,期望以轨道平台x、y轴方向的移动和z轴方向的转动来构造一种平面并联调节机构(2T1R);以轨道平台绕x、y轴方向的转动和z轴方向的移动来构造一种空间并联调节机构(1T2R)。
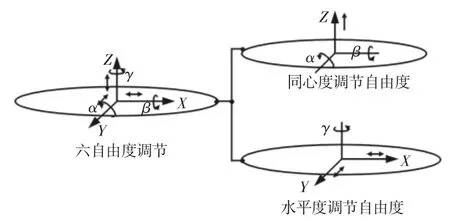
图4 轨道平台位姿期望输出解耦分析Fig.4 Decoupled Analysis of Orbital Platform Degrees of Freedom
两并联机构的动平台为同一圆环轨道平台,并联装置通过串联协同实现轨道平台六自由度高效有序调节。
4 调整并联机构综合
轨道平台位姿调整的并联机构综合分两部分进行,即首先对实现同心度调节三维平面两平移一转动(2T1R)机构进行选型综合,接着对两转动一平移(2R1T)水平度调节机构进行机构综合,以及机构解耦性分析。
4.1 两平移一转动平面并联机构构形综合
为实现操作空间的充分利用和提高机构可靠性,同心度调节机构设计为一种平面并联调节装置,实现轨道平面内x、y轴方向移动和绕z轴方向的转动调节(记作2T1R)。调节机构位于轨道平面内,可以看作是调节轨道中心线与主泵圆柱体中心线的相对位置。基于平面机构的拓扑理论,整个设计过程如下:
4.1.1 构造并联机构
考虑到支路调节的方便和对称性,优选支路组合方案[1]:

4.1.2 并联机构运动特征分析
同心度调节机构符合设计需求,其机构简图,如图5 所示。同心度调节机构自由度:F=3(n-1)-2PL-PH=3。
动平台有一个绕R轴线的独立转动元素,在垂直于R轴线的平面内,有两个独立位移元素。
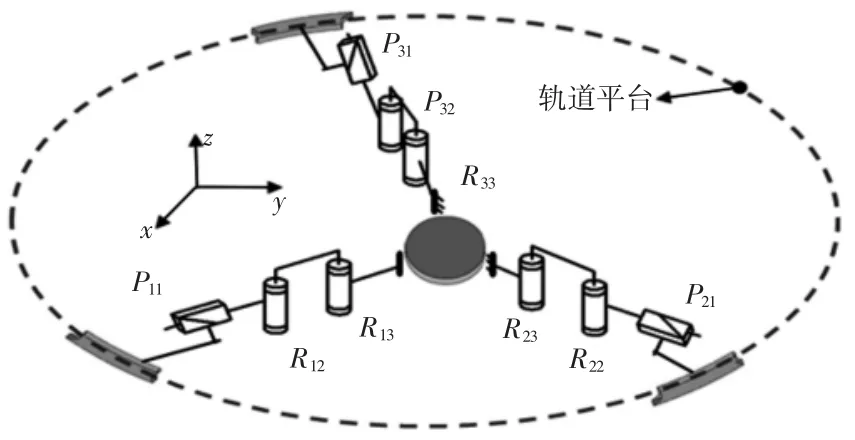
图5 同心度调节机构简图Fig.5 Concentricity Adjustment Mechanism
4.2 两转动一平移并联机构构型综合
两转动一平移(2R1T)并联机构的作用是调节轨道平台水平度与高度。实现轨道z轴方向移动调节和绕x、y轴方向的转动调节(记作2R1T)。调节机构为空间并联机构,结合机构拓扑结构设计理论与实际动作空间分析,整个机构拓扑设计过程如下:
4.2.1 构造并联机构支链
由分析可知,水平度调节机构为1T2R 并联机构,Mpa的表达式如下:
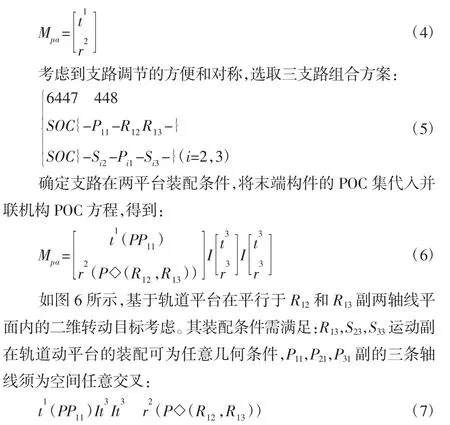
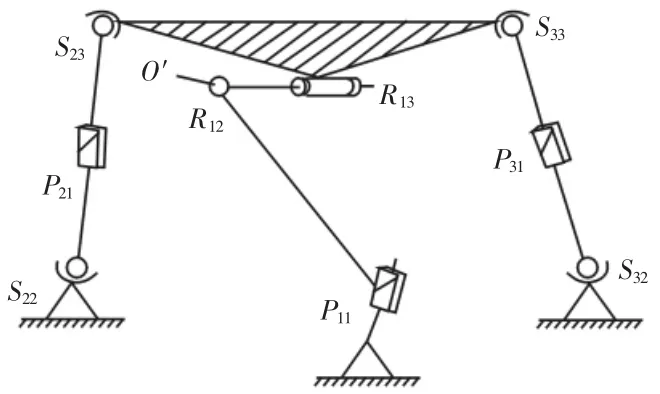
图6 水平度调整机构简图Fig.6 Level Adjustment Mechanism Diagram
4.2.2 机构自由度计算
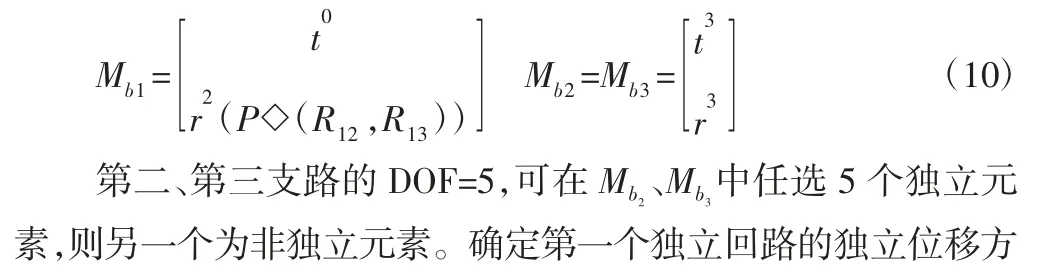
已知支路拓扑结构与两平台装配的几何条件,以此来确定机构自由度。首先确定第一个独立回路的独立位移方程数ξL1:

依据消极副判定准则和相关的计算过程[1],可判定P11副不是消极运动副。同样可证明该机构的所有运动副都不是消极运动副。
4.2.3 机构驱动副选取可行性分析
基于驱动副判定准则[1],刚化三个移动副P11,P12和P13,取R12与R13副的两轴线交点为基点O′,由串联机构POC 方程,其末端构件POC 集分别为:

如图6 所示:该机构基点O′位置,平台倾摆由P21、P31副的输入确定,平台绕R12、R13轴的俯仰运动由P11输入,该机构具有部分解耦性,有利于实际调节操控。
5 轨道平台并联机构解耦调整机构
由以上水平度、同心度机构综合,得出轨道平台调整组合结构,如图7 所示。主泵泵体看作并联机构的静平台,轨道平台看作并联机构动平台,同轴度和水平度调整机构可实现解耦顺序调整,一般先进行水平度调整,再进行同心度调整。
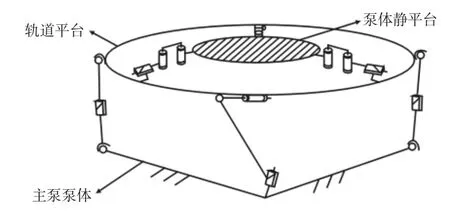
图7 环形轨道平台并联调整机构简图Fig.7 Schematic Diagram of Parallel Adjustment Mechanism of Circular Track Platform
为满足轨道调整装置水平度调节机构快速安装拆除的设计要求,在每条支链的两端设计快手夹具,如图8(a)所示。真空海绵吸具,如图8(b)所示。作为连接构件和定平台支点,以保证检测装置实现辐射环境下无干涉安全操作;同心度调节装置则抽象为螺纹副驱动的柔性同心度调节支路,结构如图8(c)所示。在实际操作中先进行水平度调节操作,三条支链主动驱动长度可通过运动学正逆解得到,调整后可使得轨道平台水平度达到工程预设精度标准,接着进行同心度调节固定操作,直至轨道同心调节达到工程预设精度标准。两并联装置的串联操作,保障了整个调节系统解耦性,使得操作简单、迅捷。所研制机构有待进一步调试,目前装备制造进展,如图9 实物图所示。
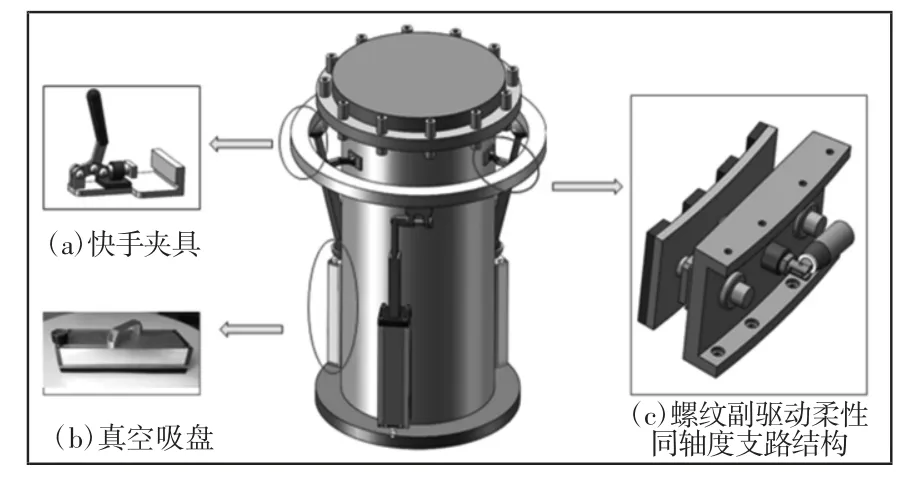
图8 环形轨道平台并联调整机构Fig.8 Circular Track Platform Parallel Adjustment Mechanism

图9 中空法兰螺栓检测设备实物图Fig.9 Hollow Flange Bolt Testing Equipment
6 结论
(1)提出基于轨道形位误差测度的轨道平台位姿调控方法,即将轨道平台六自由度姿态分解为水平度调节部分与同轴度调节部分,基于此期望需求分别综合对应并联机构。(2)基于方位特征集的拓扑机构设计理论,对水平度调节并联机构、同轴度调节机构进行构型综合,并验证设计构型的驱动副选择可行性,得到满足实际工程应用的新型机构。(3)基于轨道平台顺序安装调整操作机理,通过两并联机构串联耦合,完成轨道平台调整机构的总成构型设计,该轨道平台调整装置的设计方法具有实用价值和推广性。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年13期)2021-07-28
橡塑技术与装备(2021年7期)2021-04-22
凿岩机械气动工具(2017年3期)2017-11-22
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
石油化工建设(2015年4期)2015-12-01
新疆钢铁(2015年1期)2015-11-07