汽车VS 二轮车十字路口事故场景研究
2021-05-07 12:47罗俊任张道文车瑶栎
汽车电器 2021年4期
罗俊任,张道文,2,张 友,车瑶栎
(1.西华大学汽车与交通学院,四川 成都 610039;2.汽车测控与安全四川省重点实验室,四川 成都 610039)
《2018年全球道路安全现状报告》显示:道路交通死亡人数继续攀升,每年死亡135万人,道路交通伤害是5至29岁儿童和年轻人死亡的主要原因[1]。同时国家统计局数据显示:2018年中国发生二轮车道路交通事故共73270起,造成14776人死亡、85778人受伤。因此,提高中国道路交通安全,减少道路使用者伤亡,尤其是减少十字路口汽车与二轮车事故伤亡,是道路交通安全研究的重要内容。
十字路口是道路交汇处,也是最容易发生交通冲突的区域[2]。交通参与方通过十字路口面对交通冲突时,一旦不能采取及时、有效的措施,交通冲突会转变为交通事故。资料显示[3]:美国发生在交叉路口的交通事故占比为36%,中国城市道路交叉路口事故数占比约为30%。交叉路口道路安全现状不容乐观,特别是发生在十字路口汽车与二轮车事故,骑车人伤亡情况严重。为了减少十字路口汽车与二轮车事故,有必要基于真实事故数据研究十字路口汽车与二轮车事故场景。
目前,国内外对危险场景开展了一系列的研究。Lenard J等[4]聚类分析了英国事故数据,获取了人车事故的典型测试场景;李霖等[5]对上海地区的自然行驶工况进行聚类分析,得到了涉及骑车人的典型危险工况场景库;曹毅[6]基于NAIS事故数据,选择照明情况、道路情况等6种参数描述人车事故场景,通过聚类分析获得5种人车事故场景;胡林等[7]基于车与二轮车事故数据研究两轮车自动紧急制动系统 (Autonomous Emergency Braking,简称AEB)测试场景,为两轮车AEB测试奠定基础;周华[8]等基于NAIS事故数据为智能汽车研发提供场景推演方案,获得了5类符合中国道路交通情况的十字路口乘用车与二轮车典型危险场景;2007年,美国国家公路交通安全管理局 (National Highway Traffic Safety Administration,简称NHTSA)为避免交通事故,拯救生命,首先提出37种预碰撞场景[9];欧盟新车安全评鉴协会 (European New Car Assessment Programme,简称Euro NCAP)重点关注碰撞场景和道路弱势群体的AEB技术[10],并从2014年,首次将AEB纳入其评价体系。2018年后,将重点研究用于避免或减轻乘用车与骑车者碰撞的自主紧急制动系统[11]。国内外学者研究重点放在人车事故方面,对特定场景下汽车与二轮车的危险场景研究相对缺乏。
国内外学者开展了许多汽车与二轮车交通事故相关研究,国外形成了丰富事故场景和避险策略,如AEB系统和相应的测试场景的研究等。但是国外的交通情景难以完全反应中国多元的交通工况,需要基于中国事故数据深入分析。国内研究获得了人车事故和车与二轮车事故典型场景,但针对中国十字路口汽车与二轮车事故场景的关键参数研究较为缺乏。因此,基于国家车辆事故深度调查体系 (National Vehicle Accident In-depth Investigation System,简称NAIS)深度调查事故数据,筛选发生在十字路口汽车与二轮车事故,通过聚类分析探究典型场景,其结果为十字路口汽车与二轮车的冲突消解、防撞策略研究提供参考。
1 样本数据来源
国家车辆事故深度调查体系在2007年就开始对中国车辆事故开展了深度调查,目前已经积累具有中国交通特点的丰富事故数据。NAIS按严格规范进行事故信息勘探、事故再现与分析,将相关信息汇总到NAIS数据库。NAIS数据对人员受伤情况和事故严重程度描述,如表1所示。

表1 事故伤害描述
从NAIS数据库中选取车辆交通事故数据分析,对样本集进行抽样,抽样标准如下。
1)事故发生地点为十字路口。
2)参与方数目为2,且二轮车为参与方,包括摩托车、电动二轮车、自行车。
3)汽车为前端碰撞,排除后部碰撞等特殊情况。
对203起符合选取标准的事故的信息缺失值进行补齐和取舍,最终剩余191起事故案例进入聚类分析阶段。
2 样本数据描述
研究十字路口汽车与二轮车事故场景从车辆、道路、环境三方面着手。环境因素有事故发生时环境照明情况、十字路口信号灯情况、汽车所在道路车道数、道路限速情况。车辆参数包括汽车种类、汽车速度、汽车运动方式、第一碰撞点;二轮车方面包括二轮车种类、二轮车运动方式。研究变量与赋值如表2所示。
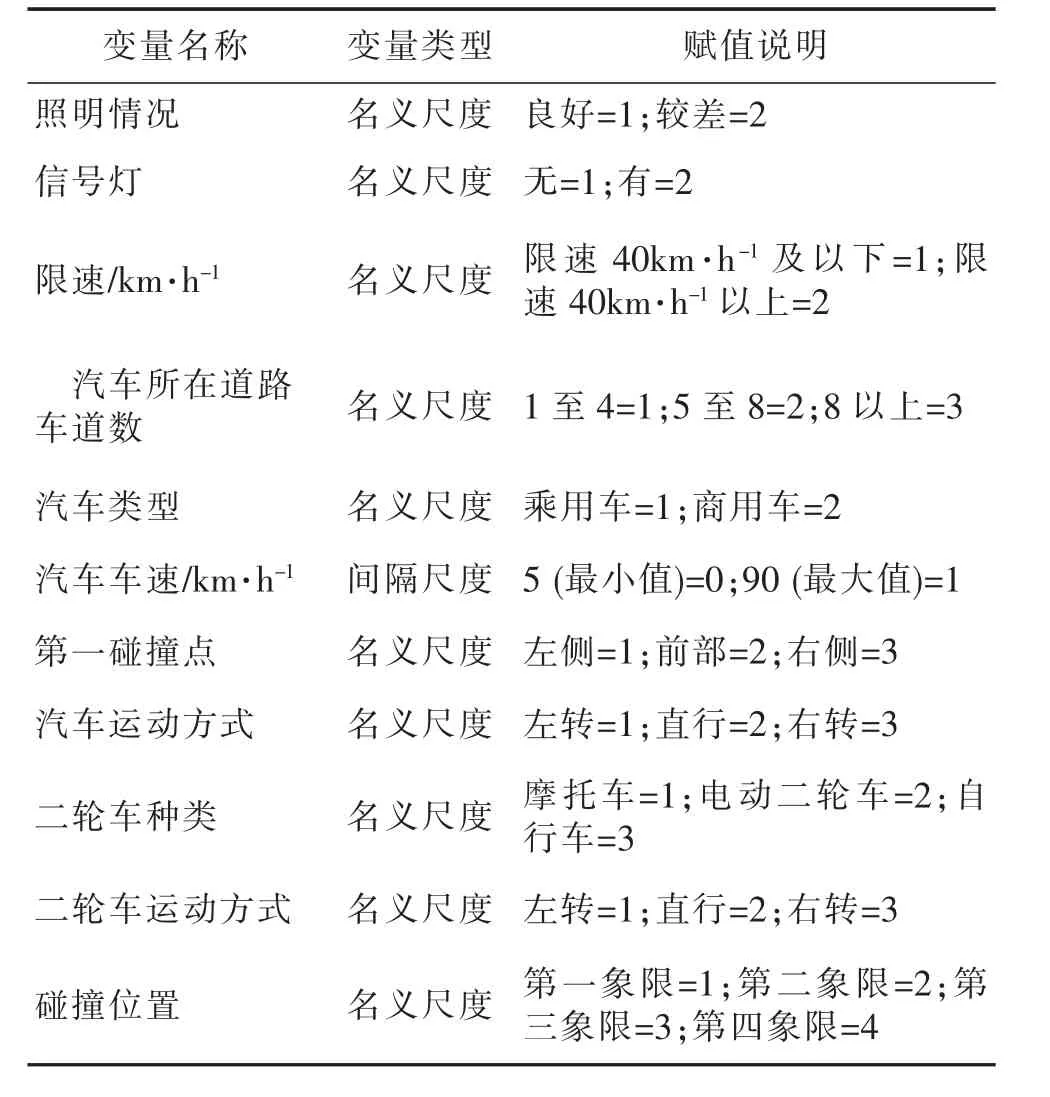
表2 变量与赋值
变量中第一碰撞点表示碰撞时二轮车与汽车第一接触部位,第一碰撞点分为左侧、前部、右侧3部分,第一碰撞点分布情况如图1所示。碰撞位置是指基于十字路口建立直角坐标系,汽车驶入方向为Y轴正方向,进而将十字路口分为4个象限如图2所示,碰撞位置是汽车与二轮车发生碰撞的位置。

图1 第一碰撞点分布
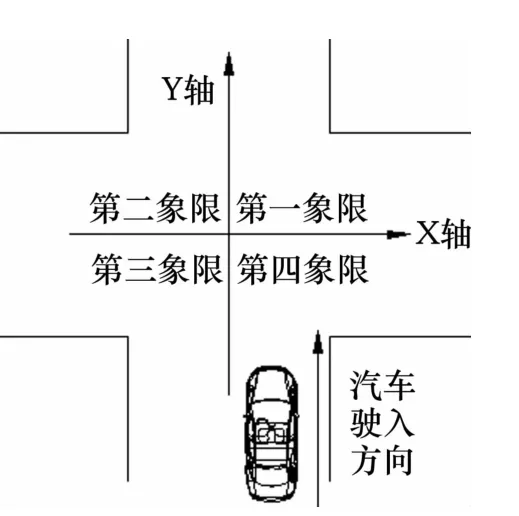
图2 碰撞位置分布
样本中总体变量分布情况如图3所示。样本中事故发生时,照明情况良好、路口有信号灯、车道数为1至4、汽车为乘用车、汽车运动方式为直行、二轮车为电动二轮车、碰撞位置在第四象限、前端碰撞的事故比例较高。
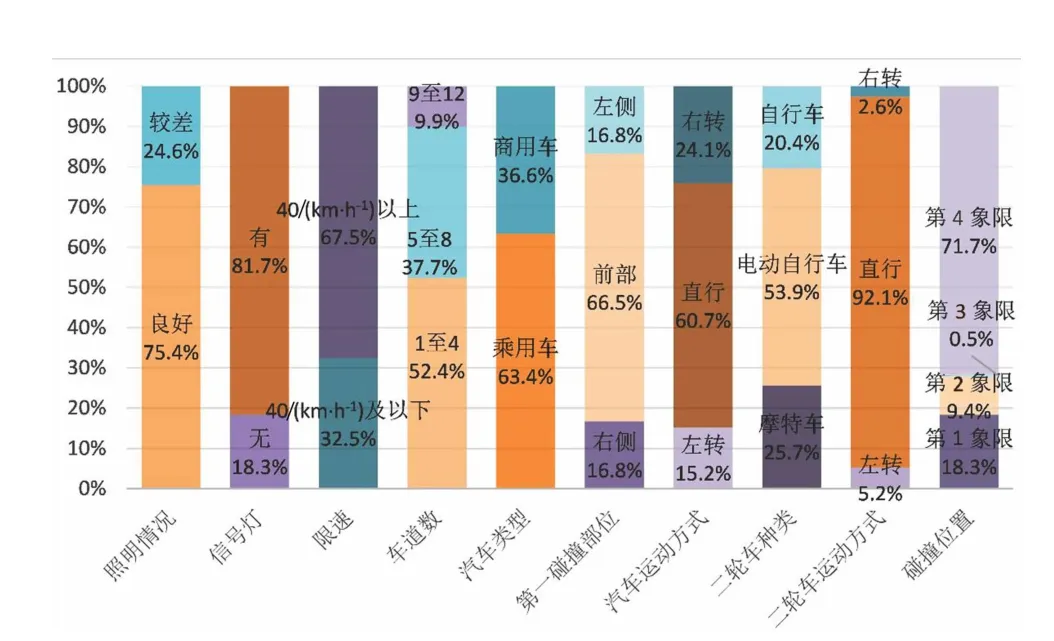
图3 变量分布情况
3 聚类分析
十字路口汽车与二轮车事故涉及多元的交通工况,运用聚类分析将繁杂事故工况聚类为简洁的几种场景,便于探究典型场景。聚类分析根据分类对象的不同分为Q型聚类和R型聚类两类,R型聚类是对变量进行分类处理,Q型聚类是对样本进行分类处理[12]。运用Q型聚类方法分析十字路口汽车与二轮车事故场景。典型聚类算法有层次聚类、k均值算法等。基于层次聚类法分析数据可便捷得到聚类结果,层次聚类首先将n个样本看成n类事物,然后根据样本间距离差异,把距离小的两类合并为一类,得到n-1类,重复上述步骤,最后直到将所有事物归为一类。层次聚类依据的是距离,距离分为变量间距离、样本间距离、类别间距离。变量间距离计算由变量类型决定,研究变量涉及名义尺度变量和间隔尺度变量,其中名义尺度变量是没数值关系但有类别差异的变量,间隔尺度变量是具有顺序数据的性质,并可以按某一固定度量单位表示数值间的间隔的变量。名义尺度变量间距离d1计算公式为:

间隔尺度变量需按比例关系映射到其取值区间,映射关系为:

式中:a——间隔尺度变量所有取值集合。
间隔尺度变量间距离d2计算公式为:

式中,bi、bi取值范围为[0,1]。样本间距离选择便捷的曼哈顿距离。设有n个样本,每个样本中有m个变量,因此每个样本可用向量Xi表示:

式中:Xij——样本集中第i样本的第j个变量,则第i个样本与第j个样本的曼哈顿距离为d(Xi-Xj),其计算公式为:

类别间距离选择类平均距离作为聚类依据。设Gp、Gq为两个不同类别,分别含有p、q个样本,则Gp、Gq的类间距离为Dpq。

运用类平均距离作为类别分类依据进行聚类,绘制类平均距离方法聚类的不一致系数曲线,如图4所示。发现182次聚类后不一致系数变化加剧,表明前一步聚类效果较好,于是,初步得到9类十字路口汽车与二轮车事故危险场景[13]。统计每类场景事故分布情况及占比,结果如表3所示。
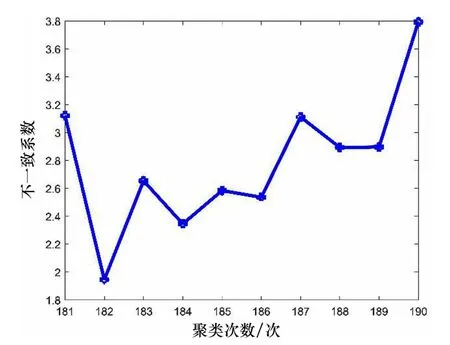
图4 不一致系数曲线
聚类结果显示1、5、6、9号场景占样本比例不足7%,对场景描述支撑不足,因此选取比例之和为93.2%的2、3、4、7和8号5类场景作为主要事故场景进行深入分析。选择每类场景事故案例数比例超过50%的变量作为场景特征变量,不足50%的变量,选择比例较大的两种变量作为特征变量候选,并对比此两种变量对应的骑车人死亡占比和事故严重占比,选择伤亡风险和事故严重程度占比大的变量作为场景特征变量。通过对车道数进行统计,选择众数作为场景的特征变量。因此,1至4车道选取4车道作为场景汽车所在车道数,5至8车道选取6车道作为场景汽车所在车道数,9车道以上选取10车道作为场景汽车所在车道数。对每类场景汽车速度分布统计,基于每类场景25%~75%速度确定场景汽车速度范围。因此,获得5种主要十字路口汽车与二轮车危险场景如表4所示。
5种主要场景共同因素为照明情况良好,电动二轮车直行进入路口,第一碰撞点为前端。不同因素表现在汽车类型,4号和7号场景汽车为商用车,其他均为乘用车;信号灯情况,3号场景路口无信号灯,其他事故场景发生时,路口有信号灯;限速情况,3号场景限速40km·h-1及以下。其他场景限速高于40km·h-1;对比不同场景中汽车车速,商用车场景4和7号场景均低于乘用车场景;8号场景为二轮车为摩托车,其他场景为二轮车为电动二轮车;3和4号场景的车道数4,其他场景均为6;8号场景汽车运动方式为右转,其他均为直行;8号场景的碰撞位置为第二象限,其他均为第四象限。

表3 聚类结果
4 典型场景研究
探究5种主要场景中骑车人发生死亡风险的差异性,运用Logistic回归分析,进行骑车人死亡概率与场景的相关研究。
OR (Odds Ration):在特定条件下事件发生概率与事件不发生概率之比:

Logistic回归

式中:P——事件发生概率,其取值范围为[0,1];α——截距参数;βi——对应的偏回归系数。
5种主要危险场景为自变量,骑车人是否死亡为因变量,运用二元Logistic回归方法分析各类主要场景骑车人发生死亡的相对概率,其结果如表5所示。
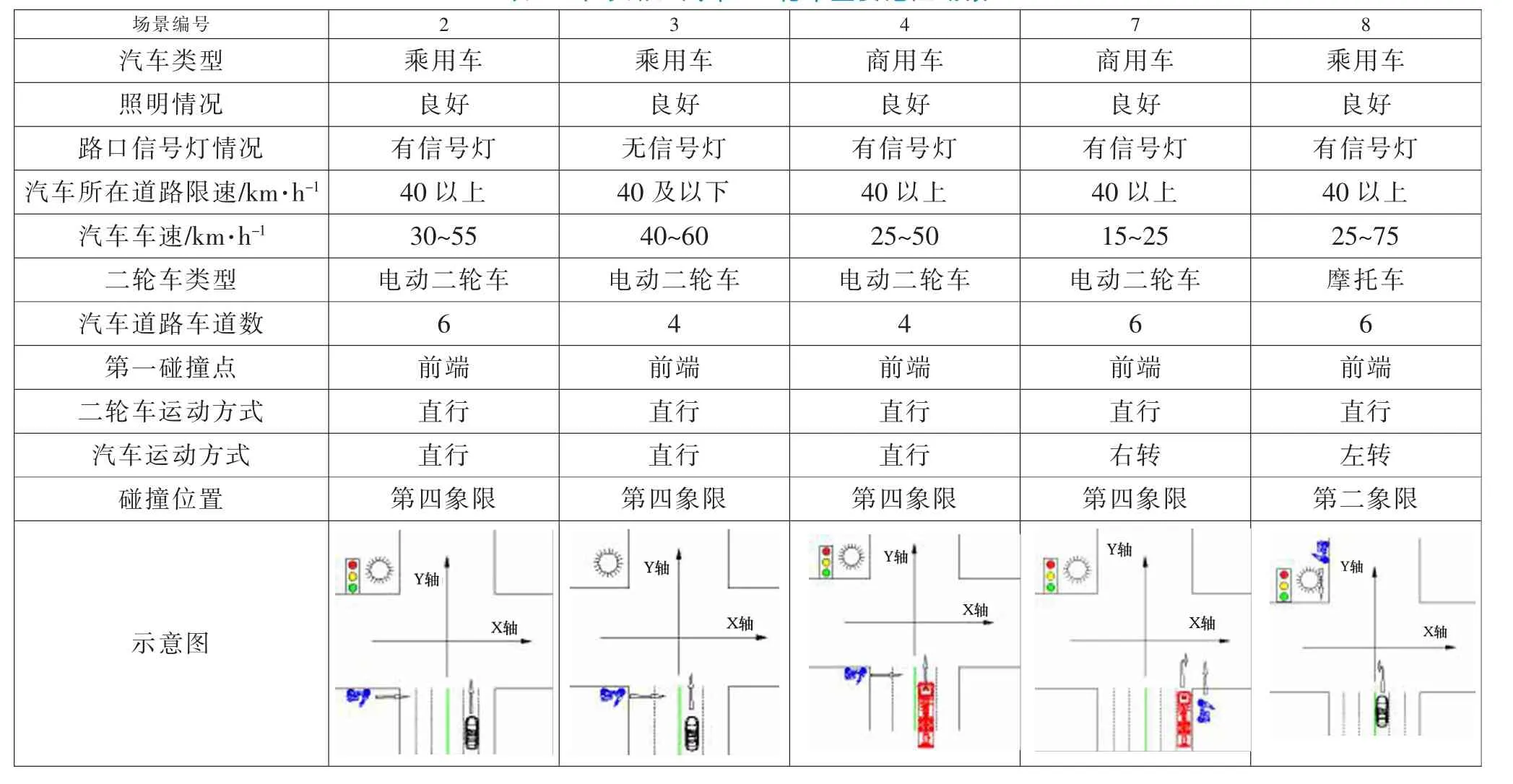
表4 十字路口汽车-二轮车主要危险场景

表5 场景与骑车人死亡风险的逻辑回归分析结果
逻辑回归分析结果表明,5种主要场景中骑车人死亡概率差异存在统计学意义,其中以场景8为参照组 (OR=1),则场景7造成二轮车骑车人死亡的风险最大(OR=5.385)。这是因为参与方是商用车与电动二轮车,由于商用车质量相对乘用车体型较大,同时车辆发生转向,虽然通过路口速度缓慢,一旦碰撞事故极易发生碾压事故造成骑车人严重伤害。
2号场景是照明良好,路口有信号灯,处于6车道的直行乘用车与直行电动二轮车在第四象限发生前端碰撞,在聚类结果比例为34.2%,比例最高;7号场景是照明良好,路口有信号灯的条件下,处于6车道的右转商用车与直行电动二轮车在第四象限发生前端,骑车人死亡风险最高。因此,选择此两类场景作为十字路口发生汽车与二轮车事故的典型场景。
5 结论
1)对真实事故数据聚类获得5类十字路口汽车与二轮车主要危险场景。
2)基于发生频率最大和骑车人死亡风险最高的场景具有危险场景代表性,获得两类十字路口汽车与二轮车的典型事故场景。
3)十字路口汽车与二轮车典型事故场景,为消解十字路口冲突,减少事故提供参考。
4)交叉路口类型多样,丁字路口、环岛路口等类型的交通事故场景有待进一步研究。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
北京航空航天大学学报(2022年8期)2022-08-31
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
新传奇(2019年51期)2019-05-13
发明与创新·大科技(2017年5期)2017-05-16
民间故事选刊·上(2017年4期)2017-04-07
小天使·五年级语数英综合(2015年6期)2015-07-08
人民周刊(2009年12期)2009-01-25