模糊及PID 控制在变转速液压动力源流量控制中的应用研究
2021-04-30 08:22谷立臣祁泽林李贾宝
机械设计与制造 2021年4期
谷立臣,祁泽林,李贾宝
(西安建筑科技大学机械电子技术研究所,陕西 西安 710055)
1 引言
液压传动具有传动平稳、启动时间短、容易控制等优点,同时传动介质具有较好的吸振能力,使系统更加容易实现过载保护,因此在许多工程领域获得了广泛的应用[1]。随着变转速液压技术不断发展,使用范围也越来越广。该液压系统通过改变变频器的电压,使电机转速发生改变,进而改变泵的输入转速,进一步调节泵的输出流量,最终可控制执行元件马达的转速,该系统具有响应快速、噪声低、功率大等优点[2]。采用普通PID 控制无法达到目标效果,而模糊控制无需考虑精确数学模型,系统鲁棒性更强,适用于更为复杂的系统。文献[3]主要研究的是永磁同步电动机系统中,结合模糊控制提高位置动态性能的应用。文献[4]运用模糊控制方法设计了一种基于车体加速度及其变化率的模糊控制器,分析比较了相同输入条件下模糊控制与被动悬挂控制在时间响应快速性和鲁棒性等方面的不同。因此,研究高效的控制方法和算法有很大的必要性和意义。
针对上述提到的液压源流量控制存在的问题,提出流量模糊控制方法。该方法以变频电机带动变量柱塞泵为动力源,以该动力源的流量差值及其变化率作为输入量输入模糊控制器,经处理后,得到电压值输入变频器改变电机转速,流量发生相应改变以达到控制系统流量目的。结合变转速液压动力源流量PID 控制以及模糊控制方法,开展对实验系统的控制策略开发及实验研究[1],得出部分结论,也为后续研究提供一定参考。
2 变转速液压动力系统
变转速液压动力系统主要由变频器、异步电机、变量泵、变量马达构成。其原理图,如图1 所示。主要由动力源、液压传动部分、加载部分组成[5]。其中:
(1)系统动力源为变频电机带动变量泵的形式,由异步电机1、变频器以及柱塞泵4 组成。该液压系统通过矢量控制产生相关信号,从而完成系统流量控制,进而控制系统转速。
(2)液压传动系统部分为柱塞泵4、补油泵5、换向冲洗阀10和变量马达11 构成的典型闭式液压回路。补油泵5 可通过补油单向阀7 向低压侧补油,以保证系统油路稳定,作用非常重要。换向冲洗阀可进行散热,比例溢流阀8 起限制系统超压的功能,当压力过大时,通过溢流来进行安全保护。转速转矩传感器3 可实时测定变量泵、马达端的转速和转矩。组合传感器9 可实时监测系统压力、流量、温度等信号。
(3)加载系统主要由齿轮泵12、比例溢流阀8、惯性轮、制动器等组成。改变惯性轮个数即可改变其重量,惯性负载也发生改变,齿轮泵12 与变量马达11 通过可变惯量盘组以及制动器装置刚性连接。截止阀14 对其所在的管路中的液压油起着切断和节流的重要作用。溢流阀13 在加载系统中通过限制系统超压来进行安全保护[6]。

图1 变转速液压动力系统原理图Fig.1 Schematic Diagram of Variable Speed Hydraulic Power System
3 变转速液压系统流量控制原理
跟据试验台的功能特点及工作原理,为了保证变转速液压系统执行机构的准确性和系统节能,需要对系统流量进行控制,进而对马达转速进行实时调节。下面将变转速机电液系统调速回路简化,如图2 所示。分析其原理。
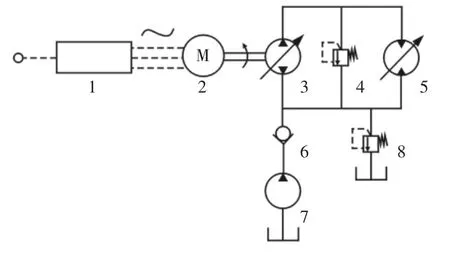
图2 变转速液压系统调速回路图Fig.2 Variable Speed Hydraulic System Speed Control Circuit Diagram
从图2 中可以看出,变量柱塞泵3 的转速是通过变频器1变频调节电动机2 的转速来实现的,电动机转速可变为n,则变量柱塞泵的输出流量QP为:
不考虑油液温度与系统压力对系统泄露的影响,即Qip、Qie、Qim均为定值,由式(4)知:马达转速nm与泵排量Dp、泵侧转速np三者成正比关系,而泵侧转速np是由电机转速n决定的,因此能够通过电机变频调速、泵排量调节等控制系统流量,马达转速也会跟随改变。
4 变转速液压动力系统模糊控制研究
4.1 模糊控制原理
模糊控制是以模糊数学、模糊变量及模糊推理为基础产生的一种计算机数字控制方式,主要由输入输出变量、模糊化、规则库、模糊逻辑推理、解模糊五部分组成[7]。
模糊控制工作原理图,如图3 所示。关键部分是模糊控制器,如下图虚线框中所示,本实验在研究过程中,通过LabVIEW软件编程可以实现该控制算法。实现该控制的过程是:由采集卡及传感器获得控制对象实际值后,与设定目标值进行作差得到偏差值,并计算得相应偏差值变化率,即可得到控制器的输入信号,将其偏差值及其变化率通过模糊化处理后得到模糊量[8]。再由控制规则计算后可得出相应输出量,再经过解模糊处理,得到一个精确量,经过一定的转换后变为数字信号,再经工控机输送给相应机构,从而能够精确控制本实验的控制对象[9-10]。

图3 模糊控制工作原理图Fig.3 Schematic Diagram of Fuzzy Control
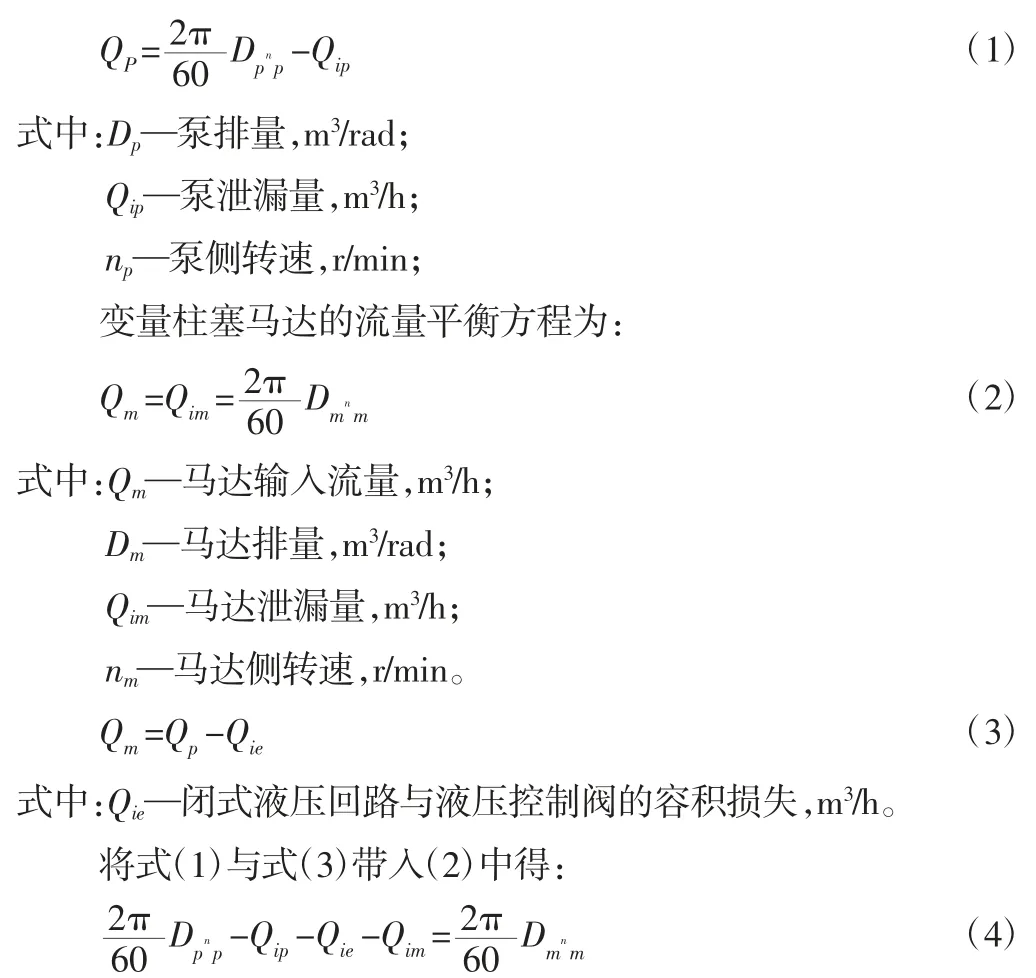
4.2 模糊控制器的结构设计
模糊控制器组成上面已经有过介绍,如图4 所示。该实验控制的是液压动力源流量,Qset、Qset分别是目标、实测流量;e、de/dt分别为流量偏差及其变化率;Ke与Kec是控制比例因子;Ku为量化因子[2]。
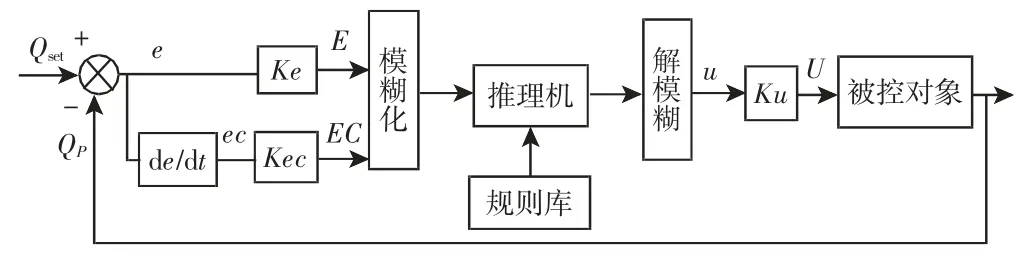
图4 模糊控制器原理图Fig.4 Schematic Diagram of Fuzzy Controller
输入变量E可由e与Ke相乘得到,同理可得EC,最终得出U输入变频器[11],通过变频调速改变电机转速,达到流量控制的目的。
为了保证控制有效性及数据计算方面的简便性,选择二维模糊控制器更符合要求,结构如图5 所示。结合研究情况,输入、输出语言变量均定为7 个,取为负大(NF),负中(NM),负小(NS),零(Z0),正小(PS),正中(PM),正大(PE)[12]。
模糊控制中选择符合要求的隶属度函数非常重要。本实验中各控制量E、EC,输出量U都采用三角型隶属度函数,该隶属度函数简单有效,适用范围广,如图6 所示。从实验中流量控制的要求考虑模糊论域,E、EC均设为[-6,6],U设为[-3,3]。选择经验归纳法对模糊控制规则进行设计,针对研究对象建立变量E、EC、U对应的49 条控制规则。推理大多使用Mamdani 推理法,重心法更多用于解模糊。

图5 二维模糊控制器Fig.5 Two Dimensional Fuzzy Controller

图6 输入、输出变量的隶属函数Fig.6 Membership Functions of Input and Output Variables
模糊控制规则是模糊控制器中知识库的一部分,是建立在语言变量的基础上,是模糊控制器的关键部分,它的正确与否直接影响到控制器的性能。模糊控制规则是根据专家知识及经验进行总结得到。根据各模糊变量的隶属度函数及控制规则,经过Mamdani 推理的合成运算及解模糊运算[13],最终可确定模糊控制规则表,如表1 所示。
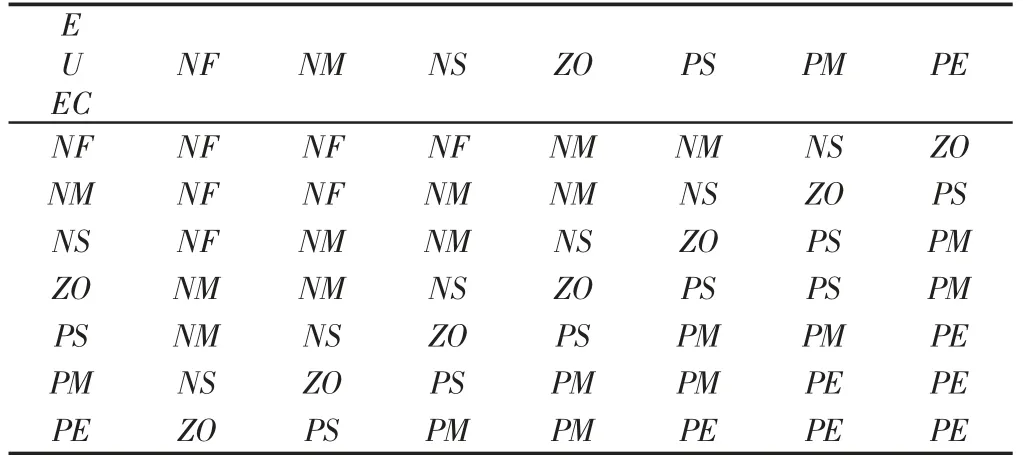
表1 模糊控制规则Tab.1 Fuzzy Control Rules
5 实验分析
变转速液压试验台现场试验装置实物,如图7 所示。由液压总成、机械总成和控制系统组成。其中变频器和变频电机组成试验台的动力装置,液压驱动系统包括变量泵、变量马达以及蓄能器等液压元件,加载系统由惯量盘、制动器以及由齿轮泵与比例溢流阀背压模拟加载构成的开式液压回路组成,使用一台研华工控机以及配套的Labview 程序控制。

图7 变转速泵控马达系统试验平台Fig.7 Variable Speed Hydraulic Test Bench
所用的检测系统包括:各种传感器、执行元件、信号调理装置、多功能数据采集卡、驱动程序、硬件管理软件、应用软件和工控机等。本实验设计的检测控制系统结构[5],如图8 所示。
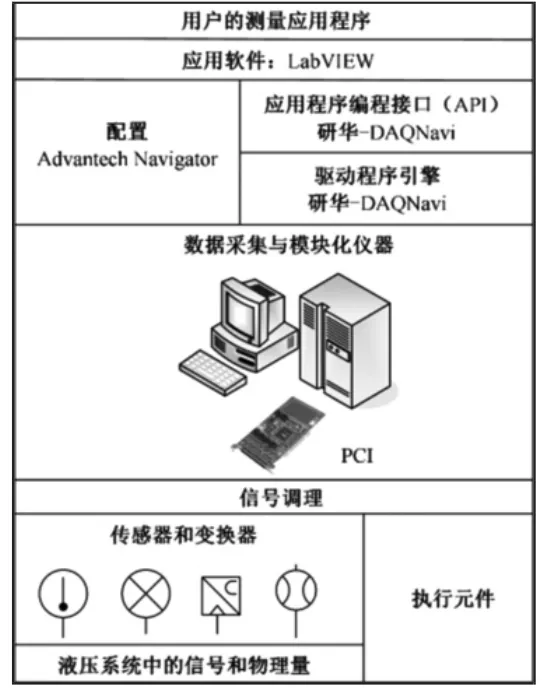
图8 检测系统结构图Fig.8 Structural Chart of Detection System
检测即通过安装的各种传感器,可对电机电流、电压、泵和马达的转速转矩、系统流量、压力、温度等参数进行实时检测,信号经接线端子板和数据采集卡,传送到工控机进行采集、显示和保存,方便研究不同工况下的系统性能。
在该试验台软硬件部分设计完成基础上,可进行不同典型工况下PID 控制和模糊控制两种方法,对该变转速液压系统动态特性和稳态精度等方面性能的影响研究。参考实际情况,选择模拟空载、正弦、阶跃、斜坡载荷四种工况来进行实验研究。
空载时流量PID 控制阶跃响应曲线,如图9 所示。温度为20.1℃,根据实验需要,调整PID 控制器参数为Kc=1.1,Ti=0.01,Td=0,本实验中目标流量都设置为0.6m3/h,由图9(蓝绿色线、红色线、蓝色线分别代表设定目标流量、压力与实际流量,以下同理)得,流量响应明显比压力慢,达到设定目标流量用时为10s,涡轮流量计会使流量响应出现一定滞后,由图可知均未出现超调现象,压力响应用时0.6s 左右,流量响应为1.8s,可计算得出延迟时间约为1.2s,可见要想达到比较理想控制效果,仅采用传统PID 控制是远远不够的[14]。

图9 PID 控制阶跃响应Fig.9 Step Response of PID Control
为达到控制要求,采用模糊控制时,各因子取值为Ke=1.5,Kec=0.006,Ku=0.55,部分参数取值与PID 一样,得出模糊控制流量阶跃响应图,如图10 所示。相比图9,在设定同样目标值时,PID用时10s,模糊控制多花了1s,均未出现超调现象,两种控制方法所得结果相差不大,都对流量进行控制时,控制器参数改变,响应速度也会发生改变。
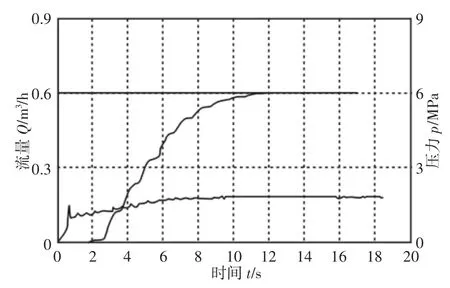
图10 模糊控制阶跃响应Fig.10 Step Response of Fuzzy Control

图11 PID 控制阶跃加载Fig.11 Step Loading of PID Control
阶跃加载工况下,流量PID 控制响应曲线,如图11 所示。实验时为20.2℃,在流量达到稳定后,由溢流阀分别模拟阶跃载荷,电压是3.5V(此时压力为7.6MPa)。压力上升时,因泵泄漏增加,流量减小,因该系统是闭环控制,改变变频器输入电压,增加电机转速[13],流量随转速升高而增大,经过8s 左右调整慢慢稳定而达到设定值[15]。
阶跃加载工况下,流量模糊控制的响应曲线,如图12 所示。对比图11,加载电压一样时,模糊控制在载荷突变时,流量同样发生波动,达到稳定约用7s,二者均未出现超调,响应速度和准确性也几乎一样。
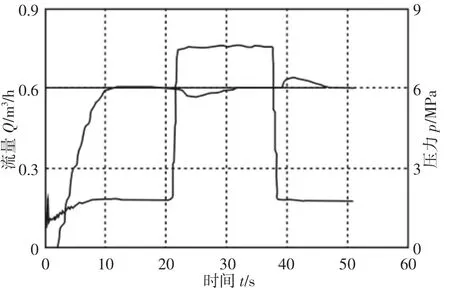
图12 模糊控制阶跃加载Fig.12 StepLoading of Fuzzy Control
模拟斜坡加载工况下响应曲线,如图13 所示。加载电压为(0~3)V(此时压力升为5.9MPa),压力变化随上升加载也按照斜坡上升,此时流量变小。与图11 中调控原理相同,闭环调节下,流量最终都能达到目标值。模糊控制下模拟系统斜坡加载工况时流量响应曲线,如图14 所示。相比图13 得出流量、压力达到稳定状态所需时间基本接近,所能达到的控制效果也较类似,温度为20.5℃。

图13 PID 控制斜坡加载Fig.13 Ramp Loading of PID Control
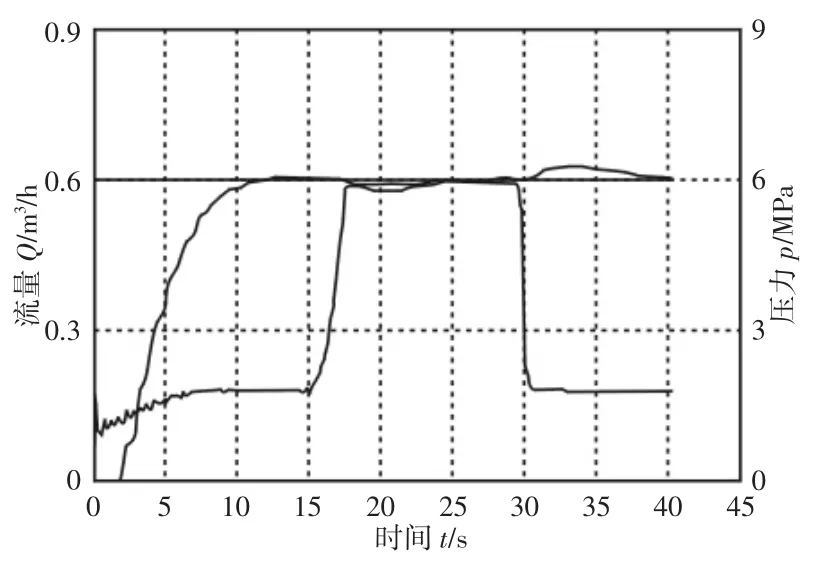
图14 模糊控制斜坡加载Fig.14 Ramp Loading of Fuzzy Control
从图15 可以看出,在测控界面选择正弦加载工况,此时系统压力也呈现相应正弦变化,频率为0.5Hz,电压最大为2V,系统流量在正弦载荷的影响下出现上下波动,经实验分析可得,加载压力越大,则系统流量波动幅度也同比例出现增大。正弦加载工况下流量模糊控制的响应曲线,温度为20.5℃,如图16 所示。相比图15,当都是正弦加载工况时,PID 控制的鲁棒性明显要比模糊控制差,验证了模糊控制具有更好的鲁棒性。通过以上实验结果分析可得,当PID 及模糊控制器均选择适当参数时,在空载以及比例溢流阀模拟阶跃、斜坡、正弦载荷工况下,在响应速度、是否准确方面,两种方法效果相差不大,都表现出相似的动态性能。而在正弦加载工况下,系统压力和流量都产生相应的正弦波动,但采用模糊控制时流量变化波动范围和幅度要明显小于传统PID 控制,结果证明:与传统PID 控制相比,模糊控制鲁棒性更强,因此模糊控制在负载工况及载荷频率变化频繁场合下有更好的适用性。

图15 PID 控制正弦加载Fig.15 Sinusoidal Loading of PID Control
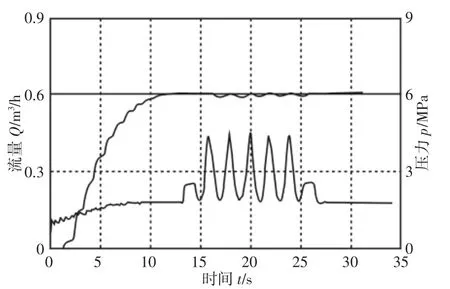
图16 模糊控制正弦加载Fig.16 Sinusoidal Loading of Fuzzy Control
6 结论
(1)采用异步电机驱动柱塞泵作为新型液压动力源,克服了传统阀控液压系统能耗高、结构较复杂等不足,且该变转速液压系统具有节能、易于控制、响应速度快等优点。(2)基于变转速液压动力系统,针对传统PID 控制中存在的复杂多变工况时控制效果不理想、响应时间长等问题,结合模糊控制原理,提出液压动力源流量模糊控制策略。(3)编写Labview 测控程序,结合工程实际,模拟了四种工况,分析比较了PID 控制与模糊控制的不同特性,可得两种控制方法在响应速度、稳定性和控制精度方面都达到较好的效果,但模糊控制相比PID 控制鲁棒性更好,在负载工况及载荷频率多变的场合有更好的适用性,具有较强的推广应用价值。
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28
天津教育·下(2018年9期)2018-07-13
中学生数理化·高一版(2018年6期)2018-07-09
小学生导刊(2017年15期)2017-05-17
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
中学生数理化·高二版(2016年9期)2016-05-14
电测与仪表(2015年16期)2015-04-12
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2012年1期)2012-10-12