深基坑监测数据处理方法研究
2021-05-06 02:15柴新宇
黑龙江科学 2021年8期
柴新宇
(广东工贸职业技术学院,广州 510510)
0 引 言
通过沉降观测,可以得到建筑物及其配套设施准确可靠的沉降数据(沉降和差异沉降量),可以了解不同荷载下地基随时间的变形规律,真实地反映建筑物和支撑设施的沉降情况,提供建筑物的沉降参数[1],所积累的资料和经验可为今后类似工程设计提供类比依据。通过对位移计算和最终平移计算的分析,及时发现建筑物的不利沉降现象,从而采取措施保证施工的顺利进行和周围建筑物的安全使用,为今后的合理设计提供了数据,对工程进行施工监测[2]。
1 工作方案
1.1 监测方案
监测项目主要包括:支护结构水平位移,支护结构垂直位移,周围建筑物沉降监测。沉降观测是一项精密细致的工作,水准基点是观测的基础,点应埋在变形区外的基岩或原状土层上,也可采用稳定建筑物[3],当条件限制时,深金属管水准点也可埋在变形区内,点位坚固稳定,便于长期使用。本工程在医院北侧布置2个水准基点,便于随时检测水准点的稳定情况。基准点采用电锤,水平钻直径20 mm孔,孔深20~25 cm,植入Φ18钢筋并用建筑结构胶粘结牢固。钢筋端部焊接直径为20 mm的镀铬球,球上最高点为该点的标记[2]。
1.2 沉降观测点的布置
周围建筑物沉降观测点的布置。基坑北侧有地铁,距离基坑开挖边线最近距离大约9 m,基坑靠近基坑开挖侧边线,均在基坑的影响范围内。因此,在3号楼外墙设置20个观测点,观测点高出自然地面30 cm,每个点用电锤钻孔,孔深20~25 cm,洞的直径是20~25 cm,Φ18钢筋预埋,与建筑结构胶粘结牢固。
布置基坑沉降观测点。基坑周长306.5 m,拐点比较多,且各条边长短不等。根据实际情况,按照一定距离,在基坑的每一角和直线段处布置20个垂直位移观测点,每个点均在冠梁顶端及微型钢桩顶面上砌筑300×300×300 mm(长×宽×高)混凝土墩,将球状沉降观测点标志安装在混凝土墩中心。
1.3 沉降观测与位移观测
观测仪器采用美国产S05型号的天宝dini03精密光学水准仪、精密铟钢条码水准尺。每次观测前,必须对仪器进行检验校正,其i角不得大于15″。观测时的视距长度≤30 m,前后视差≤0.7 m,前后视距不等,累计差≤1.0 m。为减少误差,每次观测由固定人员观测,固定测站位置[4]。

2 沉降观测和位移观测
2.1 沉降观测和数据处理
由基准点及工作基点组成平面控制网,用基准点前方交会法测量监测工作基点的稳定情况,测角中误差±2″,导线全长相对闭合差1∶45 000。
用精密水准测量方法进行垂直位移监测。由工作基点开始测量,经过作为水准点的监测点可以形成多个闭合水准路线或附和水准路线,一般采用闭合水准路线。如果检测地区地形比较复杂,难以构成闭合或者附和水准路线,也可采用支水准路线进行往返测量[6]。严格控制前后视距差和前后视距累积差,可有效减弱磁场和大气垂直折光的影响。检测期间为了保持误差稳定性,需要固定检测仪器、检测人员、检测路线和检测测站,检测周期和监测时段相对固定[7]。
根据水准测量规范对观测程序的要求,水准测量往测时,奇数站的观测顺序为“后前前后”,偶数站的观测顺序为“前后后前”。返测时,奇、偶数站的观测顺序对应往测时的偶、奇数站[8]。
未经检定的标尺长度属于名义长度,需要在实验室进行检校得到标尺实际长度,当超过一定误差时应进行相应改正(尺长改正、温度改正、倾斜改正等)。奇数测站为后-前-前-后,偶数测站为前-后-后-前。
采用正确的观测步骤进行测量观测。共选择20个观测点,一年观测了6期18次,数据见基坑垂直位移监测阶段报表,选择其中二期数据列出表1、表2。

表1 基坑垂直位移观测数据 (1~3次)
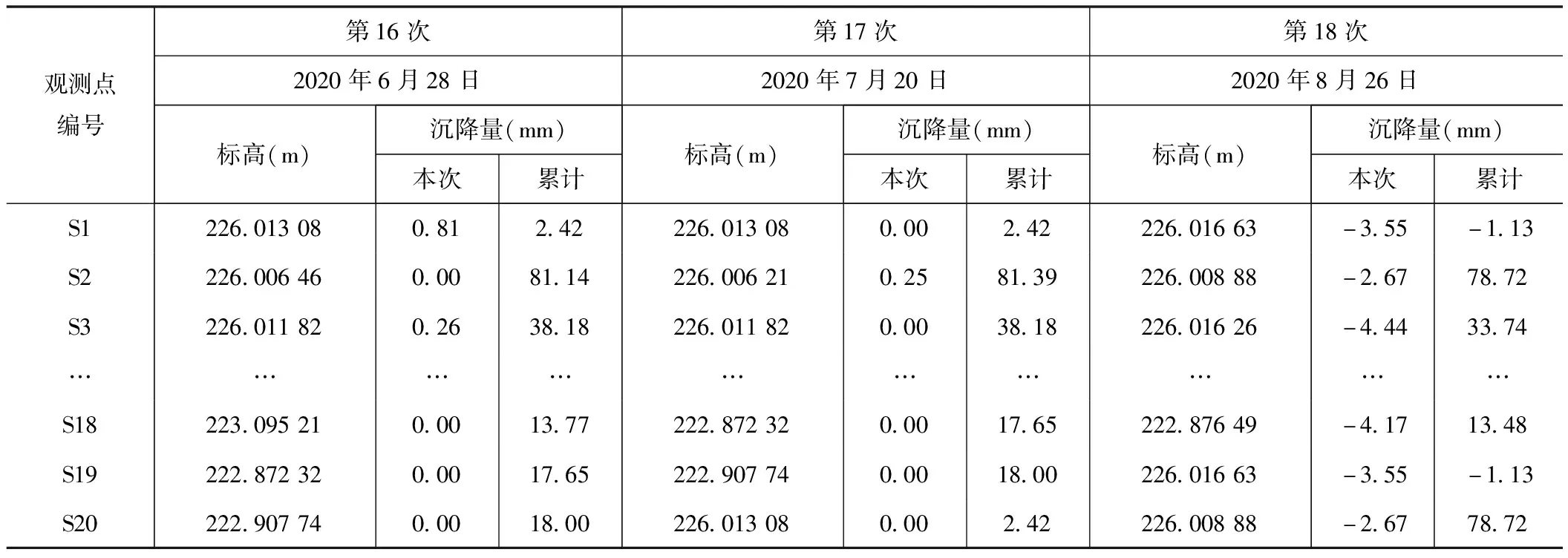
表2 基坑垂直位移观测数据 (16~18次)
数据处理结果绘图。为了预估下一次观测点沉降的大约数值和沉降过程是否渐趋稳定或已经稳定,可分别绘制时间与沉降量关系曲线和时间与荷重的关系曲线。其中,时间与沉降量的关系曲线:纵轴为沉降量S,横轴为时间T,根据沉降观测量和观测日期按照比例得到坐标画出每个点位置,然后各点连接起来。时间与荷重的关系曲线:纵轴为荷载重量P,横轴为时间T。根据每次荷载重量和相应观测日期,按照比例画出每个点位置,将点连接起来见图1。

图1 时间、荷重、沉降量曲线图
2.2 水平位移及数据处理
由于各变形监测点往往向基坑内移动,在边坡稳定的条件下,大部分点移动较为均匀,当各观测点坐标观测值精度相同时,各点坐标权重相等,因此最小二乘估计接近于大多数一致运动点[9]。在与大部分匀速运动点相差较大的点中,加入了坐标改正较大的点,使[δδ]/n显著增加。
用工作基点采用双测站极坐标观测,每次测量前必须对仪器进行检验,半测回归零差≤±8″,一测回内2C互差≤±13″,每次固定人员观测,严格定向。
根据第一次观测的坐标确定基准。
数据处理程序设计流程:
A.分析问题:对要解决的问题,必须分析清楚,明确具体要求,找出其内在规律。
B.建立数据库及其对应的数学模型,按照分析结果建立相应的数据库及数学模型。
C.选择算法[10]:建立数据库和数学模型后,选择解决问题的最佳算法。选择算法时要注意算法的逻辑结构尽可能简单,避免不必要的循环,减少算法执行时间,在满足题目条件要求下使所需计算量最小。
需要求出每次测量的形心坐标,计算出坐标平移量(形心坐标之差),以后的计算求出每个三角形的形心坐标之差。各个三角形的形心坐标之差公式:ΔX=Xn-Xi,ΔY=Yn-Yi。用它在坐标系上的投影来表示,以沿坐标轴正方向为正,负方向为负,3个投影称为在该点的位移分量。一般说来,位移分量也是坐标的函数:
其余的三角形同理可求出边长D、方位角A及角度。
D.编写程序:以此次计算的坐标为基准点构成基准平面。程序设计中,编辑DATA_O.TXT得到第一次观测数据DATA_O.TXT,打开VFP6,输入MODI FILE?进入编辑数据文件,打开DATA_I,进入程序编辑界面。
E.调试运行:查看程序是否满足具体要求,如果没有达到实际要求,应对程序反复进行修改调试,直到满足实际要求为止。模拟计算点是专门为此次设计设定的,移动量统一为 5 mm,总共设置了 20个监测点,分别命名标记为C1~C20。根据相关规范和施工要求,计算各点位移量报警值,如表3。

表3 位移量报警值
通过处理完成后,分析数据,以最后一次测量坐标为例,变形图如图2。

图2 水平位移对比图
监测数据按要求记录,当出现异常情况,应加密监测点,并立即上报相关单位,采取紧急措施。通过上述数据显示,C2、C3、C4...C21 位移变化量趋于稳定,其中C6点与C8点监测数据发生较大位移,超过报警值,可能出现问题,因此上报相关部门调整,及时加固,确保施工。
发现问题点后,对数据进行重新优化,结果如下:
DELTA_A=FRAD(-0.00075000000101)
[vv]=0.000227159897276
用多边形法对某医院工程第 6 次测量结果进行数据处理,准确地给出了变形异常点中C6、C8点发生较大位移,对C6、C8点及时进行了加固,确保了施工安全,且实测变形规律与数值模拟得到的变形规律基本一致。数值模拟后的程序可以成功运用于实际工程施工中,因此多边形法符合基坑水平变形监测网的共有特征,具有实用性。简化了外业测量环节,显著提高了测量精度。依据相对基准计算监测点相对水平位移量,简化了数据处理运算,可以很好地指导实际工程施工。
猜你喜欢
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
现代农村科技(2021年2期)2021-03-15
北京测绘(2021年1期)2021-02-05
绿色科技(2019年12期)2019-07-15
家庭影院技术(2018年11期)2019-01-21
科技视界(2016年19期)2017-05-18
电子制作(2017年20期)2017-04-26
中小企业管理与科技·中旬刊(2014年10期)2015-02-03