
立面三维可越障清洁机器人系统
2021-05-07 02:16周倪敏刘超峰
轻工机械 2021年2期
周倪敏, 刘超峰, 张 航, 方 彤, 刘 杰, 董 成
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
随着建筑技术的发展,城市建设高层及超高层建筑已成为普遍现象。因此,高层建筑清洁维护也产生了更多需求。目前,高空外墙清洁维护仍以“一人一板”的方式进行,这种方法危险性极高,事故频发。国内外正在研究开发兼备安全和高效的机器人系统,把人类从高空等危险壁面作业环境中解放出来[1-2]。此类研究的主要方向是开发一种立面移动机器人系统,该机器人系统可以在外墙上移动,攀爬越过各种外立面障碍物并执行特定的维护任务[3]。该类机器人的关键技术在于机器人需要具备稳定附着在各类壁面上的能力以及越过窗框等典型障碍物的能力[4-6]。因此,课题组设计制作了一种立面三维清洁机器人,该机器人采用无人机动力作为其驱动力来源,并在4根具备一定预紧力的软导轨上运动,该机器人具备6自由度姿态调整能力,灵活度高,且具备良好的越障能力。
1 机器人系统设计
1.1 机械系统设计
课题组提出的立面三维可越障清洁机器人系统主要由5个部分组成:升降机构、钢缆、机器人主体、配重小车及软导轨,如表1及图1所示。升降机构由40钢材拼接制成,上方安置了卷扬机和配重块,为方便机器人作横向运动,在楼顶升降机构及楼底配重小车底部还分别安置了可自锁万向轮。机器人主体通过钢缆与楼顶升降机构连接,并在升降机构与配重小车连接的软导轨上运动,预紧的软导轨具有一定的张力,在空中约束机器人位置的同时,又不会过度影响机器人的自由度,使机器人在一定程度上具有更好的稳定性。

表1 机器人系统基本参数
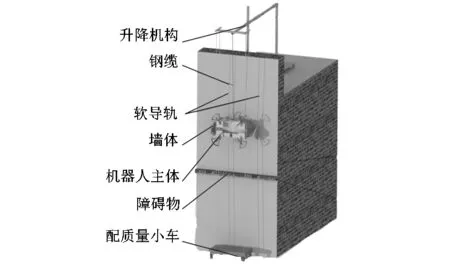
图1 机器人机械系统Figure 1 Mechanical system design for robot
如图2所示,机器人的主体主要由4旋翼无人机系统、多种传感器、辅助越障机构、清洁系统组成。4旋翼无人机系统在机器人背部利用空气推进的原理产生壁面附着力,使机器人紧贴在壁面上运动。通过多种传感器判断机器人与墙面及障碍的距离位置,分别对应调节各旋翼转速,可实时调整机器人的姿态,以适应不同介质的墙面,降低了机器人对作业表面属性的依赖程度[7]。因无人机系统可能存在响应迟滞甚至控制失灵的情况,课题组添加了辅助越障轮机构,其采用履带式行星轮结构,机械结构简单,垂直越障稳定性高,提高了机器人的越障可靠性。其清洁系统为2个盘刷机构,设置在机器人正面。

图2 机器人主体结构Figure 2 Structure of body
2 机器人运动研究
2.1 机器人坐标转换与运动学模型建立
立面三维可越障清洁机器人在工作过程中的姿态和位置变化在空间中都是相对的,首先建立机体坐标系B(xb,yb,zb)和惯性坐标系E(xe,ye,ze),如图3所示,机器人几何中心建立在坐标原点[8]。
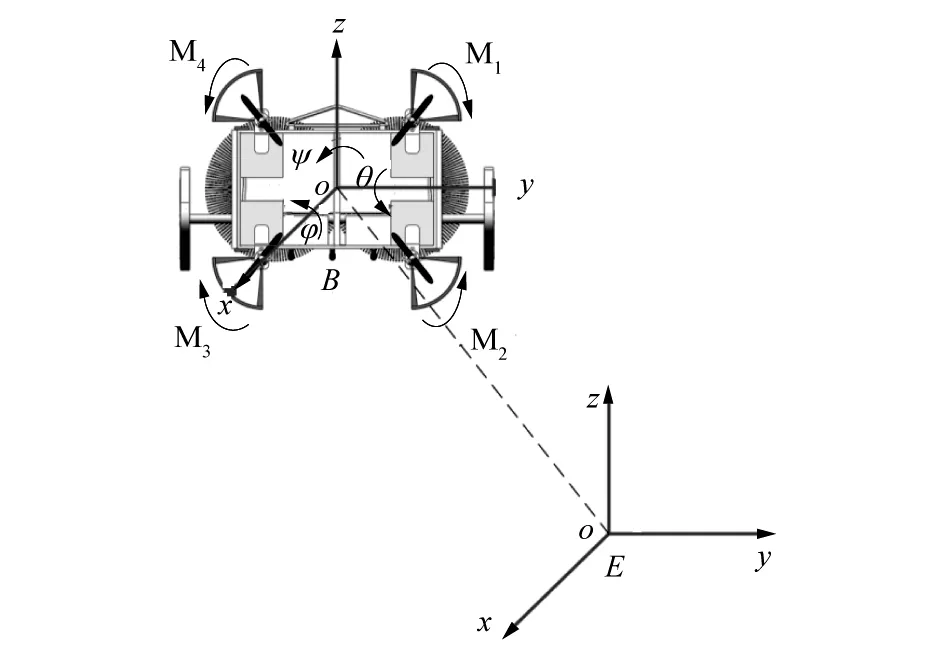
图3 机器人坐标系及坐标系转换Figure 3 Robot coordinate system and its conversion
转换关系如式(1)所示:
(1)

ξ包括机器人本体在惯性坐标系中的线性位置ΓE与角度向量ΘE,表达式如式(2)所示:
ξ=[ΓEΘE]T=[xyzΦθψ]T。
(2)
式中:ξ为机器人在惯性坐标系中广义位置和姿态向量;ΓE为机器人在惯性坐标系中位置向量;ΘE为机器人在惯性坐标系中姿态角;x为机器人在惯性坐标系中X轴的位置;y为机器人在惯性坐标系中Y轴的位置;z为机器人在惯性坐标系中Z轴的位置;Φ为机器人在惯性坐标系中X轴姿态角;θ为机器人在惯性坐标系中Y轴姿态角;ψ为机器人在惯性坐标系中Z轴姿态角。
Rδ是机体坐标与惯性坐标的旋转矩阵,Tδ是坐标之间的角速度转换矩阵,表达式如式(3)、(4)所示:
(3)

(4)
整理后可得清洁机器人的运动学模型如式(5)所示:
(5)
2.2 机器人运动策略
作为一种特殊的机器人,立面三维可越障清洁机器人的安全性和可靠性会受自身重力的极大影响。在本研究中,采用升降机构的牵引力作为驱动力,释放钢缆的同时,机器人沿着外墙表面向下移动。该方法优点在于:简化机制、减轻机器人本体质量、提高机器人安全性。且独立的升降机构可控制机器人本体的2个活动自由度,如图4所示。

图4 机器人Y,Z方向移动Figure 4 Movement of robot in Y and Z direction
1) 机器人Y方向移动自由度:沿y轴方向移动楼顶的升降机构及楼底配重小车,在钢缆的牵引下,使机器人沿y方向作被动移动,使机器人可根据环境及控制指令,随时更替工作面。
2) 机器人Z方向移动自由度:机器人与楼顶升降机构通过钢缆连接,在升降机构的牵引力和机器人的力的作用下,钢缆牵引机器人沿着Z方向作竖直上下运动。
为保证立面三维可越障清洁机器人的空中机动灵活性和对墙面环境的适应性,本机器人采用联动性更好的“×”模式4旋翼无人机系统技术,利用风压作为驱动力。如图3所示,4旋翼对称布置,为抵消每个螺旋桨产生的扭矩,设置M1和M3顺时针旋转的旋翼,M2和M4逆时针旋转的旋翼,通过改变4旋翼推力来产生各种动作,风压方向背向外,通过同时调节各旋翼的转速调整风压,控制机器人本体的4个活动自由度。
1) 机器人X方向移动自由度:机器人背部4个旋翼同时增加或减小相同的转速,产生风压,驱动机器人作垂直于楼面方向的移动,即X方向,如图5所示。

图5 机器人X方向移动Figure 5 Movement of robot in X direction
由机器人受力分析图6可知,要使机器人贴合墙面正常工作,需满足:

(6)
式中:∑Ti为平台上方软导轨张力,i=1,2,3,4;∑Tj为平台下方软导轨张力,j=5,6,7,8;α为平台上方软导轨离初始位置偏移角度;β为平台下方软导轨离初始位置偏移角度;G为机器人本体重力;T为钢缆拉力;f为墙面与清洁装置间的摩擦力;∑Fk为旋翼推力,k=1,2,3,4。
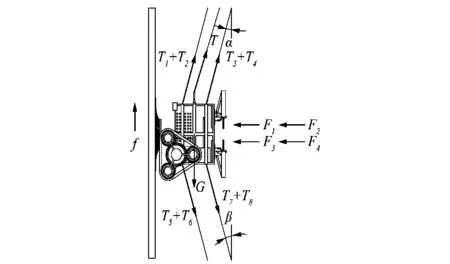
图6 机器人受力分析Figure 6 Force analysis of robot
2) 机器人绕Y方向转动自由度:通过同时增加机器人背部旋翼M1和M2或减小M3和M4的转速,可使机器人绕Y轴作正向旋转,反之,同时增加M3和M4或减小M1和M2的转速,可使机器人绕Y轴作反向旋转,即机器人的俯仰运动如图7所示。
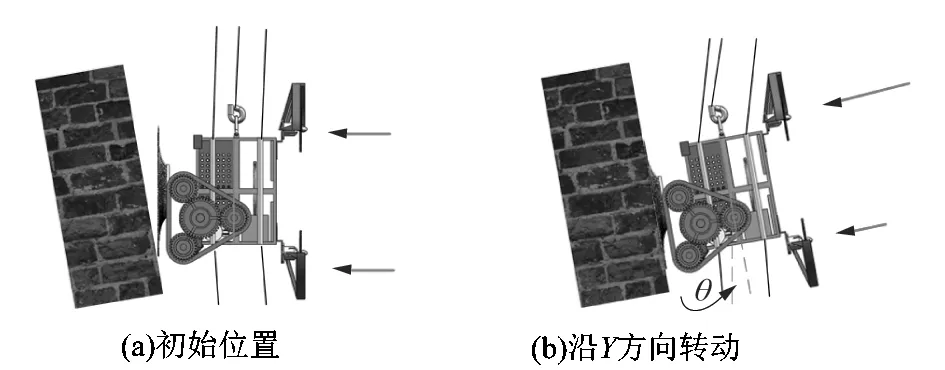
图7 机器人Y方向转动Figure 7 Rotation of robot in Y direction
3) 机器人绕Z方向转动自由度:通过同时增加机器人背部旋翼M1和M3或减小M2和M4的转速,可使机器人绕Z轴作正向旋转,反之,同时增加M2和M4或减小M1和M3的转速,可使机器人绕Z轴作反向旋转,即机器人的偏航运动如图8所示。
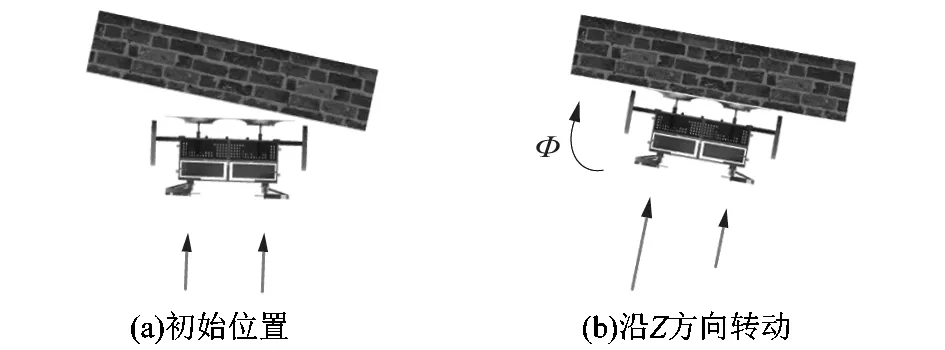
图8 机器人Z方向转动Figure 8 Rotation of robot in Z direction
4) 机器人绕X方向转动自由度:原则上通过减小某一旋翼的转速或某对角方向2个旋翼的转速使机器人产生反扭距可实现机器人绕X方向的转动,如图所示。但由于文中设计的立面三维可越障清洁机器人作业过程中不需要进行绕X方向的滚转运动,故可忽略不计,如图9所示。

图9 机器人X方向转动Figure 9 Rotation of robot in X direction
3 机器人越障研究
3.1 机器人越障策略
立面三维可越障清洁机器人要能获得实际应用,除了保证能在平坦的墙面上稳定行走外,还要能在非平坦路面上稳定行走,这也是立面三维可越障清洁机器人的一项关键技术[9]。关于非平坦墙面本研究只考虑有一定程度凸起形状障碍的情况。台阶作为一种典型的障碍物,其高度和宽度往往成为衡量机器人越障能力的重要参数[10]。课题组设计的机器人越障机制是基于超声波传感器和电调驱动的协调操作实现的,通过传感器检测障碍物后,旋翼作出相应减速调整越过障碍。但4旋翼无人机系统在越障过程中可能会有迟滞现象,导致机器人越障过程中尚未脱离障碍时已经与障碍接触。为确保越障时的可靠性,利用一种履带式行星轮机构代替机器与墙面发生硬接触,越障流程如图10所示。

图10 机器人越障阶段Figure 10 Obstacle-crossing stage of robot
1) 机器人平台沿壁面向下移动,前端4个超声波传感器检测墙面距离,根据4个传感器反馈的距离信号,背部4个旋翼分别调整转速以调整姿态使清洁装置稳定贴附于墙面上,同时机器人下端2个传感器检测障碍物。
2) 当下端传感器检测到距离障碍物0.3 m时,4旋翼减速并远离墙体。
3) 当障碍物脱离传感器检测范围时,4旋翼停止减速并维持该转速5 s,5 s后恢复调整转速使清洁装置稳定贴附于墙面上。
4) 平台继续向下移动,若平台未完全脱离墙面,则辅助越障机构先接触障碍。
5) 辅助越障机构做越障过渡,该过程中,仅辅助越障机构及盘刷刷毛接触障碍。
6) 当辅助越障机构越过障碍时,盘刷盘面接触障碍,平台继续下行,盘刷顺势向下滑动越过障碍。
7) 恢复上面步骤1),过程中,可能由于控制策略的误差导致平台姿态不稳,此时辅助越障机构优先接触墙面,行星轮系转动,起到防撞和维稳的作用。
8) 机器人平台完成越障。
图11描述了机器人系统检测障碍及其应对措施的总体过程。
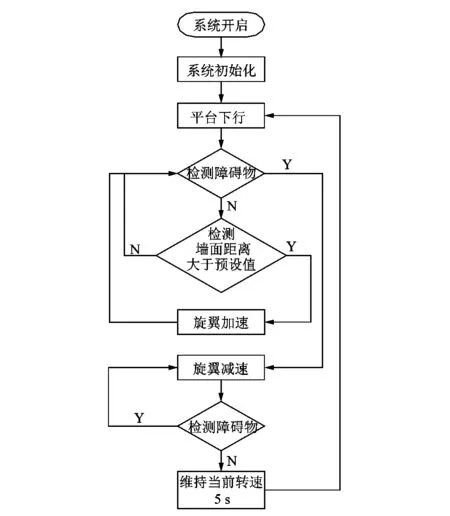
图11 机器人越障流程图Figure 11 Flow chart of obstacle-crossing mechanism
4 样机测试
本次实验设置工作对象为一栋高约50 m的玻璃幕墙建筑,越障实验如图12所示。

图12 样机越障过程Figure 12 Obstacle-crossing process of prototype
在本次实验中,凸台长度为10 cm,通过传感器测量机器人越障过程,处理后得到机器人在清洗越障过程中的Z及X方向位移曲线图13和14所示。
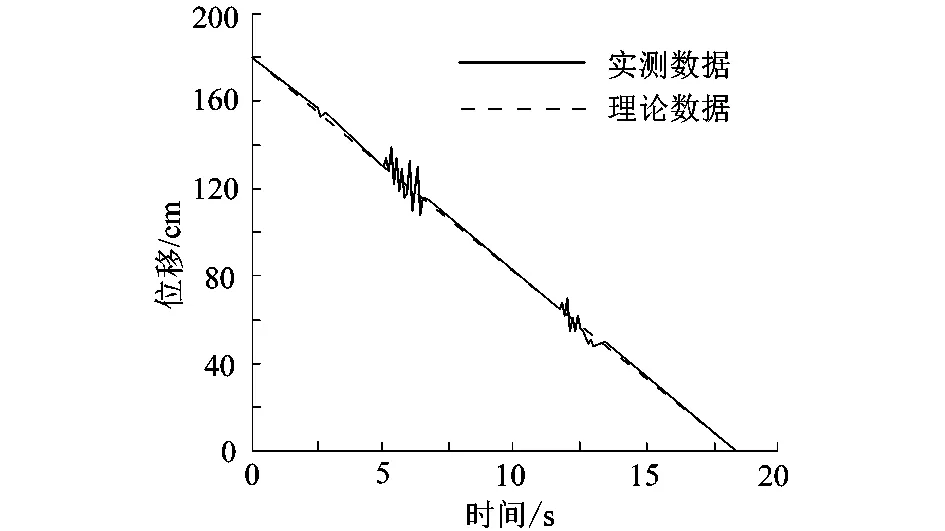
图13 Z方向位移Figure 13 Displacement in Z direction
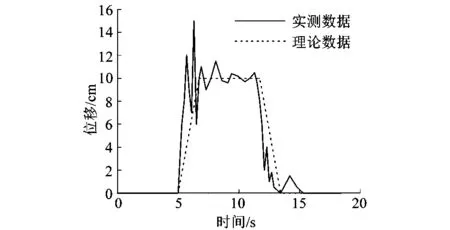
图14 X方向位移Figure 14 Displacement in X direction
分析可知,机器人越障时由于传感器和旋翼推力间存在响应延迟,在4旋翼无人机系统减速与加速时存在波动,但波动幅度较小,Z方向位移最大波动幅度约12 cm,X方向位移最大波动幅度约5 cm,与机器人尺寸相比波动极小,证明本研究的机器人可完成越障策略,且较平稳。
5 结语
课题组研究设计了一种灵活性高,对墙体表面属性依赖度不高的立面三维可越障清洁机器人,此机器人自由度为6,可以完成3个方向的移动和转动。在此基础上,设计了一种基于无人机技术的越障策略。通过样机实验,验证了该机器人运动与越障模式的可行性和平稳性,为立面运动机器人的研究提供了参考借鉴。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
民间故事选刊(2021年21期)2021-11-21
民间故事选刊·上(2021年11期)2021-11-20
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
作文评点报·中考版(2019年1期)2019-02-18
做人与处世(2018年14期)2018-08-10
