机场多普勒激光雷达风切变探测与识别
2021-05-19 02:43张曦张建军丁媛媛刘晓英何志强
气象科技 2021年2期
张曦 张建军 丁媛媛 刘晓英 何志强
(1 民航华北空管局,北京 100621; 2 中国海洋大学,青岛 266100)
引言
风切变是一种大气现象,即风矢量(风向、风速)在空中水平和(或)垂直距离上的变化。产生风切变的原因主要有2大类,一类是大气运动本身的变化所造成的;另一类则是地理、环境因素所造成的,有时是两者综合而成。风切变对民航飞机起飞和进场着陆的危害已为国际航空和气象学界所公认。据不完全统计,1970—1985年的15年间,在国际定期和不定期航班以及其他飞行任务中,至少发生与风切变有关的飞行事故28起,死亡人数近700人,受伤人数近300人。
据统计,2013年首都国际机场仅因受到西跑道风切变影响而复飞的飞行架次为33架次,因风切变而中止进近的飞行架次为28架次,2架次因为风切变而中断起飞;同样在2014年因风切变影响而复飞、中止进近的架次分别为26架次、27架次,由此可见西跑道风切变对飞行的严重影响。近年来首都国际机场高峰时段在一分钟的时间内有将近两架次的飞机起降,在如此密集的起降里,遭遇风切变的概率也大大增加。
然而,目前首都国际机场配备的测风手段如:风杆、双偏振多普勒天气雷达、风廓线雷达等,仍不能直接有效地探测飞机起飞下降区域(起飞区域为从地面至500 m高度的范围;下降区域为从500 m高度至地面,与跑道成3°夹角的空间范围)内的三维风场,也不能有效探测机场边界层晴空条件下的风场情况。因此,民航局空管办成立了安全能力建设项目《基于相干多普勒激光雷达的首都机场西跑道风切变的探测与预警研究》,本项目主要利用多普勒激光雷达(LIDAR)扫描跑道起降区域内三维风场,获取实时资料,以此来进行风切变的自动识别和预警。
Harris等(1985)首次提出了直接计算差值滤波合成切变算法。该算法在笛卡尔坐标系中分别计算一维径向风切变和一维方位切变。2002年,香港国际机场首次引进了第一台服务于低空风切变预警业务的多普勒激光雷达,为香港机场在晴空条件下进行低空风切变、湍流、尾流等探测。并且香港天文台自行研发了一套自动预警低空风切变系统,应用下滑道这个更加具有针对性并且时间短的扫描方式,称之为下滑道扫描策略GPScan(Glide Path Scan),以及自动识别算法GLYGA[1]。2006年,香港天文台调整了第1台激光雷达的位置,改进了第2部激光雷达的扫描策略,组成了全世界首套可以覆盖机场起飞进近走廊的激光雷达风切变预警系统LIWAS[2]。2016年,天津民航大学蒋立辉在香港天文台的方法基础上尝试了单斜坡和双斜坡共同检测的方法,双斜坡检测的意义是检测风廓线中速度梯度的变化改变率进而判别低空风切变[3]。本文通过对实时探测资料进行插值处理后,选取飞机下降过程中经过的区域内的数据来构成下滑道顶风廓线,并通过采用不同尺度的步长来对顶风廓线进行检测,最后加以整合,以此获得风切变发生的位置和区域,并将其标识出来,从而为管制员指挥飞机起降以及飞行员执行飞机起降提供预警[4-16]。
1 设备简介
多普勒激光雷达采用青岛华航环境科技有限责任公司的Windprint S4000 LIDAR,其性能参数如表1所示:
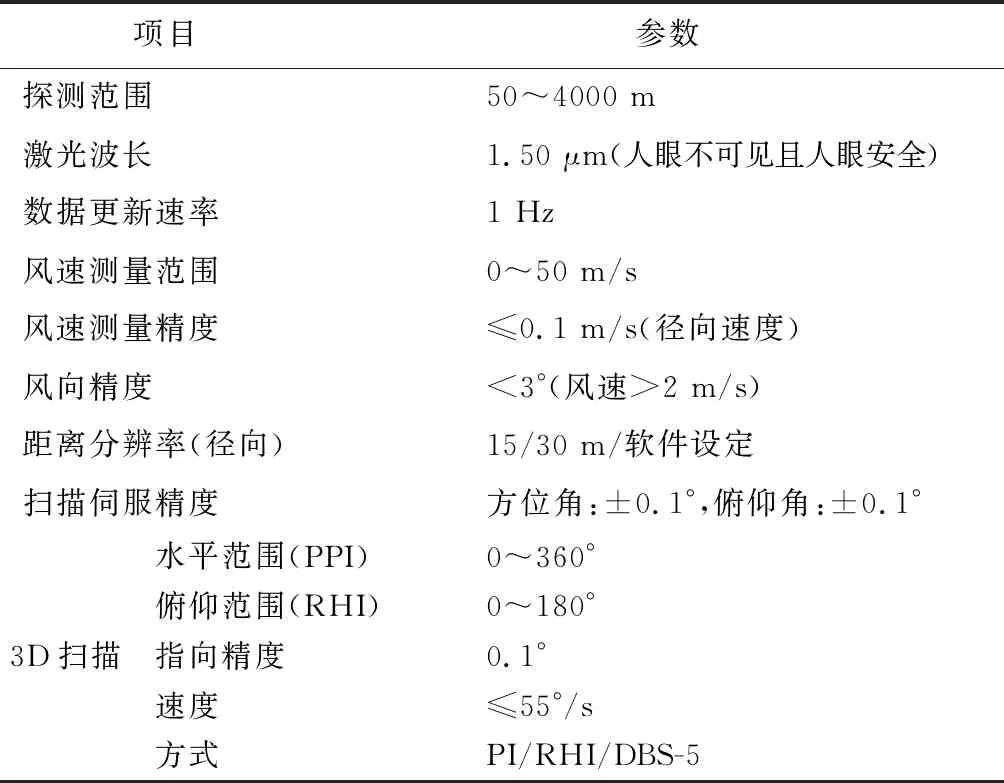
表1 LIDAR性能参数
本文使用的LIDAR布置于首都国际机场西跑道南端(36L端)。综合供电、避障及观测需求等因素,激光雷达位置选取距跑道中心线约105 m,距36L端的飞机接地点(Touchdown Zone)南北距离约120 m,如图1所示。
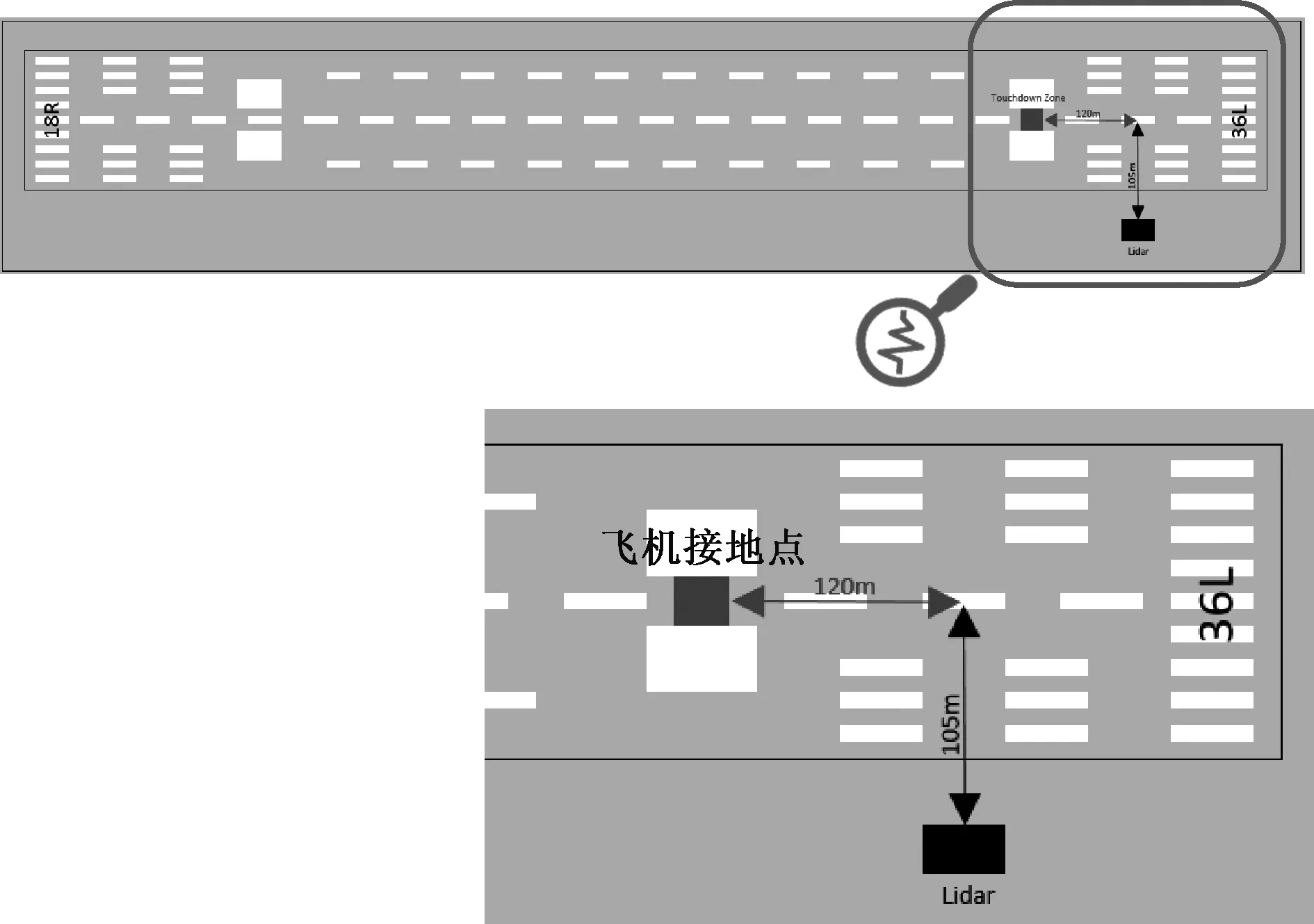
图1 LIDAR在西跑道的安装位置
2 探测模式
飞机在降落过程中受到的风的作用,如图2所示。将飞机飞行的方向设为X轴,垂直于飞机的方向设为Y轴。将大气中的真实风分别分解到X轴和Y轴上,那么X轴上风的分力叫做顶风(值为负时称为顺风),Y轴上风的分力叫做侧风(值为负时称为左侧风、值为正时称为右侧风)。
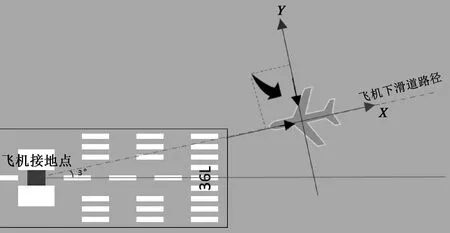
图2 飞机在降落中受到的风的作用力
基于首都国际机场西跑道风切变发生的时间短、空间尺度小等特点,华北空管局气象中心联合中国海洋大学[17-18]共同研究决定,采用下滑道模式来探测跑道附近飞机起降区域的风场结构,如图3所示。
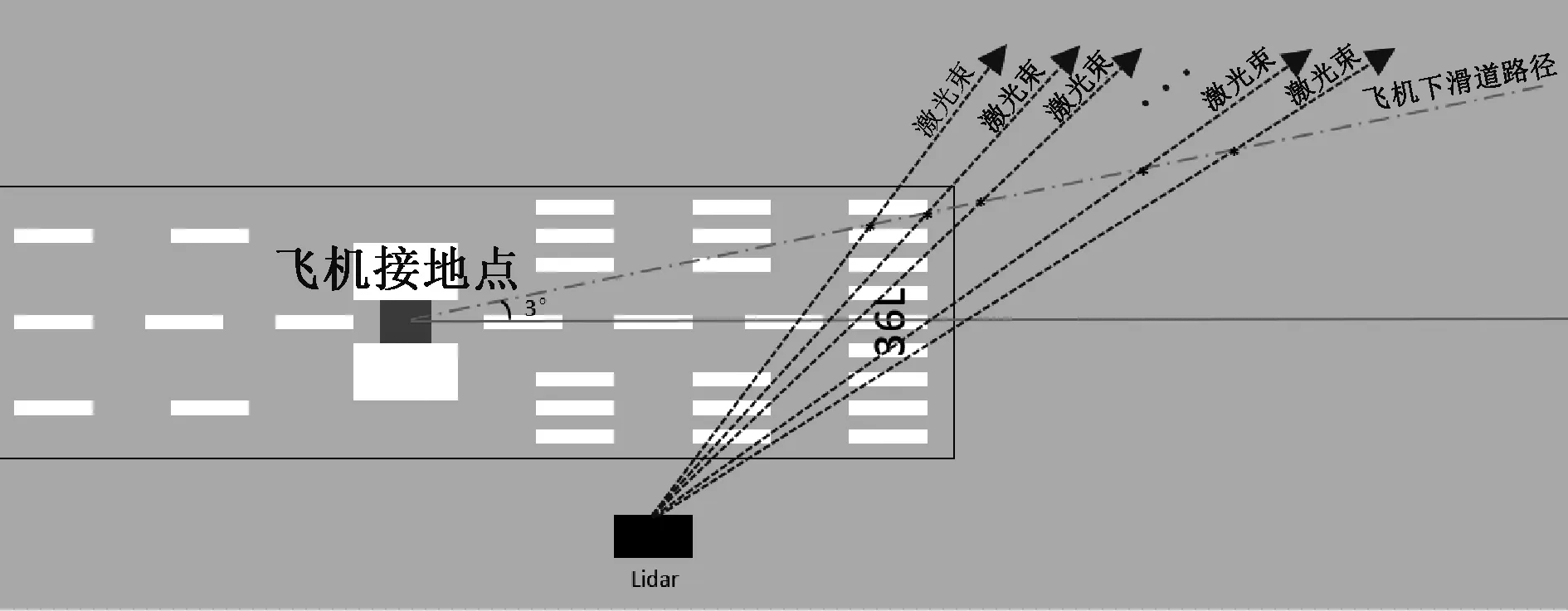
图3 LIDAR的下滑道探测模式
该模式通过对下滑道路径与跑道夹角、激光雷达与跑道中心线及着陆点的相对位置等位置参数进行精确几何计算,得到下滑道路径上不同位置相对于激光雷达的俯仰角和方位角信息。LIDAR按照计算出来的俯仰角和方位角进行扫描,这样,激光束扫描范围会覆盖整个下滑道区域。另外,由于激光束与下滑道路径的夹角大于30°时,激光束探测到的径向风速值与下滑道路径上(即图2中的X轴)的风速分量相比,差异会越来越大;同时,侧风对飞机的影响会越来越大,这将影响到风切变的检测。因此只有与下滑道路径的夹角小于30°的激光束的探测数值才会被认为是合理的,接近飞机着陆过程中实际经历的风速大小,可用于计算风切变。本文中,LIDAR采用从方位角148.4°到172.6°共做42条射线(图3中自左至右激光束)的观测,其相应的仰角分别从4.92°变到2.92°。
基于上述原理,提取下滑道路径上的径向风速便可得到顶风廓线信息,进而识别风切变位置、高度、强度和时间等特征。
综合诸多因素考虑,如反演沿跑道方向的低空风场、反演水平风场廓线等,在一个扫描周期中设置了下滑道扫描、PPI扫描和RHI扫描。一个完整的扫描模式含有8个任务,分别为:①RHI模式:仰角为0°~45°,方位角分别为153°、163°、173°、333°、343°、353°;②点扫模式:仰角为10°,方位角分别为135°、145°、155°、165°、175°、185°、195°、205°、215°、225°;③GPScan扫描;④点扫模式:仰角为90°,固定方位角172°,共扫描30次;⑤GPScan扫描;⑥RHI模式:同①;⑦点扫模式:仰角为10°,方位角分别为45°、35°、25°、15°、5°、355°、345°、335°、325°、315°;⑧GPScan扫描。一个扫描周期为8 min,其中用于探测机场风切变的下滑道扫描模式的时间约占60%,RHI扫描模式是为了反演沿跑道方向的低空风场,点扫模式是为了反演水平风场廓线。本文主要使用下滑道扫描模式所得到的数据来进行风切变探测与识别。
3 探测个例
图4为2019年5月19日发生大风现象时的下滑道扫描显示,从12:06—13:51之间能明显地看出大风过境的现象。12:06雷达探测到的径向风速在5~15 m/s之间,5 min后在距离雷达2 km处东南方向径向风速开始加大,12:36局部径向风速增大现象已经很明显了,而到13:06径向风速已经基本增大到20 m/s,持续半个多小时后,径向风速开始下降,13:51径向风速已明显降低。
4识别风切变
4.1 数据处理
下滑道扫描模式中,沿激光束径向的数据分辨率为30 m,而在沿着下滑道路径方向上的分辨率却不均匀,会随着径向距离变远而增加。为了使得提取出来的顶风廓线空间分辨率均匀,本文使用MATLAB软件,在尽可能保留原始探测数据中的风速结构特征的条件下,采用10 m×10 m的网格对原始探测数据进行插值。
本文首先将探测数据由极坐标转换为笛卡尔坐标,然后选取大于此笛卡尔坐标的坐标范围,设置10 m×10 m网格;最后,利用Cubic方法进行插值,得到每个网格点的坐标和风速值(图5)。
4.2 提取顶风廓线
顶风廓线是由沿着飞机下滑道路径上的径向速度值构成的。在选取顶风廓线时,采用插值后的网格点的位置作为判断依据。如图6所示,A为某个网格点,B为经过网格点A的激光束与下滑道路径的交点,设A到Lidar的距离为r1,B到LIDAR的距离为r2,如果r1和r2相差不超过20 m,那么此网格点的风速值就会被采用。即最后得到的顶风廓线是由以下滑道为中心线,左右20 m范围内的网格点的数据组成的。
根据LIDAR设置的扫描俯仰角和方位角计算得出,LIDAR可以探测到高度范围为19~138 m、距离范围为距离飞机着陆点360~2700 m的区域。因此,最终提取出来的顶风廓线位于3°下滑道路径上距离飞机着陆点360~2700 m之间。
4.3 风切变检测
顶风廓线能很好地显示出下滑道路径上的顶风量是增加还是减少。本文借鉴香港天文台的GLYGA算法进行风切变检测,从顶风廓线中找出风切变斜坡,即在距离长度ΔH上的速度改变量ΔV,如图7所示。
首先,将顶风廓线上相邻两点间的速度差异计算出来,构建成速度增量廓线,顶风廓线和增量廓线如图8所示。由图可知,顶风廓线的前后都被适当地延长了一段距离,这是因为在做下一步插值计算时,末端的点会由于不能参与计算而丢失。所以,本文在做处理时,用廓线的第一个点的值往前端补足了一段距离,用廓线的最后一个点的值往后端补足了一段距离。
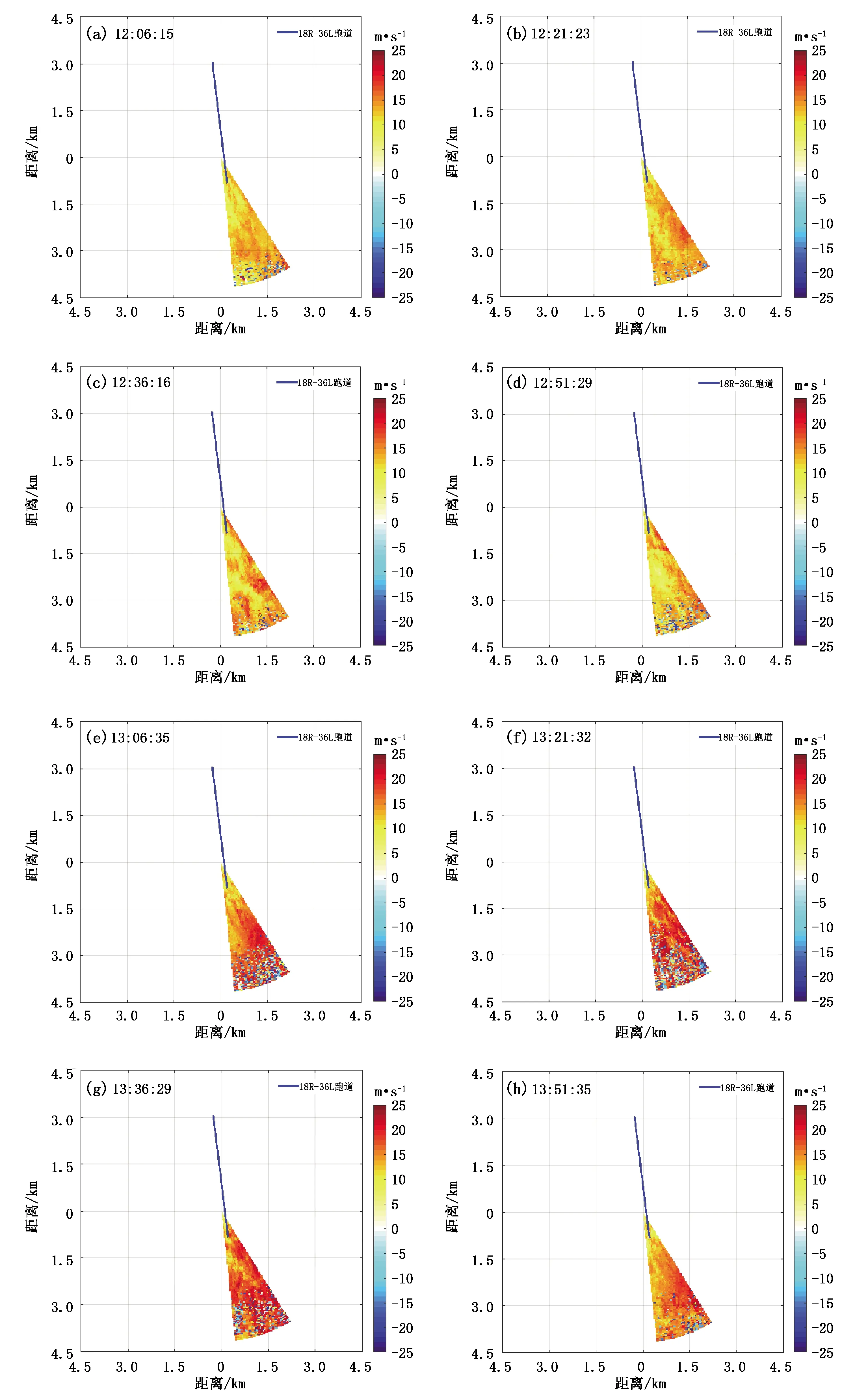
图4 2019年5月19日大风过境时激光雷达实测径向风速
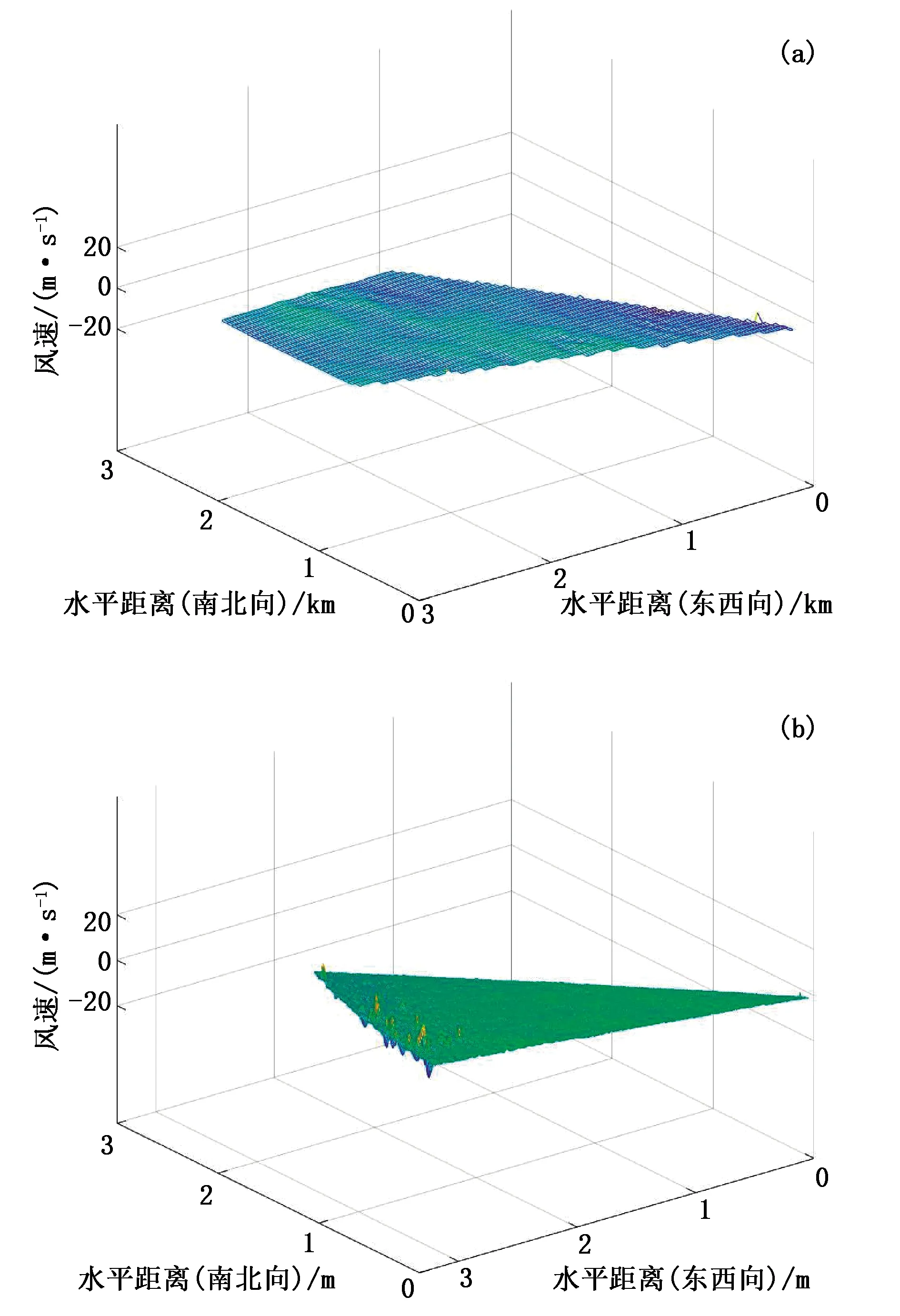
图5 LIDAR探测数据与插值后三维数据的对比: (a)LIDAR探测,(b)插值后
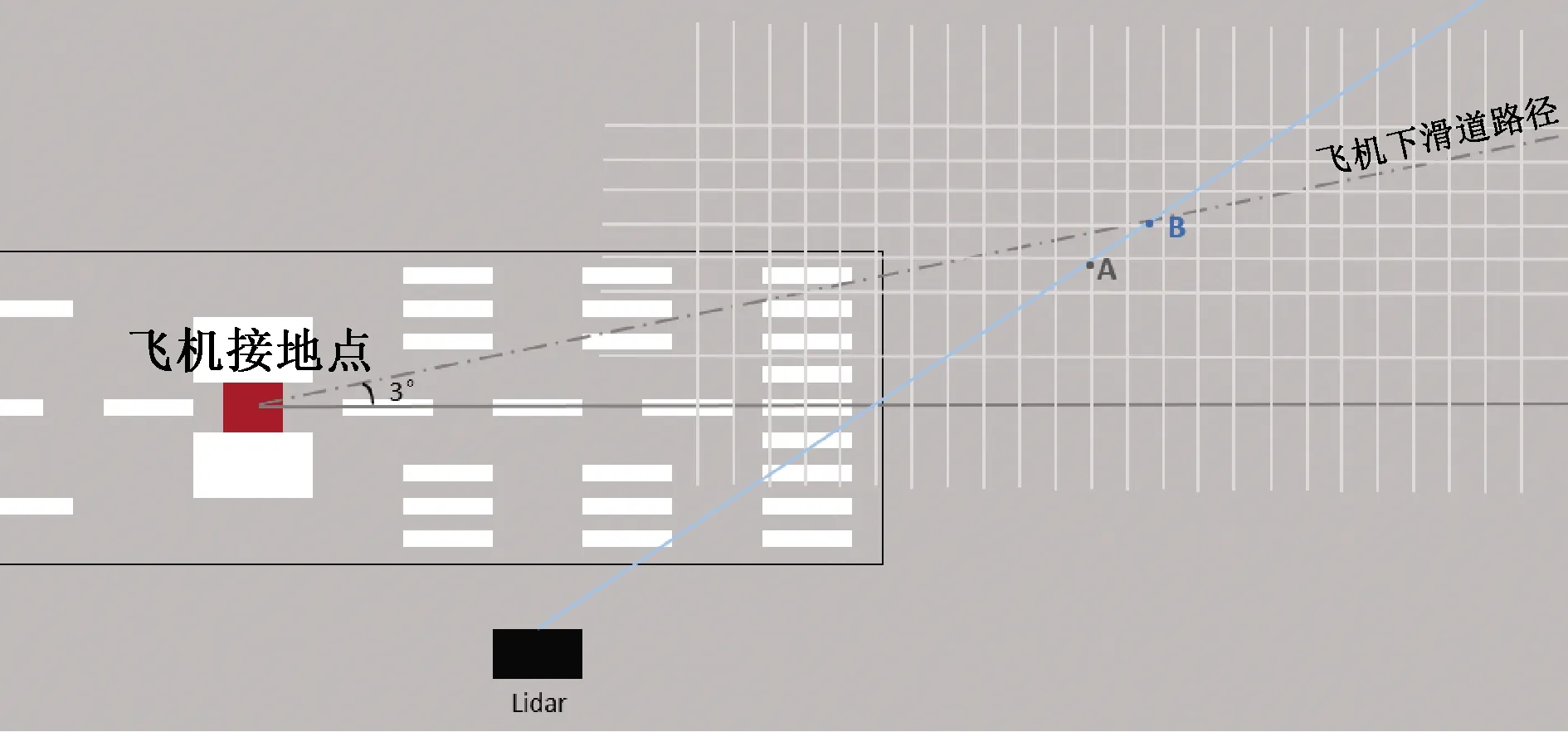
图6 提取顶风廓线的判断方法 (A为某个网格点,B为经过点A的激光束与下滑道路径的交点)
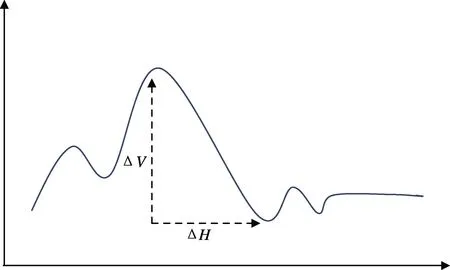
图7 风切变斜坡
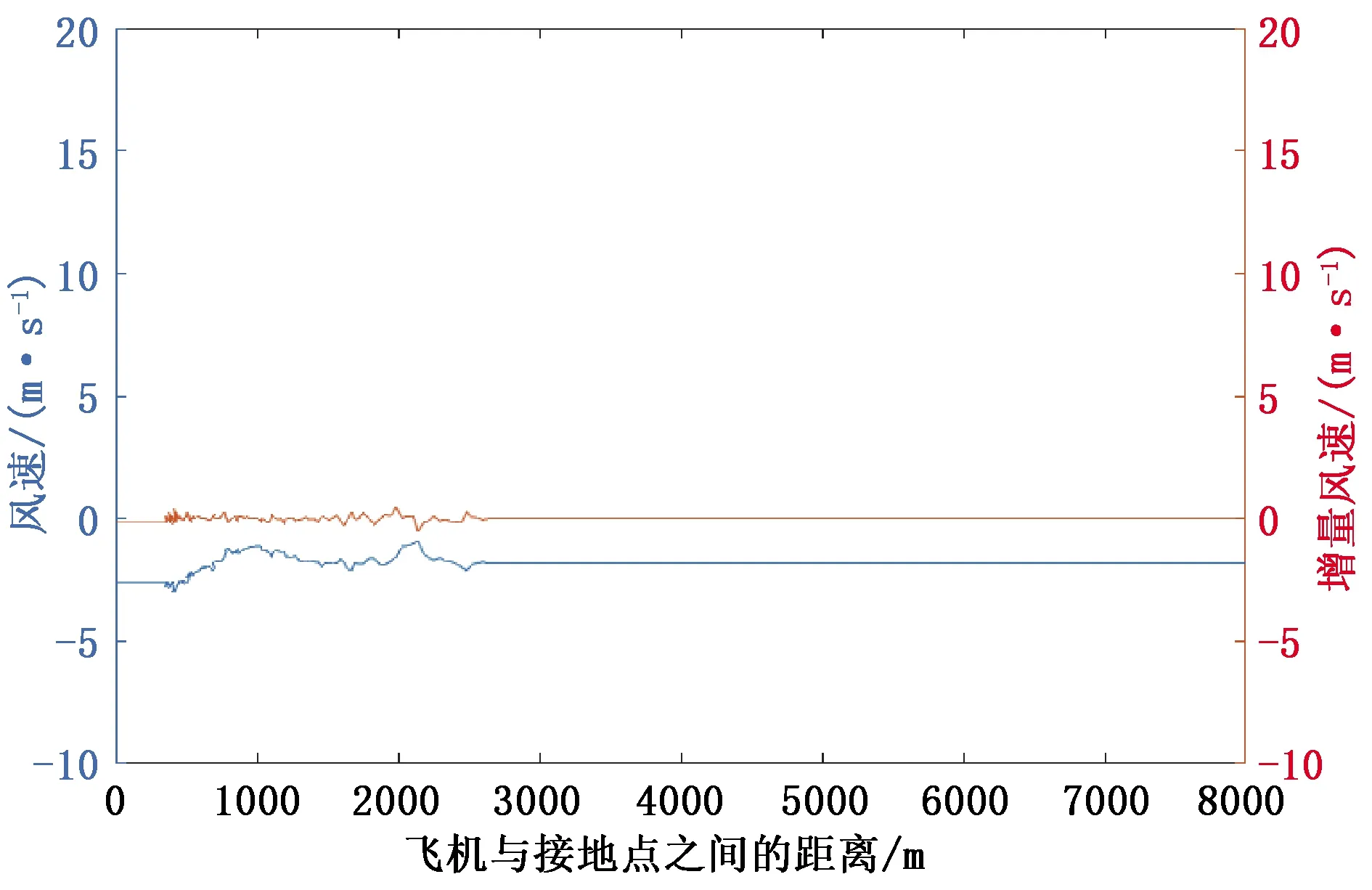
图8 顶风廓线和顶风增量廓线
然后,采取不同尺度的步长来对风切变进行检测。本文采用步长尺度分别为100 m、200 m、400 m、…、3200 m,一步步增加。按不同尺度步长进行检测之前,需要对增量廓线进行平滑,这是为了更好地体现出顶风廓线的变化结构。风切变斜坡的判断方法是:①比较平滑后的增量廓线上某个点与其左右相邻两个点的差值符号,判断这个点是否是极值点;②如果是极值点,那么再判断这个点在当前的检测步长中的速度改变量ΔV;③国际通用的风切变阈值为15 kn(1 kn = 0.5144444 m/s),如果ΔV≥15 kn,那么就记为风切变。
最后,整合各尺度步长下检测出来的风切变斜坡。总的来说,一条顶风廓线上会包含不止一个风切变斜坡,那么,检测出来的所有风切变斜坡将由ΔV/ΔH1/3因子来判断优先级,最终只有最大强度的风切变斜坡被保留。得出最终的风切变区域后,将其在顶风廓线上标识出来(图9中黄色区域)。图9检测到的是2019年1月14日21:31发生在首都国际机场西跑道36L端的风切变,该风切变发生在距离飞机着陆区域700~2000 m的位置,距离地面40到150 m的高度。
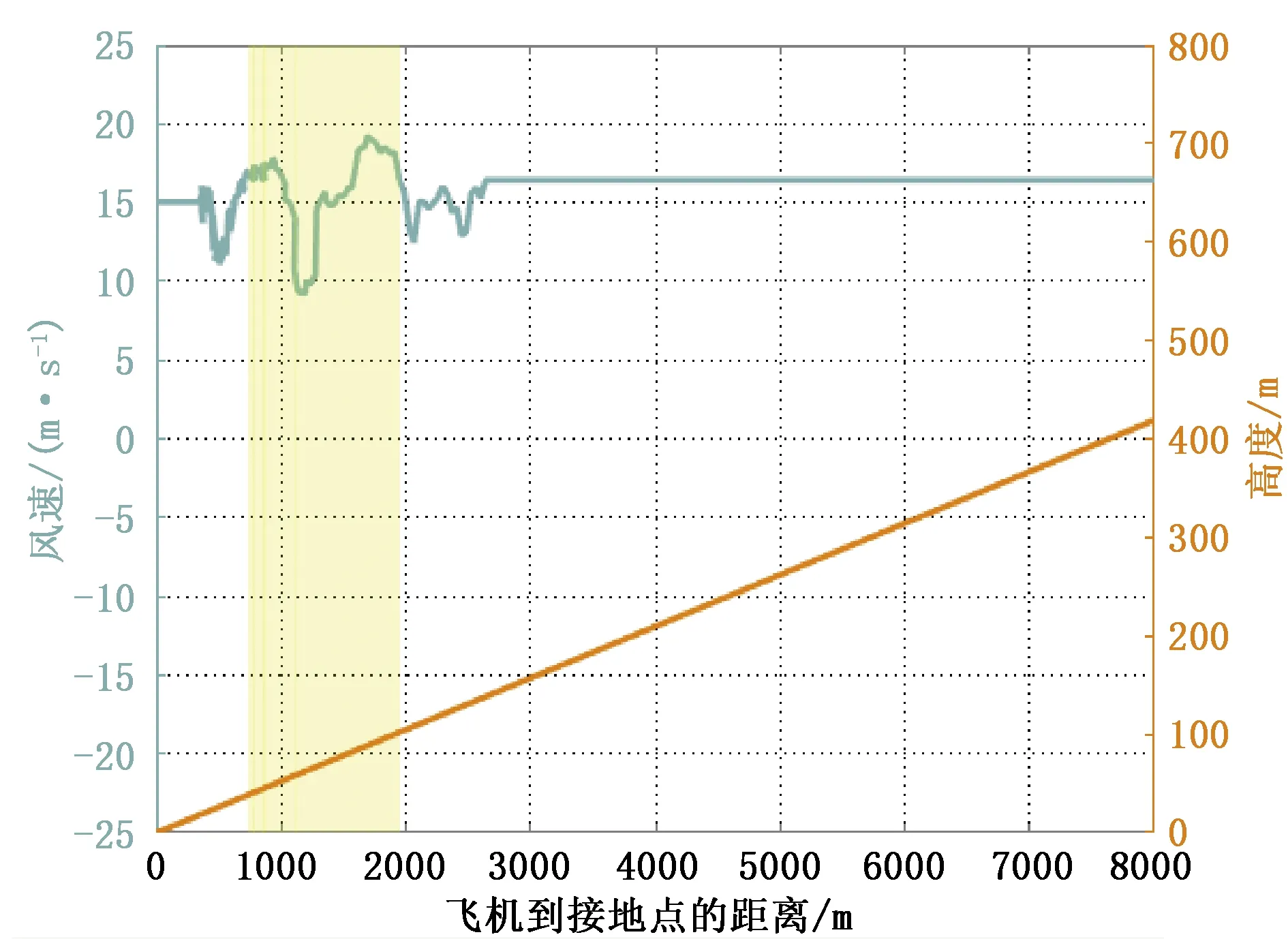
图9 检测到风切变(黄色区域)的顶风廓线 (2019年1月4日21:31)
5 结果验证
通常,飞机机组在遭遇风切变事件时,会向空中交通管制部门(ATC)提交风切变报告。报告中的内容含有时间、跑道使用端、发生风切变时飞机高度、报告的原因等信息。因此,本文将用机组提供的报告来验证风切变检测结果。
2018年12月11日至2019年2月7日期间,首都国际机场西跑道36L端共收到19份机组风切变报告。按照接收到机组报告的时间,找出时间最接近的雷达观测数据,进行风切变检测。结果发现,19份机组报告中有4份的风切变发生高度超过了雷达的探测高度;有11份的时间点能检测到风切变;另外有4份机组报告的时间点不能识别到风切变。机组报告和对应的雷达探测数据检测结果如表2所示。
在一个扫描周期中,第1个下滑道扫描和第2个下滑道扫描之间间隔2 min 40 s,第2个下滑道扫描和第3个下滑道扫描之间间隔3 min 15 s,第3个下滑道扫描和下一个扫描周期的第1个下滑道扫描之间间隔1 min 45 s,所以机组的风切变报告和执行下滑道模式探测之间会存在一定的时间差。下滑道扫描模式的参数设置决定此模式的探测高度范围为19~138 m、距离范围为距离飞机着陆点360~2700 m的区域,会有一些机组报告的发生高度在此范围之外。因此,统计结果显示,风切变识别算法的检测率为73.33%。
6 结论与讨论
多普勒激光雷达弥补了首都国际机场现有气象探测设备测风的不足,能在晴天条件下探测机场边界层风场结构;并且由于其体积小,便于在跑道旁边安装; 扫描仪的灵活性使其能满足下滑道扫描模式

表2 机组报告风切变和检测到的风切变结果对比
不停变换方位角和俯仰角的需求。本文使用相干多普勒激光雷达,执行下滑道扫描模式,对跑道附近飞机起降区域进行探测,获取三维风场,进行了如下分析。
(1)通过处理实时探测资料,选取下滑道区域内的数据来构成下滑道顶风廓线,采用风切变识别算法对顶风廓线进行检测,以此获得风切变发生的位置和区域,并将其标识出来达到预警目的,本文以首都机场西跑道的36L跑道端接收到的机组报告为准,按照机组报告风切变事件的时间点,找出对应的雷达扫描数据,提取出顶风廓线后,对其采用自动检测算法进行识别。将检测结果与机组报告进行对比,结果表明,检测算法识别出的风切变报警率为73.33%。
(2)由于首都国际机场西跑道发生风切变的概率大,发生风切变的空间尺度小、强度大,而且在冬季盛行西北风和偏西风时,首都机场多采用36L端起降,因此激光雷达执行下滑道扫描的频率应该要更高。
(3)本文中激光雷达由于受到供电、通讯等安装限制条件,只能安装在跑道内侧的位置。但实际上,为使得激光雷达能有效探测到更宽的高度范围,应该安装在跑道延长线或者接近延长线的位置,这样覆盖飞机起降的区域会更广。
(4)实际工作中只有一台激光雷达对这条跑道进行探测,而由于单台激光雷达的探测并不能完全满足风切变监测需求,如果有两台激光雷达能组网探测,既能获得径向风信息,又能获得侧风信息,将会更有利于风切变的监测。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
汽车观察(2021年8期)2021-09-01
空间科学学报(2021年4期)2021-08-30
科技研究·理论版(2021年20期)2021-04-20
杂文选刊(2020年1期)2020-01-10
电子制作(2018年16期)2018-09-26
汽车电器(2017年1期)2017-12-06
证券市场周刊(2016年21期)2016-06-20