HMD-VR环境下基于平面辅助物的人机交互系统
2021-06-01 04:38曹力吴小威李琳
北京理工大学学报 2021年5期
曹力,吴小威,李琳,3
(1.合肥工业大学 计算机与信息学院,安徽,合肥 230601; 2.工业安全与应急技术安徽省重点实验室, 安徽,合肥 230009; 3.安全关键工业测控技术教育部工程研究中心,安徽,合肥 230009)
近年来,随着低成本头戴式显示器(head-mouted display,HMD)的出现,沉浸式虚拟现实(virtual reality,VR)设备在普通用户中得以普及. VR环境是一个类似于真实世界的三维空间,其交互方式主要存在导航、选择、操纵和系统控制4种类型[1-2].
导航是指在虚拟环境中将用户从一个地方带到另一个地方. 操纵通常指修改对象的位置和方向. 系统控制主要负责改变系统的交互模式和系统状态.
选择技术是允许用户在虚拟环境中选择一个或多个对象的技术. 在早期的探索中,以虚拟手技术[3]最受欢迎,因为其能够准确地反映手部的动作使得交互精确自然,但其交互范围有限. 为此,Poupyprev等[4]提出了go-go技术来扩大虚拟手在场景中的可达范围. 由于光线投射技术在远距离很难选中目标,Liang等[5]提出了用圆锥光束代替光线的圆锥投射(cone-casting)方法. 但该方法无法消除选择歧义,因此并不适用于密集场景. Mendes等[6]则基于圆锥投射技术,利用迭代细化的方式解决了圆锥投射技术选择的精确度问题,但交互过程过于繁琐. Kopper等[7]使用了一种四菜单细化的SQUAD技术,通过四菜单选项逐步选取目标,但该方法选择效率低且破坏了VR交互的沉浸感. Mingyu KimBong等[8]则考察了凝视交互在VR中的表现并测试了交互过程中用户的眩晕感和疲劳感. 现有的选择技术很难在选择精度和选择范围之间达到较好的平衡.
触觉由于能使用户产生更真实的沉浸感,在交互过程中有着不可替代的作用. 以Htc Vive为代表的手柄可以靠震动来为交互提供触觉反馈,但这种震动产生的反馈并不能让用户感到真实的触觉. Project GROPE[9]在1967年使用机械臂为用户触摸和抓取VR场景中的虚拟对象时提供触觉反馈,但是由于硬件设备的高成本、大尺度和安全问题,导致此类交互系统大多数只能停留在实验阶段. Hinckley等[10]则开创了使用被动道具作为触觉反馈的被动触觉(passive haptic)的概念. 但该方法需要现实世界和虚拟世界的一对一映射,所以给定的物理环境可能不支持所有虚拟场景的交互需求. 而当感官冲突时,视觉占主导地位,Luv Kohli等[11]基于此提出了一种通过扭曲虚拟空间将多个虚拟对象映射到一个物理对象的重定向触摸技术(redirected touching)为交互提供触觉反馈. 而Mahdi Azmandian等[12]则创建了一个用于重新利用被动触觉的框架,称为触觉重定向(haptic retargeting). 该方法通过重复利用用户附近的物理对象,允许单个物理对象为多个不同的虚拟物体提供触觉反馈. Lung-Pan Cheng等[13]基于触觉重定向,使用相同的稀疏触觉代理(sparse hAptic proxy)为不同的场景提供触觉反馈. 但是现有的触觉重定向方法由于重定向距离的原因不支持连续交互.
智能平板是人们已经非常熟悉的交互设备,它使用触摸屏进行导航、选择、操纵和系统控制已经有了成熟的交互范式. 因此,本文希望将平板设备的交互范式应用到HMD环境中,以解决HMD-VR环境下的综合交互问题. Medeiros等[2]在CAVE环境下曾经利用智能平板设备设计了一套交互系统,在导航、选择、操纵和系统控制方面均有很好的表现,但在HMD环境下用户无法看到平板设备并与之交互. 为了在HMD环境下可以直观高效地使用平板设备,本文进行了以下创新工作.
(1)设计了一个平面辅助物的物理对象,使用单深度相机跟踪用户的手部和平面辅助物并分别映射到虚拟场景中. 通过虚拟手与虚拟平面的交互来实现智能平板的交互范式;
(2)为了满足用户在虚拟空间与真实空间触觉一致性的要求,本文提出了一种触觉重定向方法,使得交互操作可以在相邻目标间连续切换,并能有效防止切换时的虚拟手抖动.
1 系统设计
本文设计的HMD-VR交互系统利用平面辅助物将智能平板的交互范式引入到HMD环境中,不仅符合人们的使用习惯,还可以为用户提供虚实一致的触觉反馈,系统设计如图1所示. 平面辅助物可以是任意附有人工标记的平面对象,如图2所示. 小型深度相机安装在HMD前方、并向下倾斜15°左右,消除由于深度相机和用户眼睛之间的位置差异带来的视觉差异.

图1 交互系统的组成Fig.1 Components of the interaction system

图2 平面辅助物Fig.2 The planar-aid
由于HMD-VR环境下,用户无法看到物理场景中的手和平面辅助物,导致难以进行位置准确的交互行为. 因此本文通过深度相机Cam来跟踪Pp(平面辅助物,位置以pp表示)和Hp(用户右手,位置以hp表示,本文中用户用左手拿起Pp,用右手与虚拟平面上的按钮交互),并分别映射到虚拟场景成为Hv(虚拟手,位置以hv表示)和Pt(虚拟平面,位置以pt表示),如图3所示.
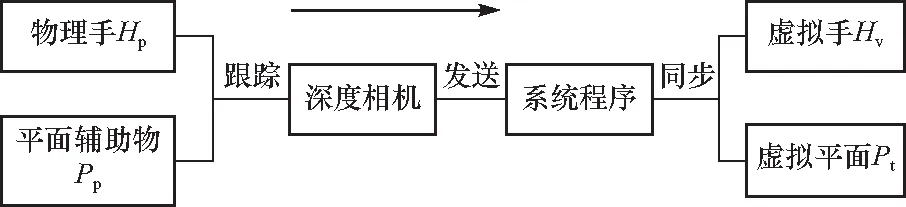
图3 Hp和Pp的跟踪和同步Fig.3 Tracking and synchronizing Hp and Pp
如图4和图5所示,本文同步了Pp和Pt的位置,并且利用渲染到纹理技术将用户前方的场景映射到Pt上作为第二视角. 如此,既方便用户与场景的交互,又避免了Pt对场景的遮挡.
根据具体的虚拟现实应用,用户可以选择站立或坐着使用该系统,不建议进行较大范围的晃动或走动,以避免设备发生较大偏移导致映射失败,这与智能平板的用户使用要求亦是一致的.
将智能平板交互范式引入HMD-VR环境的核心问题在于虚实一致,故本文采用了位置跟踪和触觉重定向技术达成这一目标,并针对需求进行了改进与优化.

图4 物理场景中用户拿起平面辅助物Fig.4 The user picks up the planar-aid in physical scene

图5 虚拟场景中的虚拟平面Fig.5 The virtual plane in virtual scene
2 位置跟踪
在虚实注册领域,很多学者已经取得了不错的进展. 其中,基于标识的注册方法是在场景中放置人工标识,对该标识进行识别和跟踪[14]. 通过跟踪和绘制虚拟手,LeapMotion可以与VR中的虚拟物体交互. 但是由于无法提供触觉反馈,LeapMotion交互的沉浸感并不高. 因此LeapMotion常用来恢复手部姿态和获取手部位置[15]. 本文采用了文献[14]中的人工标识方法追踪平面辅助物,利用文献[15]的方法恢复手部姿态和捕获手的位置.
2.1 空间映射
本文通过位于Oc点的Cam跟踪Pp的位置,如图6所示.

图6 空间映射Fig.6 Space mapping
Pp位于深度相机坐标系下,其位置坐标为pp(x,y,z),Pt位于虚拟场景中的世界坐标系下,其位置坐标为pt(x0,y0,z0). 由于Pp和Pt处于不同坐标系,故需要通过坐标系变换矩阵M将pp转换为世界坐标系下,然后通过过渡矩阵M1消除Pp和Pt在同一坐标系下的位置差异,同步pp和pt的位置.其中
过程如式(1)所示.
pt′=pp′MM1
(1)
其中pt′、pp′为pt、pp的齐次坐标描述。通过Cam,跟踪到了Hp的位置hp,由于Hp和Pt处于不同坐标系,同理可通过坐标系变换矩阵M′和过渡矩阵M1进行如下变换:
(2)
其中,pt′、hp′分别为pt、hp的齐次坐标描述。由式(1)和(2)可知,Pp、Hp可通过坐标变换与Pt处于同一交互空间.
2.2 误差补偿
本文因为采用了不同的方法采集手和平面辅助物的位置信息,因此虚拟手与虚拟平面位置之间存在初始误差. 位置上的差异会引起虚实不一致,影响用户的交互体验,降低沉浸感.
因此,本文提出一种校准算法消除初始误差,算法如下.
算法1初始误差校准算法
输入:hp、pp-右手和平面辅助物的位置信息
输出:pt-正确的虚拟平面位置
Step 1:用户拿起Pp后通过人工标识跟踪其位置信息pp
Step 2:将右手展开,掌心部位贴放在Pp中心处,此时Cam捕获到的Hp的位置hp可以作为Pp的精确位置
Step 3:计算出初始误差Offset =hp-pp,生成持久化数据
Step 4:pp经过误差补偿后作为Pt的位置pt,即:pt=pp+Offset
3 触觉重定向
智能平板的唯一交互方式就是手部接触,触觉与视觉的高度统一是高效交互的保证. 在本系统中用户接触的对象为辅助物平板Pp,其映射物为虚拟平面Pt. 在HDM-VR环境下,用户的直觉操作目标是虚拟平面Pt,故在虚拟世界中不希望Pt尺寸过小影响交互的效率和准确性,在真实空间中则不希望Pp尺寸过大给用户带来负担. 因此,如图7所示,Pp和Pt之间存在一定尺寸差异,在交互时可能会出现Hp探出Pp边界以外而无法获得触觉反馈的情况. 本文使用触觉重定向技术[12]解决Pp和Pt的尺寸差异造成的位置上和触觉上的不一致,并为用户的交互提供实时的触觉反馈.

图7 Pp和Pt的尺寸差异Fig.7 The size difference between Pp and Pt
3.1 重定向目标的选择方法
触觉重定向有两个先决条件,即必须先确定Pr(物理目标,位置以pr表示)和Pv(虚拟目标,位置以pv表示)的位置.Pr始终位于Pp范围内,Pv则必须由用户自己选择. 因此,为了让用户能够自由地选择重定向目标,本文设计了一种重定向目标选择方法,允许用户使用凝视和手部动作来选择重定向目标.
本文使用如图8所示的状态机来协助用户选择重定向目标. 用户的3种状态切换如下.
(a) 寻找目标状态:用户观察虚拟平面Pt,寻找Pt上想要交互的功能按钮Bi={b1,b2,b3,…,bn},此时判断凝视时间是否达到阈值t(时间阈值,本文中t值设为2 s,以适应一般用户的行为习惯),如果是进入(b),
(b) 凝视状态:判断用户右手Hp是否抬起到指定高度H(高度阈值,本文中H值初步设为100 cm,H值可灵活调整,以适应用户身高),如果是进入(c),
(c) 确定目标状态:确定重定向目标Pv=Bi,当交互完成时返回(a).

图8 重定向目标选择状态机Fig.8 State machine for selecting haptic retargeting objects
3.2 重定向算法
图9说明了触觉重定向的具体过程. 虚拟手

图9 重定向过程中Hp和Hv的位置变化Fig.9 Positions of Hp and Hv in the process of haptic retargeting
Hv和物理手Hp最初均位于H0处(本文把确定重定向目标的瞬间用户右手Hp的位置作为H0,在一次重定向过程中其位置不变),在虚拟手Hv移向Pv过程中,重定向算法逐渐使得虚拟手Hv朝着Hp远离物理目标Pr的方向上偏移. 在VR场景中视觉占主导地位,Hv移动方向上的偏移会诱导用户的物理手Hp移向物理目标Pr来校正Hv的移动轨迹. 最终,当Hp触碰到Pr时虚拟手Hv抵达Pv.
触觉重定向过程需要获取手的初始位置H0、Pv的位置pv和Pr的位置pr,具体重定向的过程如下.
假设应将虚拟场景点pv映射到物理场景点pr,此时计算总偏移量T,
T=pv-pr
(3)
当Hp开始从初始位置H0向Pv移动时,偏移量T逐渐被加到虚拟手的位置hv上,即
α=Ds/(Ds+Dp)
(4)
W=αT
(5)
hv=hv+W
(6)
α为位移比,范围从0~1,Hp位于H0时为0,当物理手Hp到达物理目标Pr时为1,其中Ds=|hp-H0|,Dp=|hp-pr|.
然而,利用重定向技术为本文的交互系统提供触觉反馈还存在以下问题:首先,切换重定向目标时虚拟手会有明显的抖动现象. 这不仅会给用户带来视觉上的冲突,更会破坏交互的沉浸感;其次,触觉重定向在没有足够重定向距离时不适合与相邻目标连续交互. 这不仅会降低交互的效率,更会降低交互体验. 本文针对以上两个问题,提出了下述解决方案.
3.3 虚拟手抖动现象的优化方法
用户在交互期间可能在虚拟手Hv已被加上一定偏移量的情况下,做出切换重定向目标的决定. 由公式(3)(5)(6)可知,重定向目标Pv改变,则总偏移量T改变,W会瞬间改变. 此时虚拟手Hv会发生明显的抖动. 为了解决上述问题,本文提出了以下方法.
算法2虚拟手抖动优化算法
输入:hp、hv、pv-右手和虚拟目标的位置信息
输出:W-帧间平滑的虚拟手位置偏移量
Step 1:用向量Wt保存当前hp与hv的位置偏移量Wt=hp-hv,初始时Wt=Vector3(0,0,0)
Step 2:确定重定向目标Pv后计算总偏移量,即:T=pv-pr
Step 3:计算实时偏移量W=αT+(1-α)Wt,W作为Hv的位置增量,hv=hv+W
Step 4:用户选择新的虚拟目标PvN时将当前W存入Wt中,Wt=W,记PvN位置为pvN
Step 5:计算当前总偏移量T′=pvN-pr
Step 6:用户将Hv移向Pv过程中,计算W=αT′ +(1-α)Wt,W作为Hv的位置增量,hv=hv+W
Step 7:完成交互后,Wt=Vector3(0,0,0)
Step 8:重复上述Step1~Step7
为了验证提出的重定向算法的可行性、正确性,本文分别使用了文献[12]和本文的算法在交互期间切换重定向目标,并记录了切换前后的5帧内虚拟手Hv的位置坐标和连续帧画面,对比两种重定向算法的实际表现,如表1所示.

表 1 虚拟手坐标Tab. 1 Positions of virtual hand
表1中坐标单位均为m,两种算法均在第3帧将重定向目标由视角缩小按钮切换为视角放大按钮. 并且为了方便观察和对比,此处及本文后续部分均以垂直角度展示虚拟平面及其内容. 从表1可以看出,文献[12]的重定向算法在切换目标前后虚拟手的位置变化并不平滑,经计算第2与第3帧之间出现了7.62 cm的虚拟手抖动幅度. 而本文的重定向算法在切换重定向目标前后虚拟手的位置变化平滑,有效地解决了切换重定向目标时虚拟手的抖动问题.
3.4 相邻目标连续交互方法
触觉重定向技术由于其算法设计上的缺陷无法与相邻目标连续交互. 若一次交互完成时立即切换重定向目标,则Hp和Pp之间没有足够的重定向距离,此时重定向过程中Hp和Hv的移动速度差异过大,会造成用户感官上的强烈冲突. 而在智能平板的交互范式中,为了保证用户的交互效率,功能按钮之间皆彼此相邻. 因此,为了适应智能平板的交互范式,本文提出了一种基于触觉重定向的相邻目标连续交互方法.
算法3相邻目标连续交互算法
输入:hp、hv、pv-右手和虚拟目标的位置信息
输出:W-正确的虚拟手位置偏移量
Step 1:用户确定重定向目标Pv后,用向量P0保存当前Pv的位置pv,即P0=pv
Step 2:当交互完成后,用户切换Pv时用Wh保存此时刻Hp与Hv的位置偏移量,Wh=hp-hv
Step 3:用向量HpC保存用户切换Pv时刻Hp的位置,HpC=hp
Step 4:用向量P1保存新的PvN位置pvN,P1=pvN
Step 5:计算P0和P1的距离d,d=|P0-P1|,如果距离d小于D(本实验中D的值为5cm),则判断为相邻物体,进入(Step 6),否则进入(Step 7)
Step 6:计算偏移量W=Wh+(hp-HpC),作为Hv的位置增量,hv=hv+W
Step 7:计算实时偏移量W=αT+(1-α)Wt,作为Hv的位置增量,hv=hv+W
Step 8:重复上述Step 1~Step 7
4 交互实验与分析
实验环境为Window10x64,Unity3D引擎2018.2.0(64bit),硬件平台为Intel(R) Core(TM) i7-7770,内存16GB,NVIDIA GeFoce1070 GTX显卡. 采用的头戴式虚拟现实设备(HMD)是应用最为广泛的HTC Vive,采用LeapMotion作为跟踪手和平面辅助物的深度相机. 平面辅助物的尺寸为15 cm×20 cm,对应的虚拟平面的尺寸为18 cm×30 cm.
4.1 实验设计与准备
为了符合人们使用智能平板的习惯,本文设计了一个三维场景及交互界面,可以实现导航、选择、操纵和系统控制功能,如图10所示. 可以看到在平板上的交互对象皆为相邻对象,此情况下文献[12]的触觉重定向方法无法顺利完成交互.

图10 用户交互界面Fig.10 The user interface of interaction
系统控制功能:用户可以通过主界面上的系统控制功能切换交互模式和使用其他系统命令.
导航功能:用户可以在导航模式下可以使用箭头按钮在场景内自由移动.
选择功能:在选择模式下,用户可以使用轮盘控制虚拟平面上的视角,在右下角滑动手指进行视角的缩放,寻找到目标后点击目标完成选中操作,此时目标处于高亮状态,如图10(c)所示.
操纵功能:用户选中目标后进入操纵模式. 用户可以使用轮盘移动目标,使用右下角按钮绕任意轴上旋转目标,在一定范围内对目标的位置和角度进行精确调整.
为了测试本文交互系统的具体交互表现,本实验邀请了20名年龄分布在20~25岁的志愿者来进行交互系统的任务测试,并在测试后给予一定酬劳. 他们中既有不熟悉VR交互环境的一般参与者,也有了解VR交互的研究人员,但毫无疑问他们都非常熟悉智能平板设备的交互方式. 测试过程分为以下3个阶段:①介绍交互系统的基本使用方法;②介绍具体测试任务;③开始任务测试.
为了测试本文交互系统在中远距离大场景中的综合交互能力,参与者需在如图11所示40 m×40 m大小的虚拟场景中依次完成导航(Navigation,Nav)、选择(Selection,Sel)和操纵(Manipulation,Ma)功能的测试,测试期间交互模式的切换由系统控制功能提供. 参与者需要从图11中所示的初始位置Pos0依次移动到指定位置Pos1和Pos2. 如图12所示,Pos2附近预先放置了3个大小和形状均不同的目标物体T1,T2,T3,参与者需要依次选中3个目标,之后需要分别将目标移动到指定位置PosM1,PosM2,PosM3并绕Y轴旋转180°. 若导航时偏移指定点2 m以上,或选择时连续两次未选中,或操纵时未移动到指定位置,或旋转角度误差达到20°以上均定义为交互失败. 实验记录下每位参与者分别在导航、选择和操纵过程中完成任务的时间和失败次数. 本实验中,Pos0~Pos1的距离S1为21.7 m,Pos1~Pos2的距离S2为9.7 m,T1~PosM1的距离d1为9.06 m,T2~PosM2的距离d2为8.34 m,T3~PosM1的距离d3为2.17 m,导航模式下导航速度为0.1 m/frame.

图11 实验主场景Fig.11 The main scene for tests

图12 交互目标Fig.12 The interaction objects
4.2 本文交互系统与智能平板交互的一致性验证
本文的交互系统在平面辅助物为交互提供实时触觉反馈的情况下,用户与虚拟平面的交互方式可以完全与智能平板的操作方式相一致,符合智能平板的交互习惯. 为了验证本文交互系统(planar-aid interaction,PAI)与智能平板交互(tablet interaction,TI)的一致性,本实验采用了真实智能平板做了对比实验. 本文将实验场景完整地移植到智能平板设备(型号:华为荣耀Play,Android8.0),并为其设计了相同的交互系统. 本实验先让20名参与者使用本文交互系统在HMD环境下完成任务测试并记录相关数据. 适当休息后,让20名参与者在现实场景中直接使用智能平板完成相同的测试任务并记录相关数据,结果如图13所示.
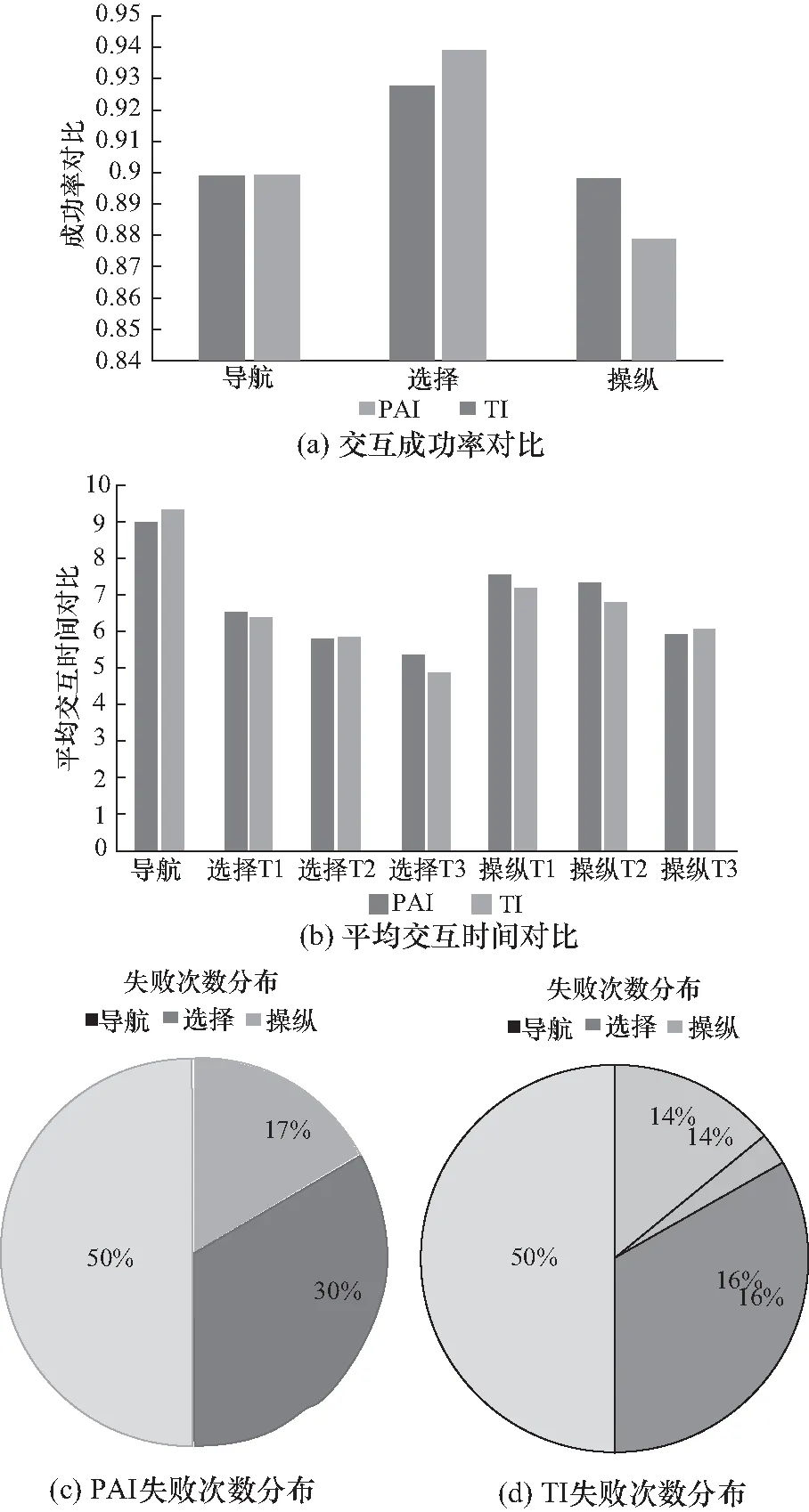
图13 实验结果统计与分析Fig.13 Statistics and analysis of tests
从交互的成功率上看,PAI和TI的交互成功率都很高. PAI和TI的交互失败次数相仿且主要集中在操作步骤繁琐的选择和操纵过程. 因为PAI和TI具有相同交互范式,所以失败情况有相似的分布.
从完成任务所需时间上来看,PAI和TI在完成导航、选择和操纵的平均时间均十分接近. 且PAI交互系统中选择和操纵的交互时间均呈现递减的规律,前者是因为初始视角位于Pos2处,交互刚开始要花费更多的时间调整视角;后者是因为目标在到达指定位置的距离上d1>d2>d3造成的,而这一点在TI交互系统中也得到了相同的体现.
由此可见,本文的触觉重定向方法对相邻物体的连续交互有很好的支持,使得本文交互系统更加接近智能平板的交互效率. 因此本文交互系统和智能平板在完成交互任务的表现上具有一致性.
4.3 对比实验
为了测试本文交互系统在中远距离大场景下的具体交互表现,本文也与另外两种交互系统作了对比实验,分别是虚拟现实应用市场上使用最为广泛的Htc vive手柄交互系统(ray-casting interaction,RI),以及控制杆+凝视的交互系统(gaze interaction,GI).
在RI交互系统中,以点到点的跳跃形式进行导航,通过射线进行目标选择,通过近距离接触式抓取进行操纵,由手柄上的按钮执行系统控制. GI交互系统中,由控制杆进行导航和操纵,凝视时间达到阈值后完成选择操作,通过控制杆上的按钮执行系统控制. 本实验中,控制杆的导航速度和本文交互系统保持一致,为0.1 m/frame,而凝视时间阈值设置为2 s.
本实验让20名参与者分别使用以上两种交互系统完成测试任务并记录相关数据. 为了防止疲劳累积,参与者使用一种交互系统完成任务后便休息5 min. 本文统计了PAI、GI和RI 3种交互系统完成任务花费的时间和失败情况,统计结果如图14和表2所示.
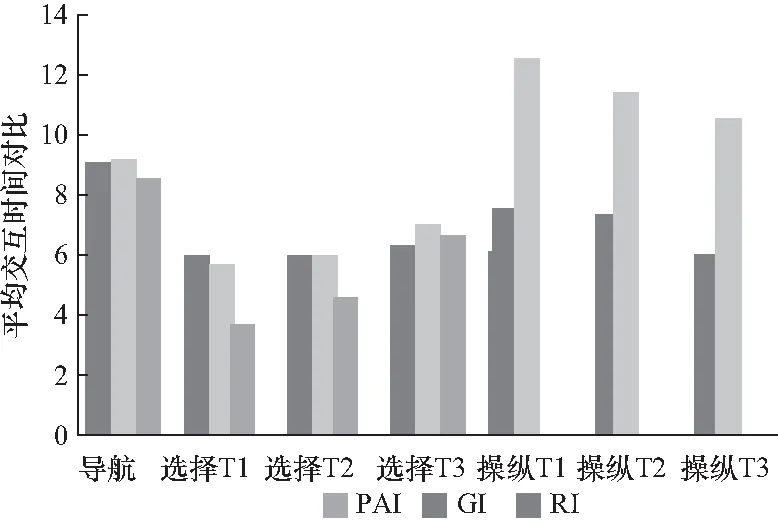
图14 平均交互时间对比Fig.14 Comparison of average interaction time

表2 交互失败次数统计Tab. 2 Statistics of interaction failures
由图15可知,在导航时间上PAI、GI和RI的表现没有较大的差异,平均导航时间均在9 s左右. 在选择任务上,本文发现GI和RI花费的时间呈上升趋势,而且在T1和T2上的选择时间上小于PAI,却在T3的选择时间上大于PAI. 本实验中,因为T1、T2和T3的尺寸递减,根据费茨定律(Fitts′law)[16],交互的时间与目标的截面大小有关,面积越大花费的时间越少,因此GI和RI容易受目标尺寸影响,且以RI交互系统受到的影响最为明显. 而对于PAI,选择时间虽然也一定程度受到目标尺寸的影响,但并没有GI和RI明显. 因此,在中远距离场景中,GI和RI在大尺寸目标的选择表现上占优,而在小尺寸目标的选择上PAI的表现要更加优秀.
在操纵方面,本文发现PAI操纵目标花费的时间远小于GI. 通过平面辅助物引入智能平板的交互范式,PAI可以方便快速地移动和旋转物体,在短时间内完成操纵任务. GI由于操作复杂、繁琐所以需要更长的时间. 而RI则由于无法精确移动和操纵物体,因此无法完成本实验中的操纵任务.
受目标尺寸影响的不仅仅是交互时间,还有交互的成功率. 如图15所示,本文统计了交互失败的次数,其中RI和GI的失败次数要明显高于PAI. 而且,由表2可知交互失败次数主要集中在GI和RI对T3的选择上. 一方面由于T3截面太小,导致GI和RI很难选中;一方面是因为T1和T3之间存在遮挡. GI和RI无法很好地处理遮挡问题,直接降低了两者对T3的选择成功率. 而对于PAI来说,由于可以视角可以穿过遮挡物体,选择的成功率未受遮挡问题影响.

图15 交互失败次数及分布Fig.15 Statistics of interaction failures and distribution
从交互表现而言,本文交互系统通过平面辅助物引入智能平板的交互范式,在中远距离VR大场景下可以更好地满足用户的交互需求,提供高效地导航、选择、操纵和系统控制.
从交互体验而言,对于未引入平面辅助物的GI和RI,因为无法为交互提供触觉反馈,因此交互的沉浸感并不高. 而引入了平面辅助物的PAI交互方式,不仅提升了交互能力,且得益于实时的触觉反馈,交互的沉浸感得到很大提升.
4.4 用户问卷调查
本调查问卷旨在了解参与者对以上3种交互方式的感受和体验,问卷主要包含以下陈述.
S1:使用本交互方式完成任务的过程中我感到头晕,恶心;
S2:使用本交互方式让我体验到高度的沉浸感;
S3:使用本交互方式可以满足我的交互需求;
S4:使用本交互方式让我感到很疲劳.
对于以上陈述,参与者从1~5五个分段中给出自己的评分,1分代表完全不同意,5分代表完全同意,各交互方式的平均得分结果如图16所示.

图16 调查问卷结果Fig.16 Results of the questionnaire
由图16统计结果可以发现在眩晕感和疲劳感方面,参与者普遍认为GI带来了严重的眩晕感和不适感. 因为需要频繁控制视角来切换交互目标和维持视点不动来完成交互,GI不仅让参与者感到晕眩,也会带来更多疲劳. RI则因为在中近距离交互方便快捷,参与者无明显异样感受. 而PAI则因为交互操作可以在虚拟平面上轻松完成,符合人们使用智能平板的习惯,无明显眩晕感和疲劳感.
在交互能力方面,PAI和GI均可以满足用户的交互任务. 但可以发现参与者普遍认为RI的综合交互能力较弱. 虽然RI在中近距离交互方便快捷,但是RI无法操纵物体以及在远距离目标选择上存在一定困难. 在沉浸感方面,参与者普遍认为GI和RI交互体验的沉浸感较低. 因为GI和RI交互没有触觉反馈,因此交互感受不够真实、自然. 而PAI由于为交互提供了真实的触觉反馈,具有很强的沉浸感和较好的交互体验.
5 结 论
目前,利用平面辅助物将智能平板的交互范式引入到虚拟场景并利用触觉重定向技术提供触觉反馈的VR交互方案是十分新颖的. 本文的交互系统保证了较高的交互效率,并提高了用户的沉浸感和交互体验,很好地解决了VR大场景下中远距离的综合交互问题. 本文对触觉重定向的相关算法进行了改进,解决了切换重定向目标时虚拟手的抖动问题;并且本文针对触觉重定向存在的缺陷提出了相邻目标连续交互方法,提高了交互的灵活性和交互效率.
本文方法在VR大场景下中远距离交互上有着很好的表现,且交互效率和交互体验不会受遮挡问题影响,但重定向目标的选择方法不够自然. 未来,希望能够通过检测用户手部的运动轨迹准确预测用户的交互意图,进一步提升用户的交互体验.
猜你喜欢
海外星云(2021年6期)2021-10-14
数学大王·中高年级(2021年4期)2021-04-27
科学大众·小诺贝尔(2020年4期)2020-07-20
中学生数理化·高三版(2019年1期)2019-07-03
中学生数理化·高三版(2019年1期)2019-07-03
红豆(2017年4期)2017-04-13
试题与研究·高考数学(2016年1期)2016-10-13
CHIP新电脑(2016年7期)2016-07-18
电脑爱好者(2015年17期)2015-09-10
疯狂英语·口语版(2013年7期)2013-08-01