基于辅助变量最小二乘的无人艇模型辨识方法
2021-05-08 08:14胡常青赵京瑞孙雪娇李清洲唐军武
导航与控制 2021年1期
胡常青,赵京瑞,孙雪娇,李清洲,唐军武
(1.青岛海洋科学与技术试点国家实验室,青岛266237;2.北京航天控制仪器研究所,北京100039)
0 引言
无人水面艇(Unmanned Surface Vehicle,USV)运动数学模型是USV系统分析和设计的基础,高精度的数学模型不仅可以准确预报USV的运动状态,同时对设计自主控制器也有着重要的意义。在模型结构方面,目前已有分离型[1]、整体型[2]、响应型[3]、时间序列[4]等多种模型结构形式。为了辨识其中的参数,已经有多种系统辨识方法被提出,如最小二乘法、极大似然估计法、神经网络法、岭回归分析法和遗传算法等[5]。其中,最小二乘算法以计算简单、快速、准确性高、在线易辨识等优势被广泛使用。
陈霄等[6]针对辨识参数中的相消问题,提出了分布式最小二乘法,减少了辨识参数的相互抵消现象,但该算法并未考虑USV所受外部噪声对模型参数的影响,因而所辨识的参数仍会产生摄动。孙功武等[7]提出了一种动态遗忘因子递推的最小二乘方法,抑制了外部噪声对辨识参数精度的影响,但该方法解决的是大噪声下的模型参数摄动问题,对小干扰噪声的影响仍未解决。Zhu等[8]为提高最小二乘算法的鲁棒性,使用自适应最小二乘辨识方法,虽然提高了算法在多种环境下的适应性,但USV模型参数辨识时易受噪声的影响并未改善。为了提高辨识收敛速度,Xu等[9]使用最小二乘支持向量机方法提高了在线辨识速度与参数收敛速度,实验结果表明该算法在小噪声干扰下具有更快的收敛速度与收敛性,但该方法仅在流速缓慢的内河流域进行了证明,在复杂海洋环境下的适应性还未进行验证。
本文以USV的时间序列分析模型为辨识对象,考虑USV在海洋环境下实际运动中所受噪声为有色噪声的情况,提出了一种辅助变量最小二乘算法(Recursive Least Squares Algorithm with Auxiliary Variables,RIV)辨识模型参数,并与其他几种常用的最小二乘算法进行对比,通过仿真与多次实船实验验证了在有色噪声干扰下该辨识算法的有效性。
1 USV时间序列分析模型
根据野本谦作的研究,常用Nomoto模型的二阶线性方程为[10]

式(1)中,K为回转性指数,T1、T2、T3为应舵指数,r为USV的转艏角速度,δ为舵角,δ0为偏差舵角。由于转艏角速度、角加速度等信息量不易直接获取,且最小二乘法更适合辨识差分方程形式的模型,因此对式(1)采取后向差分处理,同时对转艏角速度等物理量进行积分处理,所对应的差分方程为

式(2)中,y(k)=ψ(k)-ψ(k-1),u(k-2)=δ(k-2),c=(b1+b2)δ0。利用方程转换法[10]将式(1)和式(2)做等价转换,得到如下等价关系

但是,分析式(2)可以看出,模型中并未加入噪声对模型输出的影响,所得到的估计值与实际值之间会存在由于噪声引起的偏差,影响辨识精度。在式(2)的基础上加入噪声量后,得到一种时间序列分析模型

式(4)中,ψ为实际航向角,δ为输入舵角,e为外部噪声,d为纯延迟步数,ai与bj分别为需要辨识的参数。因此,USV此时的航向角可由之前时刻的航向角与输入舵角直接计算得出。模型中的相关参数将直接影响模型预测的输出,因此如何准确获取其中的模型参数成为了准确构建该模型的关键。
2 辅助变量最小二乘算法
最小二乘算法通过寻找一组模型参数估计值,使各次测量的真实值与由估计参数所确定的模型输出之间误差的平方和最小。由于最小二乘算法的固有缺陷,当外部噪声为有色噪声时,最小二乘算法最终的计算结果是 “有偏的”,即参数辨识值偏离真值,这也将直接影响模型(式(4))的预测输出。此外,USV所受外部噪声无法被直接测量,更无法对噪声模型结构进行构造。因此,本文提出使用辅助变量对最小二乘算法进行改进,在不需要获取噪声量的前提下对USV的时间序列模型参数进行辨识,以期获得参数的无偏一致估计。


3 仿真验证
为了验证有色噪声对辨识参数的影响,同时对比辅助变量对最小二乘算法的改进,本文设计了如下仿真实验,设定需辨识的模型结构为

式(19)中的噪声模型为

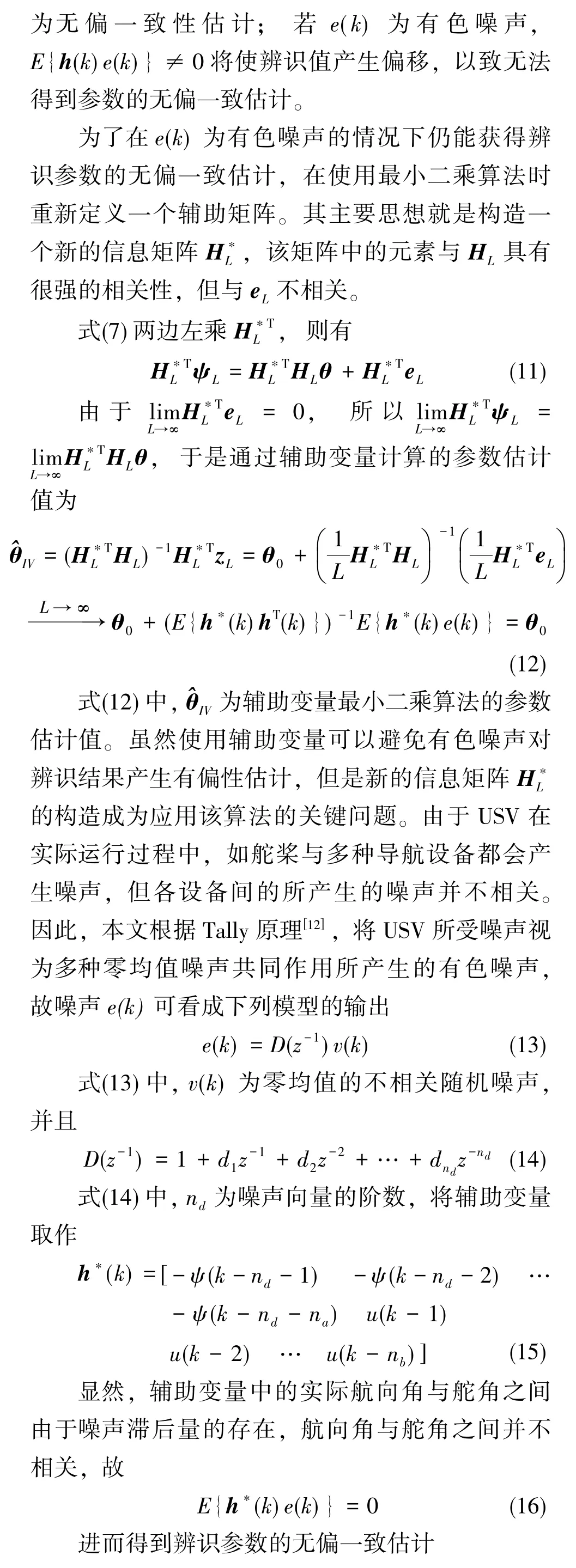
在设定辨识参数值时,参数值的变化主要影响最大超调量的大小,其最终过程一般都会收敛于所设定的参数值。因此,为了体现辨识参数的变化过程,本文选取小于2的模型参数进行辨识,具体参数设置为:a1=-1.5、a2=0.7、b1=1、b2=0.5、c1=0.5、c2=0.2,v为零均值的随机噪声,取计算次数为150次。仿真实验中,本文分别采用一次计算最小二乘算法(LS)、递推最小二乘算法(RLS)以及本文所提出的RIV算法,其仿真结果如图1所示。
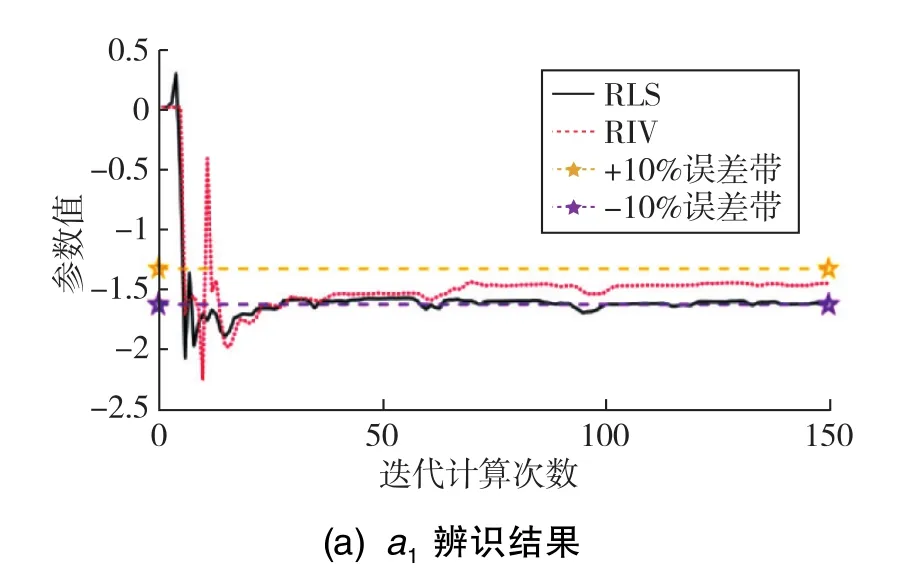
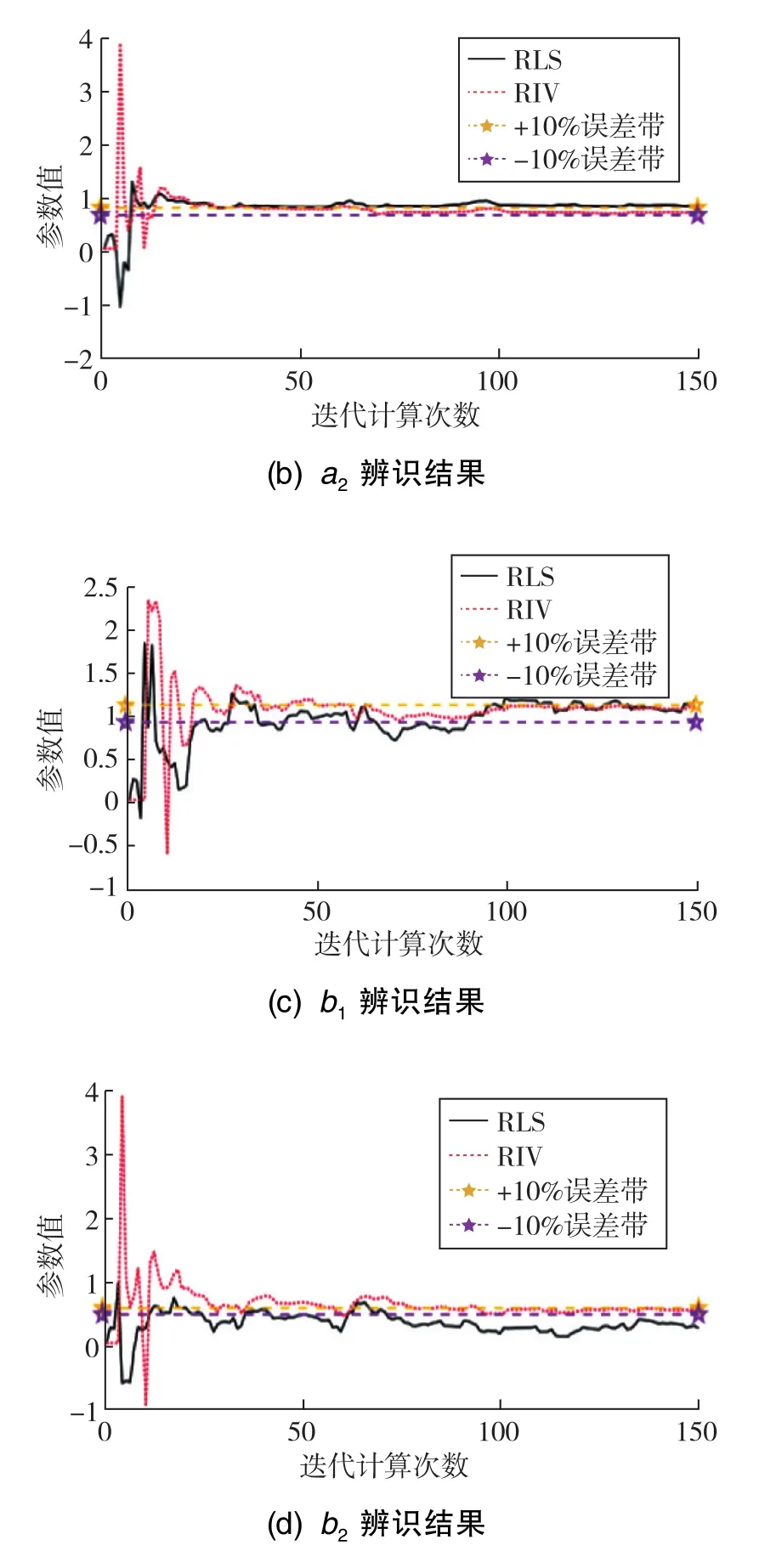
图1 辨识结果对比Fig.1 Comparison of identification results
由于LS属于一次计算方法,其参数辨识值仅通过一次计算得出,因而无法在图1中体现可获取到辨识值的计算变化过程。图1中,两条星型横线分别代表真实参数±10%的误差带,设定当辨识值进入到该误差带内并且此后参数变化一直在该误差带内,即视为参数辨识值辨识收敛,并将最后一次进入误差带的计算次数视为收敛次数。此外,为了衡量辨识算法的稳定性,本文使用均方根误差(RMS)对参数变化较为缓慢的第50~150次时的辨识偏差进行计算,最终计算结果如表1所示。
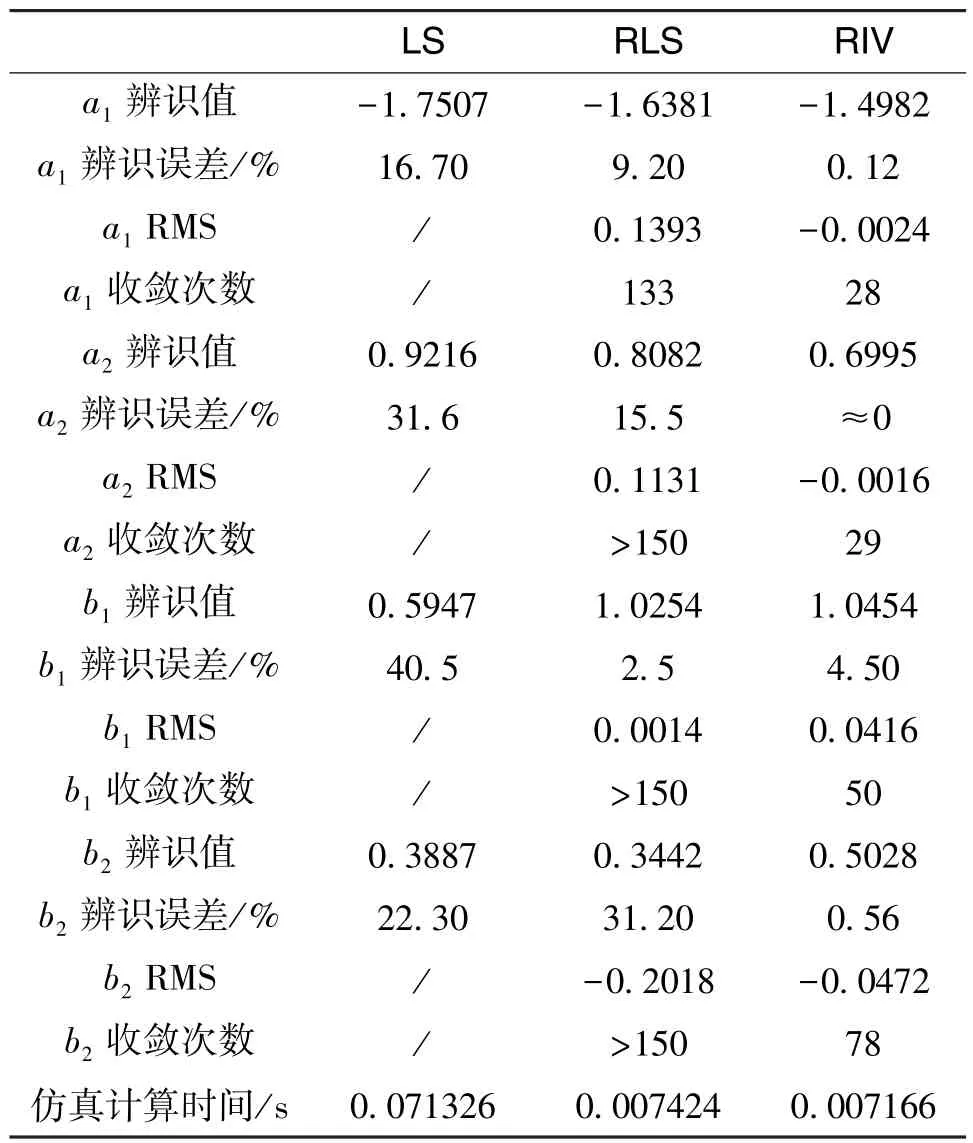
表1 辨识计算结果Table 1 Results of identification calculation
如表1所示,LS的最小辨识误差为16.7%(a1),而其余三个参数(a2、b1、b2)的辨识误差都在20%以上。与其他两种算法相比,LS的辨识结果较差。同时,由于该算法涉及到高维矩阵的求逆运算,故计算时间也相对较长。对比 RLS与RIV的计算结果,由于受到有色噪声的影响,RLS容易产生辨识值 “有偏”情况,同时对噪声干扰也更为敏感,导致RLS的辨识误差更大,最大误差可达31.2%。与之相比,RIV的最大辨识误差仅为4.5%,减小了有色噪声对辨识参数的影响。对比RLS和RIV的RMS值与收敛次数,并结合图1所示,有色噪声对RIV所辨识的参数影响更小,所辨识的参数基本在80次以内实现收敛。并且RLS与RIV的计算时间相差不大,但相比于LS,其计算时间已经有了很大提升。
综上所述,在仿真阶段,RIV可以在不考虑外部有色噪声模型的前提下快速、准确地完成模型参数的辨识,并完成辨识参数的一致性估计,具有一定的实用价值。
4 实验验证
在仿真分析的基础上,为了验证本文算法对USV时间序列模型的实际辨识效果,本文在威海某海域一级海况条件下进行了航行实验。在实验过程中保持USV以8kn航速匀速航行,航行轨迹为矩形,设定采样时间间隔为0.5s,采集运行时的舵角与航向角信息。根据式(3)的对应关系,设na=2、nb=2、nd=1、d=1。实验过程中,采用LS、RLS与RIV分别对模型参数进行辨识,辨识结果如图2所示。
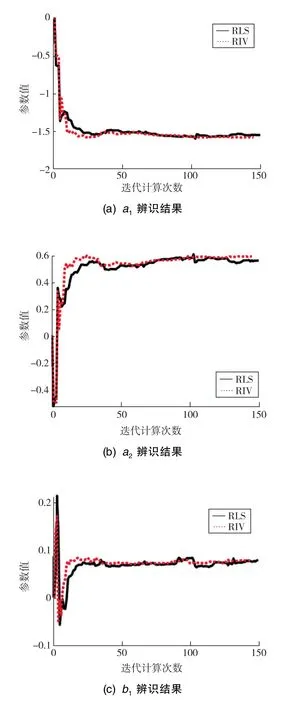

图2 实船实验辨识结果Fig.2 Identification results of real ship experiment
如图2所示,将RIV与RLS的辨识结果进行对比,可以发现在实际情况下,RIV可以更加快速、准确地到达参数收敛值附近,且整个过程的参数波动性更小,其详细计算数据如表2所示。
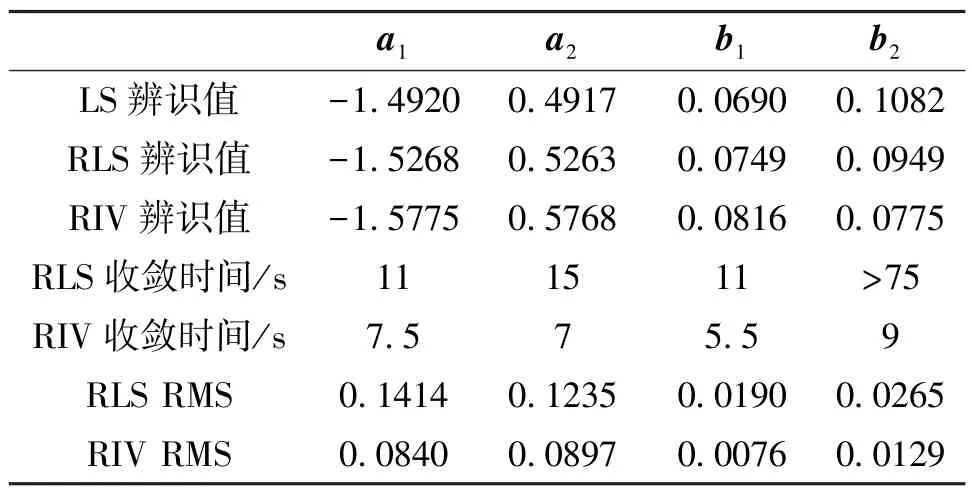
表2 参数辨识结果Table 2 Results of parameter identification
如表2所示,除LS辨识值是一次计算得来的以外,RLS与RIV的辨识值都是通过对第50~150次的辨识结果求和平均得来的,收敛时间则是根据第3章中10%误差带方法计算得出的。与RLS相比,RIV的辨识收敛时间减少约50%。而RLS所辨识的参数由于对噪声较为敏感,容易出现较大的抖动以致无法长时间收敛。在计算RMS时,误差值的来源是将第50~150次辨识结果与每一次的辨识值做差,代表着参数较稳定时噪声对辨识结果产生的影响。通过计算结果对比可以看出,在实际情况下,RIV对USV所受噪声干扰的敏感度更低,其参数收敛性更好。与RLS相比,其整体性能提高约一倍左右,实验结果符合第3章的仿真结果。
为了验证所辨识参数的有效性,本文将上述参数辨识结果添加到USV时间序列分析模型中,得到
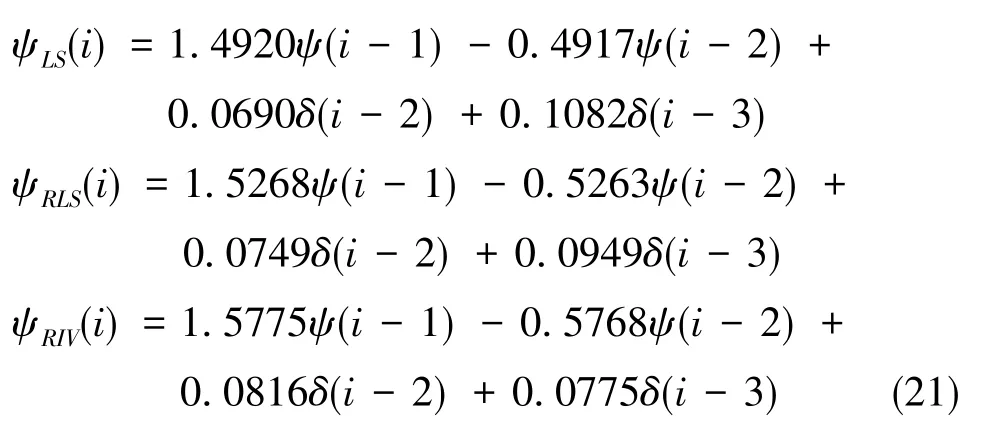
式(21)中,ψLS、ψRLS、ψRIV为由 USV 之前时刻真实舵角信息与航向信息计算得到的下一时刻的航向预报,ψ为每一时刻真实采集的航向角信息,δ为舵角信息。将USV保持8kn航速在同一海域、同一海况条件下进行Z型航迹跟踪实验并采集数据,采集频率为2Hz。将采集到的数据添加至式(21)中计算出每一时刻信息采集后下一时刻的航向角预报信息,并将预报信息与实际航向角做差,得到航向角的预报曲线与误差曲线,如图3所示。

图3 实际航向角预报曲线Fig.3 Prediction curves of actual heading angle
如图3(a)所示,LS、RLS与RIV所辨识的参数都可以较为准确地完成对航向角的预报。但在航向角预报误差方面,通过图3(b)所示,RIV辨识参数所构造的模型预报误差更小,预报准确性更高。通过计算三种算法预报航向角误差的RMS,LS、 RLS 和 RIV 分 别为 1.4314°、 1.3800°和0.8424°,证明了RIV的辨识结果在预报准确性方面有了较大提升,准确度提升约40%。
在实际海上航行时,USV可能会出现一段时间内无法获取实际定位信息的情况,即导航设备“失效”状况,进而导致USV无法及时准确获取自身航向状态以致控制 “失效”情况的发生。若模型可在一段时间内保持较高准确性的航向预报,则不仅对于USV控制,同时对USV自身安全也有一定的保障。对式(21)进行修改得到
式(22)中的大多数符号含义与式(21)中的保持一致,但与式(21)不同的是,USV下一时刻的航向预报是由上一时刻的航向预报计算得来的,即每次计算下一时刻航向角时不再使用真实导航数据的信息,舵角信息则继续使用实际采集值,最终的计算结果如图4所示。
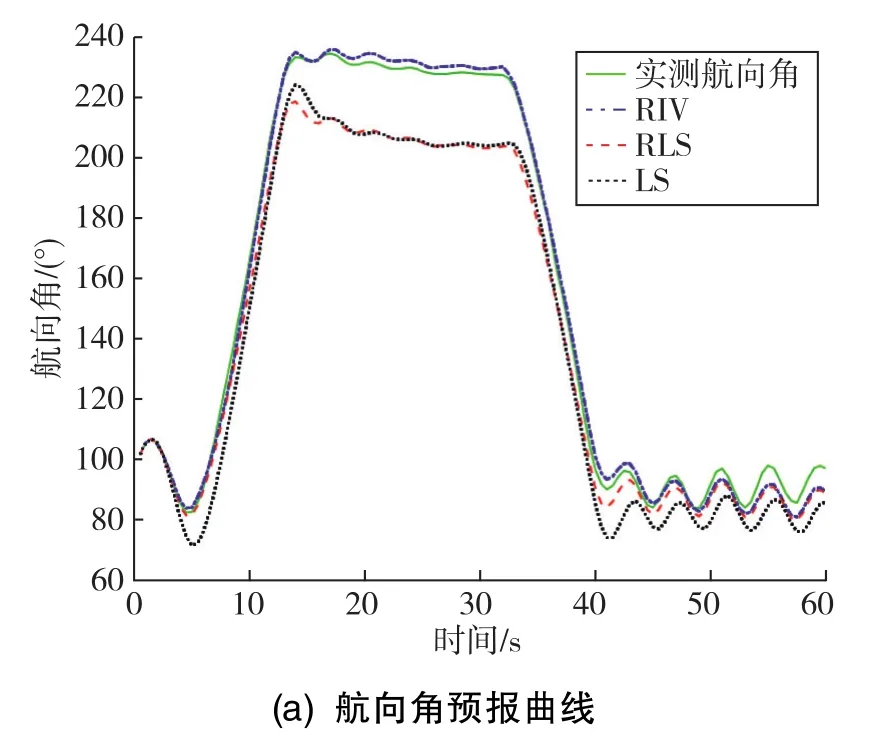

图4 航向角迭代预报曲线Fig.4 Iterative prediction curves of heading angle
如图4(a)所示,在5s内,三种辨识算法构造的模型所预报的航向角都较为准确,模型计算结果与实际航向角结果基本保持一致。但由于外部有色噪声对参数辨识结果产生的影响,导致LS与RLS所辨识的参数值与实际值之间会存在一定的偏差,以致该参数误差在迭代计算航向角时会出现误差累积问题,使5s后的模型预报结果开始产生较大的偏差,并在5s后有发散的现象。而RIV可减小外部有色噪声对辨识参数的影响,使辨识参数更为准确。因此,如图4(b)所示,RIV最终对航向角的迭代预报在50s内都在±6°的误差带内,准确预报时长提升了一个数量级。通过计算三种算法预报航向角误差的RMS,LS、RLS和RIV分别为 15.7977°、 14.4672°和 2.9827°, 航向角预报整体准确度也有了较大提升。
综上,实验证明了通过RIV所辨识的参数在对USV做出航向预报方面,无论是否存在外部信息修正,都可以在更长时间段内以更高的准确度预报USV下一时刻的航向角信息,也为USV保持自身控制提供了保障。
5 结论
本文通过对USV时间序列分析模型参数辨识方法的研究,提出使用了一种辅助变量递推最小二乘算法。根据Tally原理对辅助变量进行设计,并对算法的无偏一致性进行推导。通过对算法的理论推导和仿真对比,验证了RIV在不需要辨识噪声这一前提下对模型参数辨识的准确性和有效性,最后通过实船数据辨识了USV的模型参数。实验结果表明:采用RIV所辨识的参数相比一般最小二乘算法更加准确、有效,在实际应用方面具有一定的参考价值。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
现代仪器与医疗(2021年1期)2021-06-09
舰船科学技术(2021年12期)2021-03-29
当代陕西(2019年17期)2019-10-08
劳动保护(2019年3期)2019-05-16
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
师道(2018年6期)2018-07-16
饮食科学(2016年7期)2016-07-27