
侵彻弹药姿态测量技术研究现状及发展
2021-05-08 09:08廉璞,牟东,青泽,刘军
探测与控制学报 2021年2期
廉 璞,牟 东,青 泽,刘 军
(中国工程物理研究院电子工程研究所,四川 绵阳 621900)
0 引言
为打击深埋于地下的高价值目标,各国大力发展侵彻弹药技术,提高对坚固目标的打击能力。在侵彻过程中,弹体由于所受力的不对称,引起姿态变化,进而偏离初始弹道方向产生弹道偏转,影响侵彻的深度和威力,在恶劣的情况下甚至会出现弹体跳飞的现象。因此需要在侵彻弹药中增加弹体姿态测量装置,实时提供侵彻过程弹体姿态信息,为侵彻引信的起爆控制提供测量参考,增强侵彻引信的环境感知能力,更好地发挥侵彻弹药的作战效能。
目前,美军已经在宝石路(Paveway)IV型机载激光制导炸弹上增加MEMS惯性测量单元,实现姿态测量和层数识别,用于打击深埋加固后的高价值硬目标,也可打击建筑物多层目标。图1展示了宝石路IV型制导炸弹智能侵彻引信实物和内部模块安装情况。此外,美国已授权专利《侵彻测量设备》,该专利清晰地展示了其侵彻引信姿态测量的进展情况[1]。该测量设备利用惯性测量传感器(陀螺仪、加速度计)获得侵彻过程中的姿态变化信息,同时该设备也可以检测相邻层的变化,实现计层功能,并确定每一层的材料属性。总的来说,美军的侵彻姿态测量技术发展较为成熟,并且已经在工程中得到应用。而在国内方面,由于侵彻过程中过载变化大,工况十分恶劣,陀螺仪等传感器的生存性面临严峻考验,同时高冲击的条件造成惯性测量传感器的测量输出中夹杂着大量的噪声,难以提取到有效信号,诸多面临的技术难题造成国内侵彻弹药姿态测量技术方面的发展较为缓慢。本文针对此问题,对国外侵彻弹药姿态测量技术的研究进展进行综述。

图1 宝石路IV型制导炸弹智能侵彻引信外观及内部剖视图Fig.1 Appearance and internal cross-sectional view of the Paveway IV guided bomb intelligent penetration fuze
1 侵彻姿态偏转机理研究
侵彻姿态偏转机理的研究是实现侵彻过程弹体姿态测量的基础。研究表明,弹体的攻角、倾角、速度、弹体几何外形、靶的不对称、不均匀等因素均会影响侵彻姿态地偏转,因此掌握侵彻姿态偏转规律对于姿态测量、轨迹预测及侵彻威力判断等具有重要意义[2-5]。此外,姿态测量功能的实现也可进一步验证姿态偏转机理的研究。
侵彻姿态偏转问题研究涉及到多门学科,为了更加全面地掌握弹体侵彻过程姿态偏转情况,目前通常采用实验研究、理论分析、数值模拟三种方法,利用三种方法之间不同的特点,研究侵彻姿态偏转机理及弹道变化规律。
1.1 实验研究
实验研究是验证理论及仿真分析结果、获得物理量变化特点最直接有效的方式,本文的研究方法是基于大量的实验结果,根据实验数据建立侵彻特征物理量的经验公式。由于全尺寸弹侵彻实验的时间周期长、经济成本高,因此在实验研究时,通常采用缩比实验模拟,一般采用轻气炮、火炮、火箭撬等实验手段,通过X光拍摄方式研究弹在靶体中姿态变化、结构的动态响应等[6-7]。
美军装备研究发展中心弹道研究实验室开展了MK84斜侵彻混凝土实验研究[8],缩比率为1/15,着靶速度为150~270 m/s,倾角为20°~40°,实验研究发现,在着靶速度为228 m/s时,倾角达到25.7°出现跳飞现象。美国Sandia实验室进行了VAR 4340 刚体靶斜侵彻6061-T6511 铝靶的实验研究[9],分别以15°、30°、45°的倾角,553~1 184 m/s的速度开展实验。通过实验研究了侵彻弹道特性及跳飞现象,结果表明倾角的变化会影响侵彻弹药的姿态偏转。基于大量的实验数据分析,美军弹道研究实验室提出了BRL经验公式[10],美国陆军工程兵团提出ACE方程[11],Sandia实验室提出了Young经验公式[12-13],这些公式均为纯经验公式,对实验条件依赖度较高,缺乏普适性。文献[14—16]根据空腔膨胀理论,在对金属、混凝土、土壤等不同靶体侵彻实验的基础上,分析实验数据,确定侵彻计算公式中的各项系数,得到半经验公式。文献[17—19]在Forrestal的研究基础上,研究了刚性弹对不同靶体的侵彻过程,确定了刚性弹侵彻特征量的半经验公式。
实验研究方法简单,但是实验研究成本高,应用范围较窄,对不同实验条件的适用性较差。
1.2 理论分析
理论分析法是基于弹体运动学原理建立运动方程,再利用侵彻边界条件求解方程,从而得到弹体侵彻过程中侵彻特征量(速度、深度等)随时间变化的解析式。
目前的理论解析方法包括:含近似强度的修正伯努利方程(Alekseevskii-Tate 模型,AT模型)[20],球形或圆柱形空腔膨胀模型[21],基于能量守恒的一维模型[22],基于近似流场假设的模型[23],微分面力法[24-25]等。空腔膨胀模型是在研究刚体侵彻问题时学者们广泛使用的模型,该方法采用准静态本构模型对复杂的侵彻过程进行研究。研究初期,基于空腔膨胀理论,学者们主要针对球形弹头和卵形弹头的垂直侵彻过程进行理论分析;然而,实际侵彻过程多为斜侵彻,存在攻角和倾角,该情况下的理论分析分析难度将加大。针对这类侵彻过程,文献[26]对斜侵彻过程应用空腔膨胀理论进行了初步分析。文献[27]基于动态空腔膨胀理论提出刚性弹体斜侵彻混凝土靶的理论模型,并根据薄靶和厚靶的不同,将侵彻过程分为不同的阶段。文献[28]基于提出的三阶段理论模型,重新假设冲塞块形状,在弹体出靶的剪切冲塞阶段引入姿态二次偏转机制,建立弹体斜侵彻混凝土靶的姿态偏转理论模型。文献[29]基于动态空腔膨胀模型和刚体运动学理论,研究了卵形弹斜侵彻混凝土靶时的弹道偏转情况,并给出了倾角、速度和弹体头部形状分别对弹道偏转的影响规律。
理论分析法结果的准确性与模型建立的假设条件及合理的参数选择密切相关。在应用空腔膨胀理论模型分析时通常假设弹体为刚性,很大程度上简化了靶体模型,较适用于垂直侵彻。在斜侵彻过程中,对于靶体与弹体接触面非对称性对侵彻结果的研究仍需进一步完善。
1.3 数值模拟
数值模拟方法是利用计算机,求解质点物理方程和材料本构关系组成的描述侵彻过程的偏微分方程组。数值模拟法避免了理论解析分析时偏微分方程难以求解的问题,可以获得较完整的侵彻物理图像。目前在国际上模拟弹体侵彻问题应用较为广泛的有限元程序包括:LS-DYNA、MSC-DYTRAN及AUTODYN等。
数值模拟方法很大程度上受制于本构模型构建的准确性,目前使用最广泛的本构模型包括:RHT模型、HJC模型、TCK模型。其中,RHT模型[30]是一种考虑了压缩失效类的本构模型,该模型用于模拟脆性材料损伤,适用于对混凝土动态加载的模拟。HJC模型[31]将材料变形分为形状变形和体积变形,该模型同时考虑了压缩失效雷和塑性体积应变带来的失效,在混凝土侵彻问题研究中使用最为普遍。TCK模型[32]是一种考虑材料拉伸失效的本构模型,能够较好地模拟混凝土的动态断裂损伤。文献[33]基于HJC模型和TCK模型,建立了考虑拉伸损伤和压缩失效的混凝土本构模型,并应用LS-DYNA程序模拟了弹丸斜侵彻钢筋混凝土靶的过程。
此外数值模拟方法的可靠性与接触面的算法也密切相关。采用数值法模拟侵彻过程时,弹靶接触面会发生严重变形及剧烈运动,如何处理接触过程中的网格,准确表述接触界面是侵彻数值模拟中需要进一步解决的难题。
2 高过载陀螺失效机理及抗高过载MEMS陀螺研究
实现弹药姿态测量的自主测量方法主要包括:地磁传感器法[34]、加速度计法、陀螺仪法。但地磁传感器易受干扰,加速度计法对结构布局要求较高,因此针对侵彻弹药采用陀螺仪实现姿态测量。MEMS陀螺由于具有体积小、质量轻、可靠性高等特点,成为弹药姿态测量的主要传感器。但是,在弹药侵彻过程中,高过载的强冲击条件导致MEMS陀螺的性能发生显著变化,甚至可能出现失效的情况。因此需要针对高过载的动态环境,研究MEMS陀螺的性能变化及失效机理,并调研抗高过载MEMS陀螺发展现状。
2.1 MEMS陀螺性能变化及失效机理研究
侵彻高过载条件对MEMS陀螺的性能影响主要体现在两方面:一是惯性力的直接冲击,二是高过载产生的应力波对结构的破坏。从而导致MEMS陀螺在高过载环境中出现两种失效模式[36]:一是经过高过载后陀螺完全失效;二是高过载的动态环境导致陀螺性能退化,即陀螺的各项指标数(如零偏、标度因数、稳定性等)发生了变化,称之为功能性失效。
MEMS陀螺完全失效是指其结构完全损坏,输出的信号与角速率不相关,其产生的原因主要包括过载产生的应力超过陀螺材料的屈服强度极限引起的陀螺结构断裂[37-38],陀螺的微机构在高过载条件下发生贴合与黏附[39],高过载冲击下微粒污染引起的陀螺机构短路[40-41]以及层间脱落引发的失效[42]。图2所示为不同因素导致的陀螺完全失效。
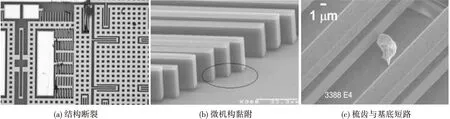
图2 MEMS陀螺完全失效Fig.2 MEMS gyroscope completely failed
MEMS陀螺功能性失效是指其结构未完全损坏,输出信号可以反映角速率信息,但陀螺的性能发生了变化,其产生的原因主要包括MEMS陀螺驱动机构、检测机构、支撑机构等发生受损引起的陀螺性能变化;因高过载巨大应力无法释放造成结构断裂引发的功能性失效[43]。
2.2 抗高过载MEMS陀螺
针对抗高过载的MEMS陀螺,目前的研究主要是从其失效机理出发,改进MEMS陀螺的设计,从而提高其抗高过载的能力。抗过载MEMS陀螺的设计思想主要体现在改变陀螺驱动-检测方式、改变工作模态、优化结构设计、采用新型材料等。
目前的MEMS陀螺大多采用梳齿电容式的驱动-检测方式,其在高过载条件下易发生结构断裂、贴合黏附等问题。针对该问题,英国BAE公司研制了采用电磁驱动方式的MEMS陀螺SiVSG,如图3所示。该陀螺在经历20 000g过载冲击后,零偏稳定性从85°/h退化至110°/h[44]。中北大学研发的MEMS陀螺采用电磁驱动和磁阻检测的方式,如图4所示,在仿真条件下可承受100 000g的驱动方向过载和70 000g的检测方向冲击[45-46],但其实际性能有待进一步研究。

图3 BAE公司研制的MEMS陀螺Fig.3 MEMS gyroscope developed by BAE
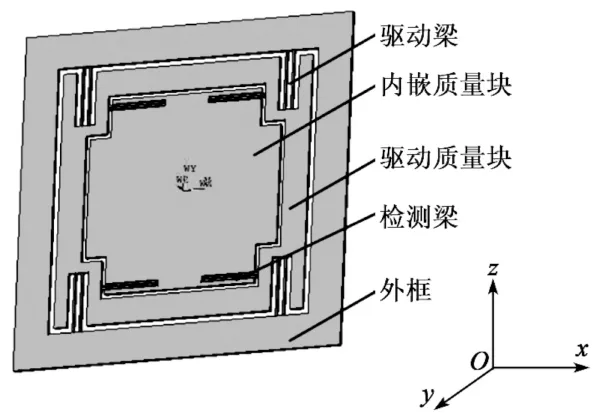
图4 中北大学研制的MEMS陀螺Fig.4 MEMS gyroscope developed by North University of China
目前多采用线振动模态的MEMS陀螺在高过载条件下易出现性能退化现象,而采用四波腹振型模态工作方式的陀螺,通过四波腹相位信息反映输入角度,相位信息对高过载冲击造成的线位移几乎不敏感。文献[47—48]通过采用四波腹振型模态提高MEMS陀螺的抗高过载性能。
通过改善传感器的结构设计可以提高MEMS陀螺的抗高过载性能。文献[49]设计了如图5所示的一种新型的折叠梁结构的MEMS陀螺,该陀螺在10 000g过载作用前后,结构无明显损坏。文献[50]优化了环形MEMS陀螺,优化后的结构如图6所示,该结构可承受11 000g的过载峰值。针对高过载引起的应力无法释放的问题,文献[51]在MEMS陀螺结构内设计了圆弧台阶的开槽结构,用来释放应力,如图7所示,结构优化后的MEMS陀螺抗高过载能力可达10 000g。

图5 折叠梁MEMS陀螺Fig.5 Folding beam MEMS gyrosco

图6 环形MEMS陀螺Fig.6 Ring MEMS gyroscop
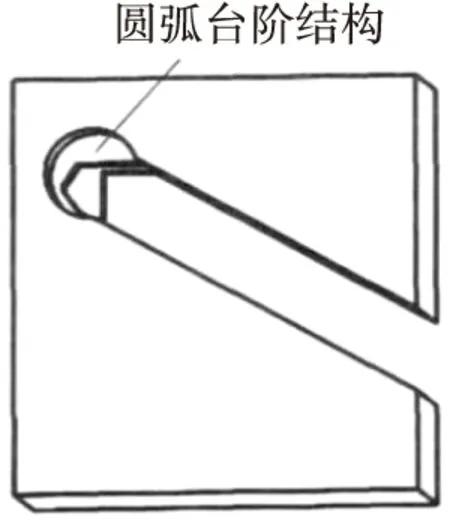
图7 圆弧台阶结构Fig.7 Arc step structure
对于MEMS陀螺材料的改进可以进一步提升其抗高过载冲击能力,研究表明,碳化硅的抗高过载性能要明显优于传统硅材料。美国加州大学伯克利分校研制了一款基于碳化硅材料的MEMS陀螺,在64 000g的过载冲击下,该MEMS陀螺的谐振频率无明显变化[52]。
综上,通过改进MEMS陀螺的设计可以提高其抗高过载能力,在MEMS陀螺满足抗高过载条件下,为进一步提高陀螺测量精度,需建立陀螺误差模型,抑制陀螺噪声的影响。
3 陀螺噪声抑制及校准技术
高过载侵彻条件下MEMS陀螺仪的漂移和噪声将对姿态测量结果产生严重影响,抑制MEMS陀螺噪声并对测量结果进行校准是实现侵彻姿态准确测量的关键。MEMS概念的提出者、美国著名物理学家Feynman曾指出,利用低精度惯性测量器件达到高精度的测量结果是MEMS技术的重要发展方向之一。借鉴该思想,美国《侵彻测量装置》专利[1]提出了陀螺阵列的方案,该方案中,通过在每个轴上安装8个陀螺仪来抵消噪声的影响,以获得更精确的输出值。
3.1 MEMS陀螺阵列技术
MEMS陀螺阵列技术是指利用多个MEMS陀螺测量同一角速率信号,并对每个陀螺输出的数据进行相关性分析及数据融合,得到陀螺输出角速率的最优估计,即实现更高精度的陀螺输出。其技术方案如图8所示[53]。
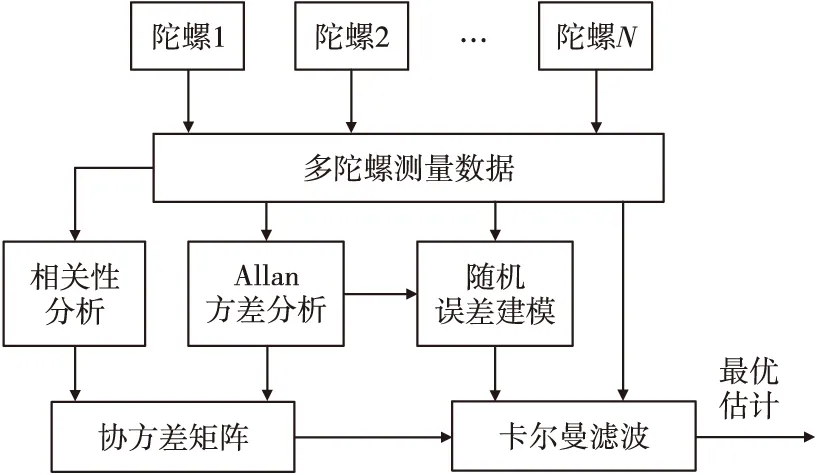
图8 MEMS陀螺阵列技术方案图Fig.8 MEMS gyroscope array technical scheme diagram
陀螺阵列技术最早在2003年由美国国家航天局下属的喷气推进实验室(JPL)的Bayard等人提出[54],其目的是利用多个低成本的陀螺仪得到优化的角速率输出信号,他们将4个漂移为8.660 4 (°)/h的陀螺连续运行111 h,经过卡尔曼滤波估计后,陀螺漂移减小到0.062 335 (°)/h,性能提高了173倍,美国内华达大学、密歇根大学、罗德岛大学等高校及一些科研机构对陀螺阵列技术开展大量的研究工作,通过对陀螺阵列的建模,探索阵列之间的相关性,并研究了不同的融合算法来提高测量精度[55-57]。美国Tanenhaus and Associates 公司研发了由24个MEMS陀螺和6个加速度计组成的惯导产品,如图9所示,该产品5 h的角度漂移优于0.03°[58]。此外,印度PES理工学院、瑞典皇家理工学院均对陀螺阵列技术开展研究,设计了不同构型的陀螺阵列,并研究了滤波融合方法[59-60]。
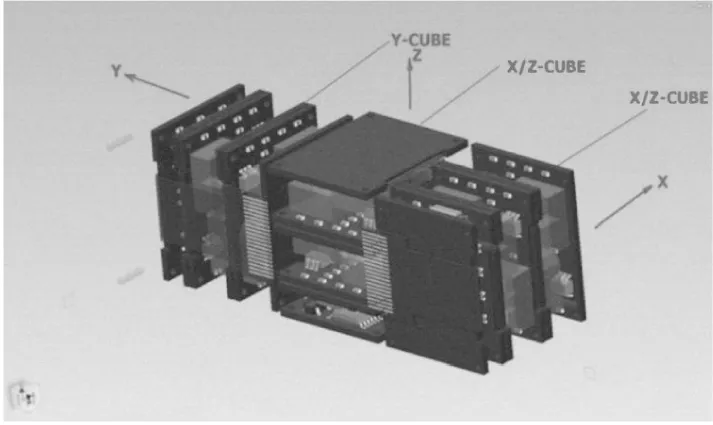
图9 陀螺阵列构成的惯导产品Fig.9 Inertial navigation products composed of gyro array
国内方面,西北工业大学最先开始研究MEMS陀螺阵列技术,文献[61]中提出了基于阵列技术的MEMS虚拟陀螺系统,并采用卡尔曼滤波算法设计了虚拟陀螺的最优估计,将三个零偏稳定性为35 (°)/h的陀螺性能提升至0.15 (°)/h。此后,哈尔滨工业大学、东南大学、火箭军工程大学等高校的科研人员均对MEMS陀螺阵列技术开展研究[62-68],其研究主要包括:陀螺阵列的配置、多陀螺相关性分析、融合补偿算法设计、故障检测及隔离技术等。其中,融合补偿算法的优劣对提升陀螺阵列性能起到关键的作用。本文主要介绍融合补偿算法的研究现状。
3.2 融合补偿算法
融合补偿算法是MEMS陀螺阵列技术的核心,其思想是利用多陀螺之间相关性建立的陀螺误差模型,滤波估计真实角速度,降低陀螺随机误差的影响。针对融合补偿算法,学者们的主要研究目标是降低算法复杂度、提升容错性能、提高融合精度。
目前,MEMS陀螺阵列融合算法使用最为广泛的是卡尔曼滤波算法[59,61,63,65]。以卡尔曼滤波为基础,文献[53]提出了一阶自回归的卡尔曼滤波融合算法模型,抑制陀螺随机误差的影响。文献[66]利用系统完全随机可控和可观的特点,改进了卡尔曼滤波算法,利用增益的稳态值估计角速度,减小了多陀螺阵列的数据处理运算量。为进一步提高多陀螺的滤波融合精度,文献[69]针对陀螺阵列提出了二级滤波的模式,在一级滤波中采用传统的多陀螺卡尔曼滤波,二级滤波引入磁传感器和加速度计的测量值,建立二级卡尔曼滤波模型。两级滤波分别将零漂为35 (°)/h的陀螺降低为1.07 (°)/h和0.53 (°)/h。此外,文献[70—71]针对多陀螺阵列融合算法,开展了相关系数研究、滤波增益分析等工作。文献[72]也采用了两级滤波结构,首先利用Allan方法分析法研究多个陀螺的误差信号,建立随机漂移的误差模型,然后设计了卡尔曼滤波和角速度跟踪滤波的两级动态滤波结构,得到精度更高的角速度输出信号。
针对卡尔曼滤波算法对噪声参数依赖性太高的问题,文献[73]提出了基于H∞滤波算法,提高MEMS陀螺阵列对外界环境的适应性。文献[56]将阵列陀螺滤波问题看做隐马尔可夫模型,其中角速度的真值为隐状态,各个陀螺仪的测量值为观测矢量,并通过引入非线性运动模型降低角速度误差。
在实际应用中,陀螺阵列采用的敏感器增多,不可避免会出现故障,从而影响整体的系统性能。为此,需要在现有研究的基础上增加故障诊断与隔离技术,提高整个系统的可靠性。此外,目前针对MEMS陀螺阵列的测试多在静止环境或转台上完成,缺乏高动态的测试试验,因此需要研究侵彻高动态环境下MEMS陀螺阵列性能的变化,在算法上抑制陀螺噪声,提高陀螺测量精度。
4 快速姿态解算及补偿算法
在高动态的侵彻环境中,利用陀螺仪输出进行姿态解算时会产生不可交换误差,即圆锥误差。圆锥误差的增大将极大影响姿态解算的准确性,从而对侵彻过程中弹体姿态及轨迹的预测和判断产生影响。因此,在高动态的测量环境下,对圆锥误差的补偿和完成姿态的快速解算是提高惯导姿态解算精度,实现侵彻快速姿态测量的关键。
通常情况下,圆锥误差是由于载体的高转速和锥运动而产生的姿态误差[74-75]。对于侵彻过程,高过载的强冲击条件会导致陀螺陀螺性能发生变化,从而引起姿态误差;此外,侵彻过程历时较短,需要陀螺仪具备高采样率,其势必会引起陀螺噪声,导致姿态解算误差,学者们将陀螺性能变化及高频采样造成的姿态误差等效为圆锥误差[76]。针对圆锥误差的影响,学者们利用Bortz提出的等效旋转矢量的概念[77]优化姿态解算方法,文献[78—79]采用双速旋转矢量方法完成导航中的姿态解算,其中对圆锥误差进行高频解算,对旋转矢量进行低频更新。Ignagni的研究表明随着子样数的增多,姿态精度随之提高,但是子样数的增加会带来解算速度的减慢。文献[80]提出了不依赖角增量的圆锥误差改进算法以提高补偿的速度,同时通过细化补偿间隔降低姿态误差。
在高速侵彻条件下,为敏感到侵彻极短时间内的姿态变化,需要陀螺仪具有较宽的频率响应,而带宽的增大随之会带来圆锥误差。针对陀螺高频采样引起的圆锥误差,文献[81]提出了调频圆锥算法,通过改变等效旋转矢量中多子样的系数,降低圆锥误差的影响。高冲击的侵彻环境会引起陀螺仪的振动,因此在测得的角速度信号中包含有振动信号,其同样可认为是圆锥误差。为此,文献[82]通过优化圆锥误差参数,降低陀螺中振动引起的随机信号的影响,其中圆锥误差补偿系数通过最小二乘法获得。在此基础上,进一步优化圆锥算法[83],实现具有随机离散特性的圆锥误差补偿。文献[84]研究了一种无压缩式的多子样圆锥算法,提升了圆锥误差算法在操纵条件下的性能。
现阶段陀螺仪在高过载条件下性能受到严重影响,甚至失效,陀螺仪面临严峻的生存性问题,对其信号变化特性及姿态解算的研究更是少之又少。因此,首先应解决陀螺仪在高过载冲击条件下的生存性问题,其次需要对陀螺输出信号进行时域特性分析,研究新的姿态解算方法,消除圆锥误差的影响,减小算法延迟,满足实时解算的要求。
5 结论及展望
未来复杂化、多样化的战场环境对侵彻弹药的作战效能提出了更高的要求,为了确保引信能够在适当位置及合适的角度引爆战斗部,并防止跳弹现象带来的不必要损失,需要实现侵彻过程的快速姿态测量。通过梳理侵彻姿态测量关键技术的研究进展,可以看出侵彻姿态测量技术的实现面临侵彻姿态偏转机理认识不充分,陀螺抗高过载冲击性能差,陀螺噪声抑制及姿态实时解算在高动态环境下的研究缺乏等诸多问题。因此未来应重点开展以下几方面的工作:
1) 建立准确描述侵彻弹靶接触面的动力学模型,研究侵彻姿态偏转的变化规律,为姿态测量、轨迹预测提供理论依据。通过姿态测量技术的实现进一步推动侵彻姿态偏转规律的研究。
2) 针对高过载条件下MEMS陀螺的失效机理,改进MEMS陀螺的结构、材料、工作模态等设计,研制可以抗高过载冲击的MEMS陀螺。
3) 从软件算法方向进一步提高MEMS陀螺的测量精度,可通过陀螺阵列排布、误差模型修正、圆锥误差抑制等方面降低陀螺性能变化及测量噪声带来的误差,提高姿态解算的精度。
随着理论认知和工业技术的日趋成熟,将能够克服当前存在的诸多问题,并逐步实现高过载冲击条件下的侵彻弹药姿态测量,提高侵彻引信的环境感知能力,推动侵彻弹药技术的发展。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
小猕猴智力画刊(2022年4期)2022-05-23
小学生学习指导·高年级(2021年6期)2021-09-10
创新作文(1-2年级)(2017年5期)2017-12-07
故事作文·高年级(2016年6期)2016-06-21
初中生世界·九年级(2016年6期)2016-05-27
诗选刊(2015年4期)2015-10-26
电影新作(2014年5期)2014-02-27
早期教育(美术教育)(2010年4期)2010-04-13
阅读(中年级)(2009年11期)2009-04-14
