
无人机三维激光扫描技术在大红山铁矿的应用
2021-06-02 00:59李杰林张孝平杨承业李长军
现代矿业 2021年3期
郭 庆 张 玮 李杰林 李 彧 张孝平 杨承业 李长军
(1.玉溪大红山矿业有限公司;2.中南大学资源与安全工程学院;3.天河道云(北京)科技有限公司)
玉溪大红山矿业有限公司大红山铁矿属缓倾斜条带状厚大矿床,矿体埋藏较深并呈多层产出,且矿岩坚硬、地温高、采矿技术条件复杂、回采难度大。经过多年的开采,大红山铁矿井下形成了大量的大型采空区,同时还遗留了大量的残矿资源,为推进大红山铁矿井下残矿与低品位资源高效回收利用与采空区安全协同治理,亟需对井下采空区开展精准探测[1]。
为精确掌握大红山铁矿采空区现状,对大红山铁矿Ⅱ-1 头部区域的系列采空区开展三维激光测量作业。目前,在II-1 头部区域已探明采空区数量多达21 个,采空区累计体积高达73 万m3。但是,在Ⅱ-1 头部主矿体开展的三维激光扫描测量作业中,主要采用架站式、手持式等传统三维激光扫描方式对采空区进行测量,在一定程度上受限于空区形态与赋存位置,致使部分空区无法得到全面的扫描结果,所收集的采空区点云数据存在部分失真现象。
近年来,无人机在探测领域中的运用愈发广泛[2-4],通过引进无人机三维激光扫描技术,对大红山铁矿井下II-1 头部的部分采空区开展三维激光扫描的补测工作,并进一步完善采空区三维激光扫描的点云数据,从而构建出精确可靠的采空区实测模型。
1 无人机三维激光扫描系统组成
本研究所使用的无人机三维激光扫描系统由无人机平台与机载便携式三维激光扫描仪所组成,如图1所示。

无人机平台采用大疆经纬M600无人机,M600无人机采用模块化设计,装配及使用快速便捷,且具备高效的动力系统;M600集成全新专业级A3飞行控制系统,并采用正弦驱动技术的智能电调,提供高效、可靠、精准的飞行性能以及内置飞行参数自适应功能,能够实现不同负载下的参数免调,便捷易用;A3飞行控制系统具有优秀的外置扩展平台,能很好地兼容外置三维激光扫描仪。
机载便携式三维激光扫描仪采用翼目神HM100轻型三维激光扫描仪,该扫描仪所配置的激光雷达最大测距可达100 m,每秒可收集30 万个点云数据,能够快速获取被扫描物体表面点云的位置、强度、环数等参数;通过机载三维激光扫描仪的高精度惯性制导系统可实时获取无人机的飞行速度、飞行姿态以及飞行轨迹,同时结合设备自主避障功能[5],实现井下无GPS信号条件的飞行测量。
通过无人机平台与便携式三维激光扫描仪的二者集成,构成无人机三维激光扫描系统,无人机与机载三维扫描仪之间可自由拆卸、安装,以方便井下工作时设备的携带与运输。
2 工程应用
2.1 无人机三维激光扫描作业研究对象
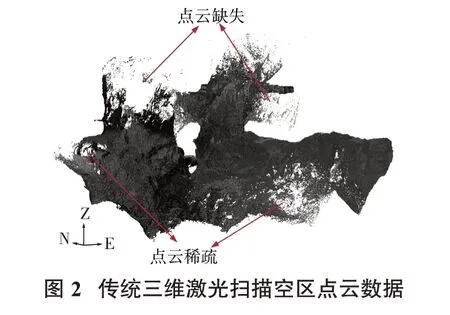
以大红山铁矿Ⅱ-1 矿体头部的775-1 采空区为研究对象,开展无人机三维激光扫描技术在采空区探测的工程应用研究。775-1采空区主要赋存于Ⅱ-1 矿体头部的775 m 中段,775-1 采空区体积高达44万m3,空区形态复杂,且采空区部分区域已经塌陷,导致相连巷道大部分区域被落石封堵,前期采用传统三维激光扫描方式所获取的775-1 采空区数据如图2所示。
受采空区形貌影响以及探测条件的限制,传统三维激光扫描方式无法对775-1 采空区开展全面测量,导致空区西北角与空区底部区域的点云数据较为稀疏;此外,由于空区顶板部分塌陷,使得775-1采空区上部分联通巷道被落石封堵,无法开展具体的三维激光扫描工作,使得空区顶部区域点云数据存在缺失。
上述点云数据的失真将影响后续空区实测模型构建的可靠性,因此采用无人机三维激光扫描技术对775-1采空区进行测量。无人机在775-1采空区1#探测作业点与2#探测作业点进行采空区探测作业,如图3所示。

2.2 无人机三维激光扫描作业流程
无人机三维激光扫描作业流程如图4所示,通过在1#探测作业点与2#探测作业点开展无人机三维激光扫描作业,将所获取的775-1采空区点云数据导入配套的Pointstudio8.0软件中,在软件中开展点云的处理工作[6],最后构建出775-1 采空区的实测点云模型与实体模型。
2.3 无人机三维激光扫描模型构建

经过无人机三维激光扫描的775-1 采空区点云数据如图5所示。可以看出,无人机三维激光扫描技术弥补了775-1 空区西北角与空区底部不完整的点云数据,所获取的空区点云数据量更丰富、数据表征更全面,且利用无人机灵活测量的优势,对无法开展传统三维激光扫描的区域进行测量,填补了采空区顶部点云数据的空缺,从而更好地展现775-1采空区的真实形貌。最后,根据无人机构建出775-1采空区的实体模型,如图6所示。


3 结论
精确探测采空区形貌是开展采空区治理的重要前提,无人机三维激光扫描技术能很好地扫描采空区“死角”,结合其他扫描设备能全面、精确地展现采空区真实形态;采用无人机三维激光扫描技术,操作人员无需接近采空区,能高效、安全地开展采空区作业。综上所述,无人机三维激光扫描技术在地下矿山采空区探测中具有很好的应用与推广价值。
猜你喜欢
中国铁道科学(2022年3期)2022-06-09
露天采矿技术(2022年1期)2022-02-20
海峡科学(2021年9期)2021-11-13
中国电气工程学报(2020年19期)2020-12-28
农家科技下旬刊(2019年8期)2019-10-08
模具制造(2019年3期)2019-06-06
采矿技术(2018年3期)2018-05-30
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
地质力学学报(2014年3期)2014-12-11
