陆空两用无人小车的设计及分析
2021-05-16 10:33王晓东任俊楠冒亚萍
科学技术创新 2021年13期
王晓东 任俊楠 冒亚萍 孙 杨
(南通理工学院 汽车工程学院,江苏 南通226000)
1 概述
随着人们对各领域的探索和开发,无人机和无人小车的应用越来越广泛,同时其各自弊端愈发明显。无人机续航时间短、负载能力差、环境适应性差,无人小车移动速度慢、受地形影响较多,单独个体不能很好的满足人们多元化的需求。许多国家已开始进行陆空两用无人小车的研究[1]。常见的陆空两用小车是将飞行系统和陆地系统分开布置设计,即螺旋桨与车轮为非同轴式结构,这导致小车结构的冗杂、控制系统的复杂以及故障率的增加,降低了整车工作效率[2]。鉴于此,本文设计了一款陆空两用无人小车,将螺旋桨与车轮在结构上有效结合,配合油电混合动力系统,使之不仅具备多旋翼无人机的高通过性和灵活性,也具备轮式地面无人车的长续航优势,能够更好的应对各种不良工作环境。
2 工作原理分析
2.1 地面行驶原理
如图1 所示为陆地行驶模式下的小车简图。其螺旋桨桨面通过翻转机构旋转至与地面垂直状态,通过接合套改变齿轮接合形式,实现前后轴旋向相同,可共同驱动小车前进。每个半轴都安装一个盘式制动器,在行驶过程中可起到转弯与制动的效果。
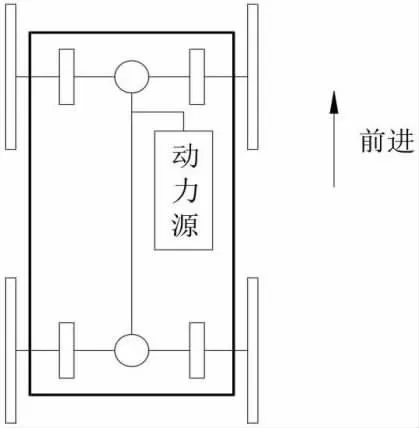
图1 陆地行驶状态简图
左侧两制动器夹紧,可限制或制止左侧车轮转动,同时由于差速器的作用,右侧车轮加速旋转,达到向左转向或原地左转的效果。同样的,右侧制动器加紧,可向右转向或原地右转。行驶时所有制动器动时加紧可起到紧急制动的效果。
2.2 空中飞行原理
如图2 所示为空中飞行模式下的小车简图。螺旋桨桨面通过翻转机构旋转至水平位置,通过接合套改变齿轮接合形式,实现前后轴旋向相反。而由于翻转机构的作用,同轴的桨叶旋向相反,故同侧桨叶旋向也相反,对角桨叶旋向相同,桨叶高速旋转产生的自转力矩可以相互抵消。而通过四个半轴制动器配合作用,可实现飞行时不同的运动方式。
俯仰运动:令前轴两个半轴制动器轻微夹紧,如图2,即1桨和2 桨的半轴制动器夹紧,可使前轴升力略微小于后轴,车身向前小幅度翻滚,因而车身可加速向前飞行。同理,后轴半轴制动器轻微夹紧,可使车身向前飞行时减速,或空中静止后向后加速。
横滚运动:与俯仰运动相似,令车身左侧两个半轴制动器轻微夹紧,即1 桨和3 桨半轴制动器夹紧,可使左侧升力小于右侧,车身小幅度向左翻滚,因而车身可向左加速飞行。同理,右侧半轴制动器夹紧,可使车身向右加速飞行。
偏航运动:令对角两个半轴制动器轻微夹紧,如1 桨和4 桨的半轴制动器轻微夹紧,四桨的转速差会形成力矩差,使车身按顺时针方向旋转。同理,使2 桨和4 桨的半轴制动器轻微夹紧,车身会逆时针旋转。
3 主要部件的选型
3.1 发动机的选型
发动机是陆空两用无人小车动力装置的核心设备,不仅作为动力源直接输出动力,还可以带动发电机运转,将机械能转化为电能给电动机提供能量及电池充电,合理的选型决定了无人小车的各类性能和对环境的适应能力。
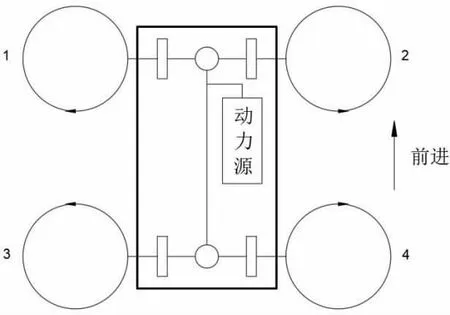
图2 空中飞行状态简图
目前,无人机常用的发动机主要有活塞式和喷气式两大类。活塞式发动机有较长远的发展历史且技术发展较为成熟,而喷气式发动机凭借其优异的推重比和高转速时的燃油经济性迅速取代后者,成为航空发动机的主流。但对于喷气式发动机而言,功率越小,其可靠性和燃油经济性就越差,鉴于本设计为小型无人车,综合考虑选用活塞式发动机[3]。
3.1.1 发动机的基本要求
3.1.1.1 比功率大。陆空两用无人小车不仅满足陆地行驶基本功能,还具有空中飞行的功能,因为空中飞行对飞行器的重量有较高要求,因此作为重要部件,要求发动机有较高的功率质量比。在满足最大功率的情况下保证机体轻量化以确保无人车能够平稳、可控、持续地飞行。
3.1.1.2 能耗小。即有较好的燃油经济性,节能减排的同时,相同的油箱容积下一定意义上提高了小车的续航能力。
3.1.1.3 安全可靠。为了维持无人车在空中飞行时的安全性,发动机必须有较好的安全可靠性,描述发动机可靠性的参数是:空中停车率=发动机空中故障次数/飞行时长。
3.1.1.4 维护方便。有效减小后期小车维护成本。
3.1.2 具体型号的选择
综合考虑无人小车的自身重量、负载能力、续航能力、具体尺寸及使用环境等,选择一款现有的水平对置、双缸两冲程汽油机DLE120,具体参数见表1。
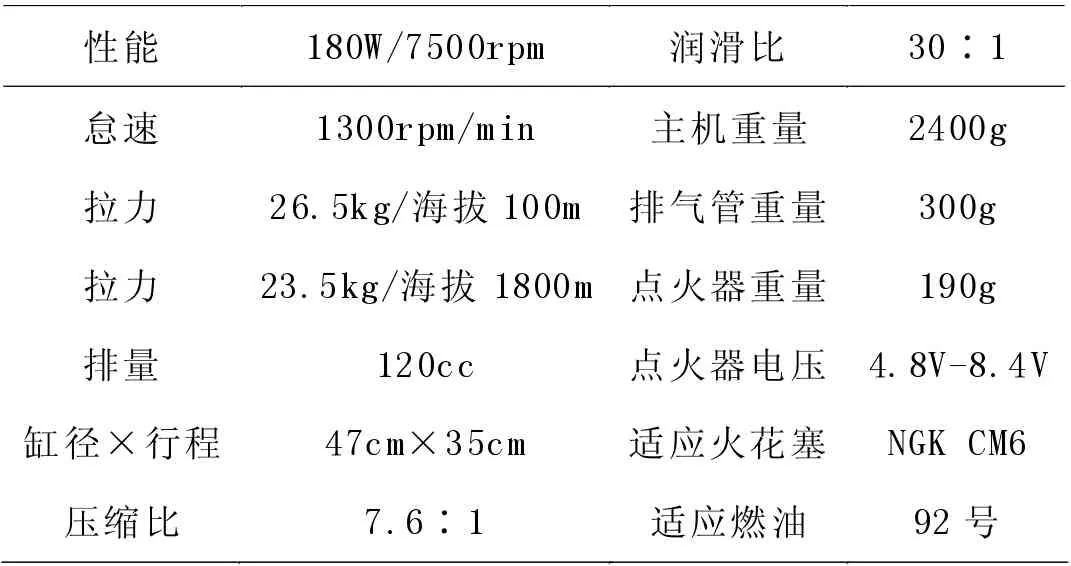
表1 发动机DLE120 具体参数
3.2 电动机的选型
陆空两用无人小车在工作的过程中,因负载和工况的改变会经常性地起动/停车、加速/减速等,而且会面临高寒、低氧的恶劣环境。因此要求相比于一般的工业性电动机有更高的性能要求,基本要求如下:
(1)电动机应具有瞬时功率大、超负载起动性好、加速能力强、使用寿命长的特点。
(2)电动机应体积小、质量轻、有较高的功率质量比。.
(3)电动机应有较好的可靠性,能够适应各种恶劣环境,如高寒、低氧等。
(4)电动机应运行时噪声低,减少污染。
一般小型无人车所用电动机均为直流电动机,直流电动机根据换相方式的不同分为有刷和无刷直流电动机。有刷直流电动机采用机械结构换相,因存在机械摩擦所以有较大的工作噪声,且换相容易产生火花。而无刷直流电动机采用电子换相的方法有效弥补了有刷直流电动机的相应缺点,且无刷直流电动机更是具有易于调速、起动转矩大、可靠性高、功率质量比大和转矩特性优异等优点[4]。综合考虑本设计采选用无刷直流电动机。
3.3 电池的选型
无人小车电池选用需考虑的因素:
(1)输出电流大于电动机最大电流,且持续输出电流大于电调最大持续输出电流。
(2)有较好的比能量和比功率,满足小车轻量化需求。
(3)绿色环保,无污染,可再次利用。
(4)循环寿命长。
表2 为三种常见的动力蓄电池性能的对比。
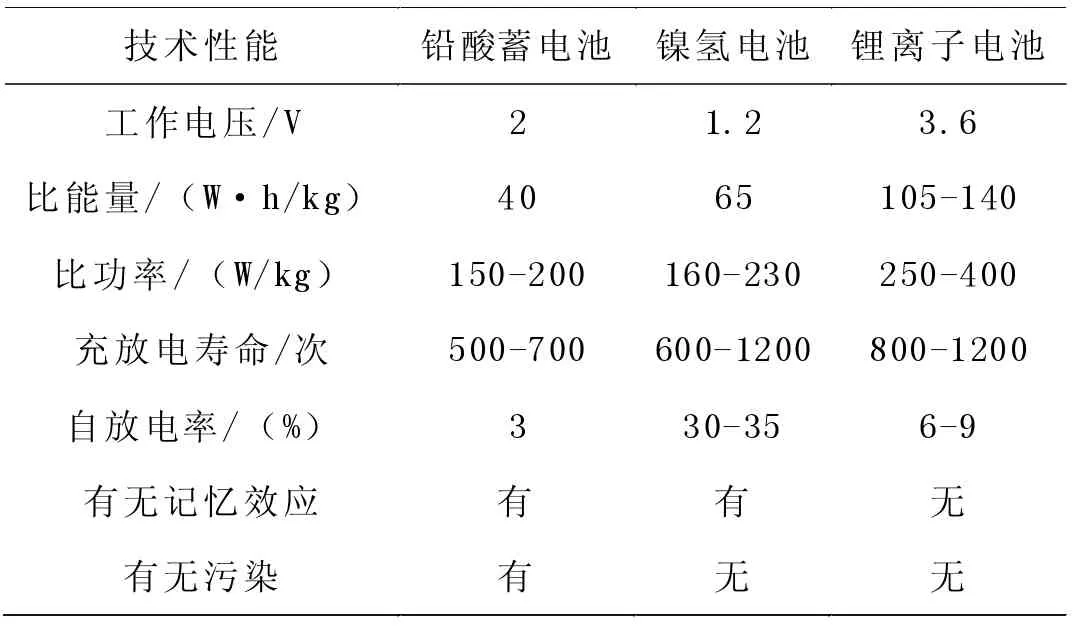
表2 三种动力蓄电池的技术性能
通过对比发现,锂离子电池比功率、比能量较高,有助于提高小车的动力性及续驶里程,同时自放电率低、寿命长等都具有优势,再综合考虑无人小车工作环境因素及要求,最终选择锂离子电池。
4 陆空两用无人小车主体结构设计
4.1 主体结构
图3 为陆空两用无人小车机械机构示意图。其中原动机包括发动机12 和电动机10,发动机12 通过动力系统与电动机10相连,并可以单独或与电动机共同输出转矩与转速。动力系统还包括盘式制动器11、公共太阳轮9 和行星齿轮组8 等。原动机输出的动力经由皮带传动装置7 传递到传动轴6,传动轴6前后两端各存在一个驱动桥。前桥动力由主减速器5 输入,经由差速器4 传递向左右半轴。后桥动力由后主减速器输入,经由扭矩换向差速器1 总成传递至左右半轴。最终,动力经过翻转机构总成3 由轮毂螺旋桨一体化机构2 转化为飞行时的拉力或行走时的驱动力。
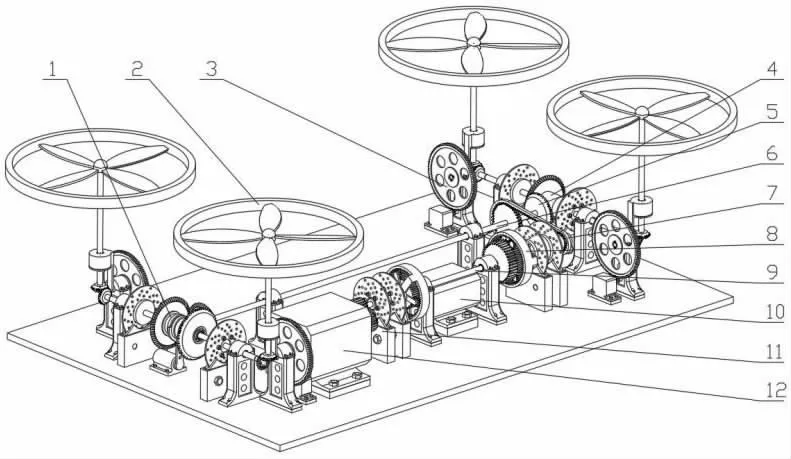
图3 陆空小车机械机构
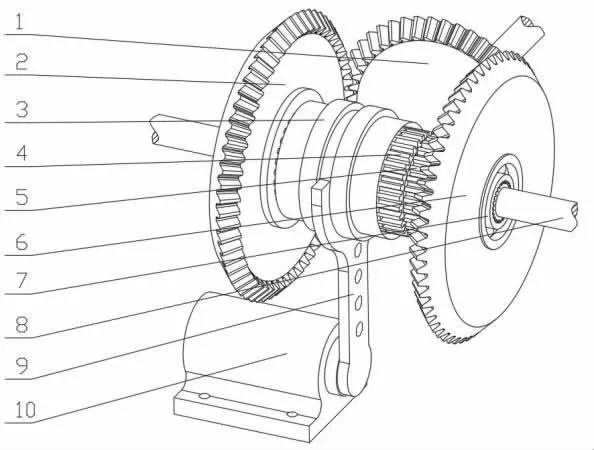
图4 扭矩换向- 差速器总成
4.2 扭矩换向- 差速器结构
如图4 为扭矩换向- 差速器总成。其中主减速器的结构为单级直尺锥齿轮,且后轴主减速器两个从动锥齿轮2 和6 为左右对称布置,从动锥齿轮与主动锥齿轮1 同时啮合,在运转过程中转向相反。从动锥齿轮2 通过轴承7 固定在半轴上,除了通过接合齿圈5 与接合套3 连接外,与总成其它部件没有动力传递。即动力经主动锥齿轮1 传递至从动锥齿轮2,再由其中一个从动锥齿轮2 通过接合齿圈5 与接合套3 连接,将动力经结合套3 传递至差速器外壳4。最终,动力由差速器向左右半轴8输出。
接合套3 由拨叉9 和活塞缸10 控制,可左右轴向移动。如图4 所示,接合套3 移至左端后,与左从动齿轮2的接合齿圈5 和差速器外壳4 同时连接并传递动力。此时前后驱动桥半轴的转向相反,进一步使螺旋桨在提供升力的同时,抵消高速旋转时产生的扭矩。
5 结论
本文设计了一款新型陆空两用无人小车,分析了地面行驶和空中飞行两种工作模式的实现原理,并阐述两种模式下小车运动姿态的调整方式。综合考虑无人小车的性能要求及对环境的适应能力,通过对比不同的发动机、电动机及电池,最终确定了型号为DLE120 的水平对置式双缸二冲程汽油机,同时采用无刷直流电动机配合发动机为无人小车提供动力,实现混合动力的目的,电池方面则选用性能较好的锂离子电池以满足工作时长的要求。其后,对整体结构及工作原理进行了阐述,并对扭矩换向差速器总成的结构和运作方式进行了着重说明。整体设计方案具有较高的可行性及可靠性,同时可为后续试验机的开发提供了重要依据。
猜你喜欢
水上消防(2022年1期)2022-11-20
汽车零部件(2021年11期)2021-11-29
智能制造(2021年4期)2021-11-04
军民两用技术与产品(2021年7期)2021-10-13
汽车实用技术(2021年14期)2021-08-05
军民两用技术与产品(2021年12期)2021-03-09
汽车维修与保养(2019年7期)2020-01-06
汽车实用技术(2019年1期)2019-10-21
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28