车辆跟驰模型的扭结-反扭结波解
2021-05-27 02:50吴春秀陈明玉
泉州师范学院学报 2021年2期
吴春秀,陈明玉
(泉州师范学院 数学与计算机科学学院,福建 泉州 362000)
在实际交通中,初始均匀的交通流受到小扰动后会演化形成拥堵交通.通常用宏观、微观和半离散模型研究交通拥堵问题.宏观交通流模型从连续介质的视角,研究车辆的集体行为[1-2].微观跟车模型从空间离散的视角,研究单个车辆的运动规律[3-9].半离散模型可视为联系宏观模型和微观模型的桥梁[10-11].宏观模型的窄幅急簇和宽移动堵塞解通常可描述交通的拥堵状况.微观车辆跟驰模型则用KdV孤立波解和mKdV扭结-反扭结波解描述拥堵交通.本文建立后视速度差车辆跟驰模型,对模型进行非线性分析,推导出模型方程的扭结-反扭结波解,并分析这种解存在的必要条件,合理解释模型方程是否存在扭结-反扭结波解,同时讨论参数的选取对交通系统稳定性的影响.
1 模型方程
在车辆跟驰模型中,前车的信息对车辆速度影响较大,因而一些优化速度模型只考虑前车信息[3,7].由于后车的信息对车辆速度也有影响,我们提出如下后视速度差模型(简称BLVD模型):
(1)
其中:V(Δvn)为优化速度,vn和xn分别表示t时刻第n辆车的速度和位置,Δxn=xn+1-xn和Δvn=vn+1-vn分别表示t时刻第n和n+1第辆车的车头间距和相对速度,司机敏感度a>0、λ≥0.在车辆行驶过程中,第n辆车跟随第n+1辆车,车辆之间的跟驰关系如图1所示,其中箭头方向表示车辆行驶的方向.

图1 车辆跟驰关系Fig.1 The relationship of vehicles
选取优化速度


用向前差分格式表示时间导数,方程(1)可写成差分形式.运用长波展开法对模型方程[5-6]的差分形式进行线性稳定性分析,可得模型方程的线性稳定区域为τ≤τc,其中临界弛豫时间
(2)
弛豫时间τ=1/a,敏感率l=λ/a.
2 非线性分析
方程(1)用车头间距形式表示如下

(3)
引入慢变量X和T[5]:
X=ε(n+bt),T=ε3t,0<ε≪1.
(4)
其中:b为待定常数.车头间距
Δxn=h0+εR(X,T).
(5)
其中:h0表示初始均匀交通流的车头间距,R(X,T)表示偏离幅度,0<ε≪1.


其中:VB′=VB′(h0),VB′′′=VB′′′(h0),VF′=VF′(h0)且VF′′′=VF′′′(h0).选取b=b1VB′+b2VF′, 可得ε2系数为零.选取τ=(1+ε2)τc,结合方程(2), 上述方程可简化为
(6)
其中:
g1=-[7(b2VF′-b1VB′)/(b1VB′+b2VF′)+14l-9(1+4l+2l2)b2VF′-9(1+2l+2l2)b2VB′]/54,
g2=-(b1VB′′′+b2VF′′′)/6,
g3=A2/6,
g4=-23A4/648-l(4A/3-10A2/3-32A3/27)/24+A[(1+4A)b1VB′-(1-4A)b2VF′]/
[72(b1VB′+b2VF′)],
g5=-A[(1-2A)b2VF′′′-(1+2A)b1VB′′′]/[36(b1VB′+b2VF′)],

(7)

(8)
其中:b=b1VB′+b2VF′.
选取安全间距hc=h0=4.0,最大速度vmax=2.0,当参数(l,b1,b2)取不同值时,可得车头间距-敏感度图,如图2所示,其中实线表示方程(2)对应的曲线(称为中性稳定曲线[5]),虚线表示方程(8)对应的曲线(称为共存曲线[5]).

图2 车头间距-敏感度图Fig.2 Phase diagram in the headway-sensitivity space
图2(a)、(c)-(d)显示,对每一组(l,b1,b2),交通状态分为三个区域:位于共存曲线上方的稳定区域;介于共存曲线和中性稳定曲线之间的亚稳定区域;位于中性稳定曲线下方的不稳定区域[5].由图可知,适当考虑前车的相对速度和后视效应,可使中性稳定曲线和共存曲线的位置下降,稳定区域扩大.
由上述非线性分析,可得扭结-反扭结波解存在的必要条件为
(9)
为了得到扭结-反扭结波解,由(9)式可推导出敏感率和弛豫时间随着后视权重变化的取值范围,如表1-2所示,其中后视权重b1∈[0,0.4],安全间距hc=4.0,最大速度vmax=2.0,表1和表2中的初始间距分别为h0=4.0和h0=3.5.由表1可知,当后视权重b1=0.2时,要使扭结-反扭结波解存在,则需敏感率l>0.79.因而在图2(b)中不存在相应的共存曲线,其中后视权重b1=0的情况与图2(a)中对应,这里的共存曲线省略.表1-2显示:如果后车权重b1增大或者初始间距h0减小,敏感率l需要增大.否则,mKdV方程的扭结-反扭结波解不存在.
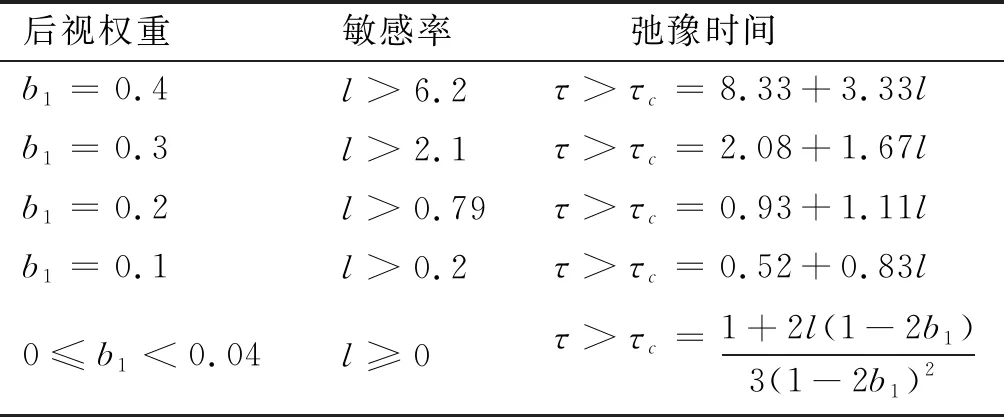
表1 第一种初始间距对应的敏感率和弛豫时间的变化范围Tab.1 The regions of sensitivity ratio and relaxation time corresponding to the first initial headway

表2 第二种初始间距对应的敏感率和弛豫时间的变化范围Tab.2 The regions of sensitivity ratio and relaxation time corresponding to the second initial headway
3 数值模拟
选取初始条件Δxj(0)=Δx0=3.5,j=1,2,…,N;Δxj(1)=3.0,j=N/2, Δxj(1)=4.0,j=N/2+1,且Δxj(1)=3.5,j≠N/2,N/2+1, 其中车辆总数N=100.选取安全间距hc=4.0,最大速度vmax=2.0,敏感度a=1.6,道路长度L=NΔx0=350且弛豫时间τ=1/a=0.625,在周期边界条件下对方程(3)进行数值模拟,可得t=10 000后的车头间距时空演化图,如图3所示.图(a)-(f)分别对应如下6种情况:(a)OV模型,其中l=0,b1=0,b2=1.0且τc=0.424;(b)FVD模型,其中l=0.1,b1=0,b2=1.0且τc=0.509;(c)FVD模型,其中l=0.2,b1=0,b2=1.0且τc=0.594;(d)SBLOV模型,其中l=0,b1=0.2,b2=0.8且τc=0.944;(e)BLVD模型,其中l=0.13,b1=0.2,b2=0.8且τc=1.127;(f)BLVD模型,其中l=0.13,b1=0.04,b2=0.96且τc=0.6.
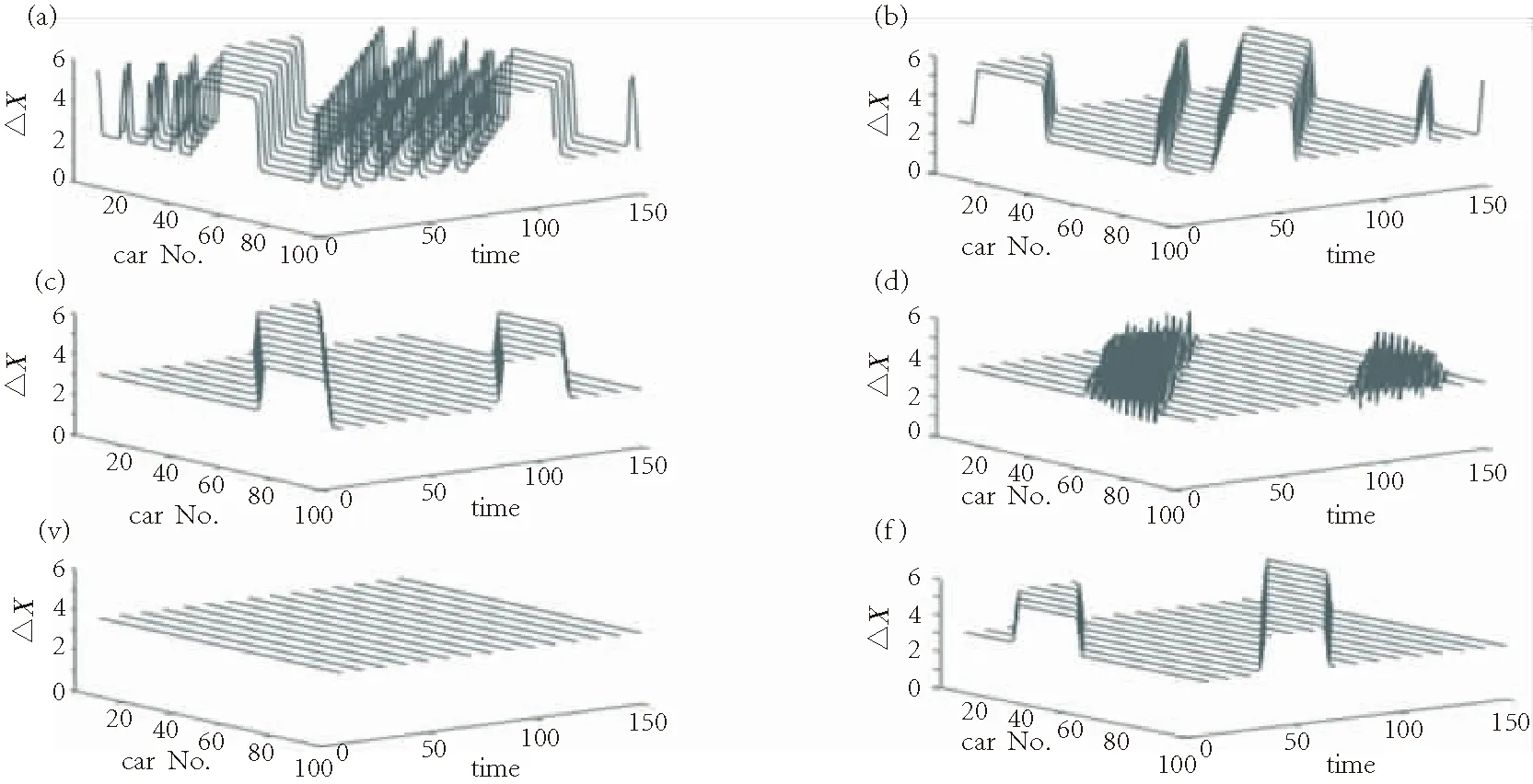
图3 车头间距时空演化图Fig.3 Space-time evolutions of the headway
图3(a)-(b)中演化形成的波由窄幅集簇和宽幅集簇组成.当敏感率l增大时,FVD模型的一个扭结-反扭结波解出现在图3(c)中.图3(a)-(c)表明增大敏感率能够提高交通系统的稳定性.图3(d)-(e)中不存在扭结-反扭结波的原因是:这两组参数不满足表2中扭结-反扭结波存在的必要条件.由图3(d)可见,SBLOV模型演化形成振荡拥挤交通.当敏感率增大时,图3(e)中出现自由流.当后视权重b1减小时,BLVD模型的扭结-反扭结波解在图3(f)中出现,表明交通系统的稳定性降低.图3中的6种情况表明:适当考虑敏感率l和后视权重b1能够明显提高交通系统的稳定性.
在BLVD模型中,重新选取两组不同参数,车头间距时空演化图如图4,其中图4(a)-(b)中的参数分别对应如下2种情况:(a)a=1.6,l=0.1,b1=0.04,b2=0.96;(b)a=1.08,l=0.355,b1=0.1,b2=0.9 .图4(a)中出现与图3(f)类似的扭结-反扭结波.当后视权重b1增大时,要使扭结-反扭结波存在,敏感率l和弛豫时间τ都需要增大.因此当选择了较小的敏感度a时,忽略小振荡,模型可演化形成一个扭结-反扭结波,如图4(b).图4中的两种情况均满足表2中扭结-反扭结波存在的必要条件.
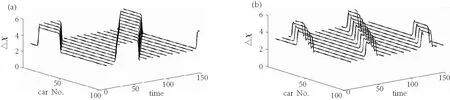
图4 BLVD模型车头间距时空演化图Fig.4 Space-time evolutions of the headway of BLVD modle
猜你喜欢
读者(2022年13期)2022-06-20
心理学报(2022年5期)2022-05-16
北京航空航天大学学报(2021年9期)2021-11-02
文萃报·周五版(2021年11期)2021-06-23
当代陕西(2020年17期)2020-10-28
军事文摘(2020年24期)2020-02-06
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14
小学生导刊(低年级)(2016年5期)2016-05-27
校园足球(2010年8期)2010-01-24