海流扰动下无人水下航行器的动态面反演轨迹跟踪控制
2021-05-31 11:24曹晓明沈智鹏
系统工程与电子技术 2021年6期
曹晓明, 魏 勇, 衡 辉, 沈智鹏
(1. 海军潜艇学院导弹兵器系, 山东 青岛 266199;2. 大连海事大学船舶电气工程学院, 辽宁 大连 116026)
0 引 言
无人水下航行器(unmanned underwater vehicle, UUV)可以深入海洋完成水雷布放、侦查巡逻、资源勘探等任务,因此在军事领域以及海洋工程领域得到了广泛应用。UUV本身欠驱动的动力学特性以及强耦合特性使控制器的设计过程相对复杂。与此同时,外界未知扰动的影响[1]使得控制系统设计难度进一步增大。
为了解决UUV的轨迹跟踪控制问题,诸多学者已经提出了各种控制技术。例如,比例微分(proportional differential, PD)控制[2]、鲁棒PD控制[3]、滑模控制[4]、终端滑模控制[5]等。近年来,反演法[6-7]被广泛应用到非线性系统控制器设计中。Zhang[8]引入李雅普诺夫理论和反演法,设计UUV轨迹跟踪控制器,取得了较好的控制效果。为解决传统反演法中可能会存在的“微分爆炸”问题,动态面控制技术[9-11]被引入到设计过程中,获得了令人满意的控制效果。
Cui[12]研究了全驱动UUV的水平面轨迹跟踪控制问题,通过理论和计算机仿真充分验证了控制算法的有效性。Gan[13]建立了UUV的二维运动学模型,提出一种模型预测轨迹跟踪控制方法,取得了良好的控制效果。Yan[14]采用全局有限时间控制策略,解决水下机器人的轨迹跟踪控制问题,设计控制器并通过软件仿真证明了所设计方法的可行性。上述文献仅针对二维轨迹进行控制器设计和仿真,而相对复杂的三维轨迹跟踪控制更加符合军事和海洋领域中的实际应用需求。
在UUV航行过程中外界海流干扰是难以避免的,设计控制器时考虑扰动的影响能有效提高系统抗干扰能力。徐健[15]针对欠驱动UUV三维轨迹跟踪控制问题,设计带有虚拟速度误差变量的反步控制器,取得了理想的控制效果。Yan[16]针对存在时变干扰影响的UUV轨迹跟踪控制问题,设计了一种基于反步滑模模糊切换增益的欠驱动UUV轨迹跟踪控制方法,能够在存在扰动的情况下获得较好的跟踪效果。Li[17]设计了一种具有双环结构的反步滑模控制器, 通过积分滑模面来保证跟踪误差的收敛性,UUV轨迹跟踪系统具有一定的抗干扰能力。Rangel[18]引入非奇异终端滑模控制策略,使得系统误差快速收敛,获得了令人满意的结果。上述文献设计的控制器都有一定的抗干扰能力,但是这些算法都是依靠模型或控制器自身来补偿干扰,当外界扰动较大时很难保证系统的稳定性。
在轨迹跟踪控制器设计时,采用先进算法对外界扰动进行估测能够提高系统的鲁棒性。Liu[19]把非线性干扰观测器应用于带有不确定性的水下航行器系统轨迹跟踪控制,有效提高了系统抗干扰能力。Rashad[20]针对非线性多输入多输出(multiple input multiple output, MIMO)系统,提出了一种基于干扰观测器的新型控制器,能够在扰动存在的情况下有效镇定系统。Liang[21]提出了一种基于运动学模型的洋流观测器来估算自主水下航行器系统受到的未知洋流干扰,使得系统具有良好的鲁棒性。Mobayen[22]和Qiao[23]引入自适应控制方法来对干扰进行补偿,获得了理想的控制效果。文献[24-26]引入一种洋流观测器,用来估测船舶航行中外界存在的恒定洋流干扰,取得了良好的估测控制效果,但所设计的观测器只能对定常扰动进行有效估测,对时变扰动则无法证明其有效性。本文对文献[24-26]所述洋流观测器进行了算法改进,改进后的观测器通过对扰动观测项的实时补偿,能够有效估测出外界时变海流干扰。
为使所设计的控制器更加符合UUV实际航行要求,本文针对存在未知海流干扰影响的UUV的轨迹跟踪控制问题,设计一种欠驱动UUV动态面反演轨迹跟踪控制策略。该策略采用反演法设计控制器,引入动态面控制(dynamic surface control, DSC)方法将控制算法中的代数运算代换为微分运算,并设计改进型海流观测器来估测航行器动力学模型中存在的未知扰动。最后,以一艘流线型UUV为控制目标,对慢时变、快时变和复合型干扰3种情况分别进行轨迹跟踪控制仿真,验证所设计算法的有效性。
1 问题描述
假设所研究的欠驱动UUV为悬浮刚体且质量分布均匀,忽略高阶非线性水动力阻尼项的影响,不考虑横摇运动的影响,则欠驱动UUV的5自由度运动学模型可以写为
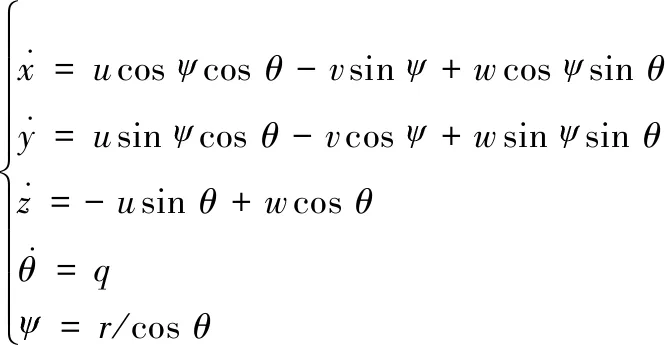
(1)

同时,考虑海流的干扰作用则欠驱动UUV的动力学模型可以写为
(2)


图1 UUV与参考坐标系Fig.1 UUV and reference frames


针对欠驱动UUV运动学模型式(1)和动力学模型式(2),在满足假设1和假设2的前提下,考虑系统存在时变海流干扰的情况。基于改进型海流扰动观测器设计UUV轨迹跟踪控制器,保证闭环控制系统收敛,实现UUV对期望轨迹的精确跟踪。
2 改进型海流观测器

(3)
式中,参数矩阵χ1=diag(χu1,χq1,χr1)和χ2=diag(χu2,χq2,χr2)均为正定矩阵,列向量
证明选取Lyapunov函数如下:
(4)
对Vd求导并结合式(2)和式(3)整理,得
(5)

(6)
进一步有
(7)

证毕
文献[24]所设计观测器能够对恒定海流扰动进行有效观测,若取消海流扰动为常值的假设,则无法保证观测系统的收敛性。
3 轨迹跟踪控制器设计
3.1 虚拟速度变量设计
惯性坐标系下UUV的位姿跟踪误差定义如下:
(8)
式中,
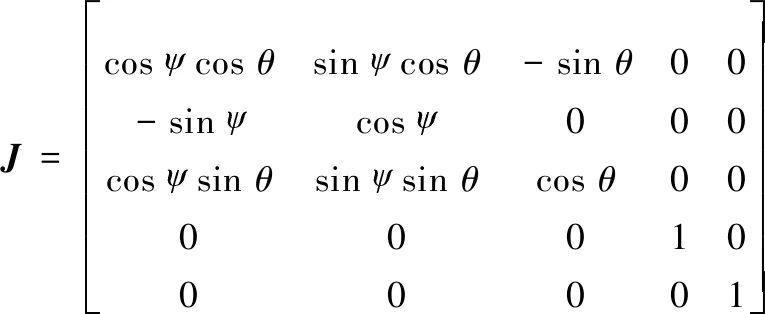
为了方便控制器设计,通过转换矩阵将惯性坐标系下的位姿误差转换到附体坐标系下:
(9)
对附体坐标系跟踪误差式(8)求导,得
(10)

选取Lyapunov函数:
(11)
对式(10)求导,可得
(12)
将式(9)代入式(11),并结合式(1)整理,得

(13)
虚拟速度变量设计如下:
(14)
3.2 动力学控制器设计

(15)
(16)
速度跟踪误差[29]定义如下:
(17)
对速度误差变量式(16)求导,并结合动力学模型式(2)整理,得
(18)
选取Lyapunov函数:
(19)
对式(18)求导,可得
(20)
将式(17)代入式(19)整理,可得
eq[(m33-m11)uw-Mqq-Mq|q|q|q|-
er[(m11-m22)uv-Nrr-Nr|r|r|r|+
(21)
据式(20),设计如下动力学控制器:
(22)
式中,ki>0(i=u,q,r)为控制器设计参数。
4 稳定性分析
选取Lyapunov函数:
(23)
对式(22)求导,可得
(24)
结合式(12)、式(13)、式(20)和式(21)整理可得
(25)
存在不为0的极小正常数ε,使得当ex和eθ不为0时,有|ex|≫ε,|sineθ|≫ε,即|ex|/(ε+|ex|)≈1,|sineθ|/(ε+|sineθ|)≈1。结合UUV横荡速度v和垂荡速度w均有界,同时考虑余弦函数有性质cos(·)≤1,有
继续整理式(24),可得
(26)

同时借助三角公式sin2(·)=1-cos2(·),以及平方差公式,进一步整理式(25)得
(27)
式中,

(28)
(29)
2kum11-1>0
(30)
2kqm55-1>0
(31)
2krm66-1>0
(32)
(33)
解不等式(26),可得
(34)
即从式(33)可得
(35)
5 仿真分析

期望参考轨迹设定为
(38)
时变海流干扰(慢时变A=0.02,B=0.03,快时变A=2,B=3)设定为
图2为UUV三维轨迹跟踪曲线,由图2可知,航行器能够讯速到达预定轨迹且能够平稳跟踪。图3为UUV跟踪误差,可知航行器跟踪误差收敛迅速,并在期望航向改变较大的时刻迅速做出调整,能够较好地保持收敛状态。

图2 UUV三维轨迹跟踪曲线Fig.2 Curves of UUV three-dimensional trajectory tracking

图3 UUV轨迹跟踪误差曲线Fig.3 Curves of UUV trajectory tracking errors

图4 UUV姿态角度跟踪曲线Fig.4 Curves of UUV attitude angles tracking
图5为姿态误差仿真结果,可知UUV姿态误差收敛讯速,且实际姿态能够根据期望值迅速做出调整,保持良好跟踪状态。

图5 UUV姿态误差曲线Fig.5 Curves of UUV attitude angles errors
图6为UUV线速度u、角速度q和角速度r的仿真曲线,由仿真结果可知,在100 s、300 s、400 s等UUV航向改变较大的时刻,航行器实际速度出现波动,随后快速恢复平稳状态。
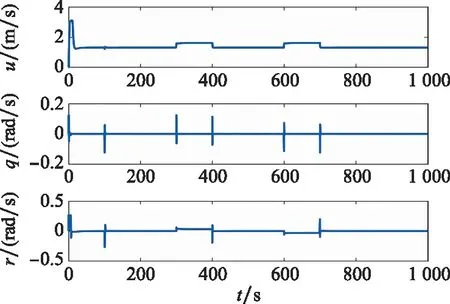
图6 UUV线速度和角速度曲线Fig.6 Curves of UUV linear and angular velocity

图7 控制力和控制力矩曲线Fig.7 Curves of control force and control torque

图8 慢时变海流扰动估测曲线Fig.8 Curves of slow-varying ocean current disturbances estimation
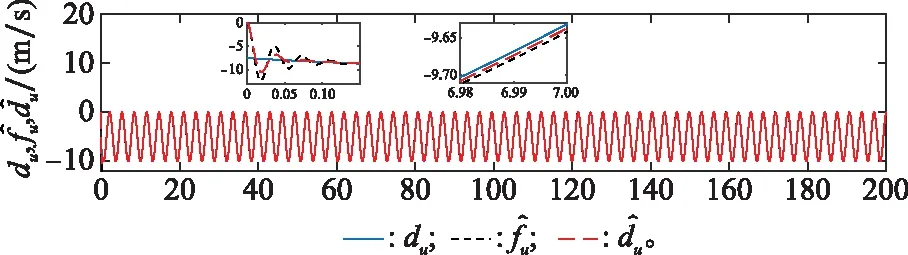

图9 快时变海流扰动估测曲线Fig.9 Curves of fast-varying ocean current disturbances estimation

图10 复合型海流扰动估测曲线Fig.10 Curves of compound ocean current disturbances estimation
6 结 论
针对欠驱动UUV的三维轨迹跟踪控制问题,考虑时变海流扰动的影响,提出了一种UUV的动态面反演轨迹跟踪控制策略。采用反演法设计轨迹跟踪控制器,引入DSC技术以代数运算替代反演法中的微分运算。同时,设计带有动态补偿项的改进型海流观测器,有效地估测出系统存在的时变海流干扰,并基于李雅普诺夫函数证明了闭环系统的所有信号是一致最终有界的。最后,通过仿真验证了所提方法的有效性。文章主要贡献如下:
(1) 对恒定海流观测器进行了改进,设计了一种能有效估测出时变海流干扰的改进型海流扰动观测器;
(2) 结合反演法和动态面技术设计欠驱动UUV的三维轨迹跟踪控制器,同时将设计的改进型海流观测器应用到控制系统设计中,有效地提高了控制系统的抗干扰能力。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
测控技术(2018年2期)2018-12-09
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
上海大中型电机(2017年4期)2017-02-06
广东石油化工学院学报(2016年6期)2016-05-17
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
中国铁道科学(2015年4期)2015-06-21