多馈入交互作用因子MIIF计算方法比较
2021-06-09 07:03毛晓明周忠健
电工电能新技术 2021年5期
毛晓明, 何 炜, 周忠健
(广东工业大学自动化学院, 广东 广州 510006)
1 引言
高压直流(High Voltage Direct Current, HVDC)输电系统传输容量大,功率调节迅速灵活,输电距离不受同步运行的稳定性限制,在远距离大容量输电和大区电网互联方面具有独特优势[1,2]。随着“西电东送”和“全国联网”战略的实施与深化,我国主要的负荷中心长江三角洲和珠江三角洲地区已形成多回直流集中馈入的局面[3-7]。
研究表明,多馈入直流输电系统间存在着相互作用,对馈入电网的稳态和动态特性有深刻的影响。为此,国际大电网会议BW G4工作组在文献[8]中提出多馈入交互作用因子(Multi-Infeed Interaction Factor, MIIF)的概念,用于量化多馈入直流输电系统间的相互作用强弱。根据文献[8]给出的定义式计算MIIF需要进行暂态仿真,虽然实现简单,但对结果的解析性较差,无法预见电网结构、运行条件变化对MIIF的影响。针对这一不足,学术界提出一系列MIIF解析计算方法[9-14],这些方法可以分为三类,分别是阻抗比值法[9]、基于潮流雅可比矩阵的灵敏度法[10-12]和考虑直流小扰动特性的阻抗比值法[13,14]。方便起见,后文将上述3类解析法分别简称为“阻抗法”、“灵敏度法”和“考虑直流外特性的阻抗法”。
“阻抗法”利用节点阻抗矩阵元素计算MIIF[9]。“灵敏度法”从潮流雅可比矩阵中提取V/Q灵敏度,再计算MIIF[10-12]。“考虑直流外特性的阻抗法”用小扰动下直流系统的等效附加导纳修正节点阻抗矩阵,再用阻抗法计算MIIF[13,14]。已有的研究在等值小系统中以时域仿真法为基准验证了解析法的有效性,存在以下不足:①没有交代时域仿真法的计算条件,因此结论的有效性值得商榷;②没有在较大规模系统中对算法的性能进行测试和评估。
本文首先回顾MIIF的定义,然后对各类算法进行理论剖析,接着以两馈入4节点系统和三馈入36节点系统为平台,对几类算法的性能进行更深入的比较,阐述在较大规模电网中应用阻抗法的注意事项,明确各类计算方法的优势、不足和适应性,为不同的应用场景推荐合适的方法。文献[10]与文献[11,12]分别假设电网中注入无功功率时节点有功不变化和节点相角不变化。考虑到高压电网中PQ基本解耦,上述两种假设都是合理的,因此文献[10-12]所提灵敏度法的性能并无明显差异,本文选择文献[11,12]所提方法为灵敏度法的代表。文献[14]推导的“考虑直流外特性的阻抗法”比文献[13]简洁,本文选择文献[14]所提方法为“考虑直流外特性的阻抗法”的代表。
本文主要介绍MIIF的定义,从理论上分析其影响因素;描述4种MIIF典型计算方法的原理;对阻抗法进行改进;同时对各种计算方法进行比较和分析评价。
2 MIIF的定义及分析
MIIF的定义为:在换流母线i上投入对称三相电抗器,使得该母线电压跌落1%时,换流母线j的电压变化率[8],即:
(1)
式中,Ui0为 投入电抗器前母线i的电压;ΔUj为母线j的电压变化。显然,MIIF的取值范围为0~1,MIIF越大,表示两个换流站之间的相互作用越强。
由定义,当受扰直流i电压跌落1%时,另一直流j电压跌落越大,则MIIF越大。由此可得:
(1)拓扑是影响MIIF的重要因素。换流母线之间的电气距离越远,MIIF越小。
(2)直流控制方式是影响MIIF的重要因素。以直流整流侧常见的定直流电流(定I)和定直流功率(定P)控制方式为例。受扰后,当交流电压降低时,定I控制方式下直流传输功率下降,无功消耗相应减小,阻碍电压进一步下降,因此与定P控制方式相比,直流采取定I控制时MIIF较小。
(3)有利于电网电压稳定的技术措施都能减小MIIF。发电机励磁、静止无功补偿器(Static VAR Compensator, SVC)和静止同步补偿器(Static Synchronous Compensator, STATCOM)等动态无功调节设备能稳定系统的电压,因此它们有助于减小MIIF。
(4)负荷特性对MIIF有重要影响。以静态ZIP负荷为例,恒阻抗(恒Z)负荷最有利于电压稳定;恒功率(恒P)负荷最不利于电压稳定;恒电流(恒I)负荷界于二者之间。因此,负荷采用恒Z模型时,MIIF的数值较小;采用恒P模型时,MIIF的数值较大。
综上,MIIF是一个受网络拓扑和运行因素影响的技术指标。
3 MIIF的计算方法
3.1 时域仿真法
对运行人员而言,根据定义借助电力系统计算分析程序(如PSD-BPA、PSASP等)计算MIIF是最为方便的。根据本文的测试,只要扰动较小,MIIF的计算结果是比较稳定的,无需拘泥于受扰母线的电压变化恰好为1%这一限制。不过,通过时域仿真得到的MIIF是一个实验性指标,缺乏清晰的物理解释。
3.2 阻抗法
文献[9]指出,多馈入交互作用因子MIIF的大小与换流母线处投入的对称三相电抗器的大小无关,只与受端交流系统的参数有关,换流母线电压变化之比等于换流母线对应节点的互阻抗与自阻抗的比值,即:
(2)
式中,i和j为换流母线;Zji和Zii为系统节点阻抗矩阵的元素。
根据式(2)计算MIIF十分方便。然而,应用中不难发现,如果使用电力系统潮流计算所用系统节点导纳(阻抗)矩阵去计算MIIF,结果并不正确。因此,文献[11,12]认为该方法只适用于保留直流换流母线节点得到的交流等值网络。实际上,阻抗法不仅适用于标准等值网络,只要稍做改进,也可直接应用于大电网,从而省去复杂的网络化简过程,第4节详细阐述。
3.3 灵敏度法
灵敏度法借助交直流系统潮流雅可比矩阵元素计算MIIF。交直流系统潮流方程为:
(3)

假设Δδ=0,式(3)变为[11,12]:
(4)
由式(4),MIIF的计算公式为:
(5)
灵敏度法的计算量比阻抗法大,但能考虑直流控制方式对MIIF的影响。
3.4 考虑直流外特性的阻抗法
文献[14]提出的“考虑直流外特性的阻抗法”先计算直流在不同控制方式下的等效附加导纳YΔ,再利用YΔ修正交流系统的节点导纳矩阵,最后经矩阵求逆得到阻抗矩阵后按式(2)计算MIIF。值得指出,这里计入YΔ前的节点导纳矩阵仍应为第4节所述降维节点导纳矩阵。可见,本方法的关键在于计算直流等效附加导纳YΔ。
当直流系统处于I/γ控制方式时,YΔ的计算公式为:
(6)

当直流系统处于P/γ控制方式时,YΔ的计算公式为:
(7)


其他控制方式对应的计算公式在此不赘述。与灵敏度法类似,本方法的计算量也比阻抗法大,但考虑了直流控制方式对MIIF的影响。
4 阻抗法的改进
如前所述,目前在大电网中使用阻抗法时,一般先要通过网络化简得到只保留直流换流母线节点的交流等值网络。回顾文献[9]中式(2)的推导过程不难发现,该式是在网络中有源节点注入电流恒定的前提下得到的,因此阻抗法给出的是把电网有源元件视为恒流源、由网络拓扑决定的MIIF。然而,小扰动后把换流站、发电机等有源节点视为恒流源是不准确的,把发电机视为恒流源误差尤其大,所以直接用大电网的节点导纳(阻抗)矩阵去计算MIIF,误差很大。
考虑到发电机励磁系统的调节作用,小扰动后把发电机视为恒压源才是合理的。如图1所示,当发电机节点m通过线路或变压器支路向下游节点n供电时,可以通过网络等值把这个支路简化为恒流源并联导纳的支路,等值注入电流Ieq=E/Z12,等值导纳yeq=1/Zeq=1/(Z1//Z12)。化简后,由发电机下游节点n注入网络的电流Ieq为常数。即:把发电机节点m消去后,从节点n注入网络的电流成为常数,按照式(2)计算MIIF的前提条件得以满足。而且,消去发电机节点m前、后,节点n的自导纳及n与其他节点间的互导纳并未发生改变。所以,适合计算MIIF的节点阻抗矩阵的形成方法是,先形成受端交流系统潮流计算所用全维节点导纳矩阵,再划去发电机节点所在的行和列,最后对此降维节点导纳矩阵求逆。以上改进方法省去了较为复杂的网络化简过程,可以直接应用于大电网,第5节将通过算例验证改进的有效性。

图1 网络化简示意图Fig.1 Schematic diagram for network simplification
5 几类计算方法比较与评估
5.1 测试平台
为评估前述4类MIIF典型计算方法的性能,本文建立图2所示两馈入4节点系统和图3所示三馈入36节点系统,后文简称“小系统”和“大系统”。小系统的参数见附录。大系统通过把经典新英格兰10机39节点系统[15]中的发电机31、32、35改造为直流逆变站、并在逆变站注入原系统中对应发电机的出力得到,其中DC1和DC2的电气距离较近,二者与DC3的电气距离较远。图3中送端系统与受端系统通过直流异步联网,故未画出。
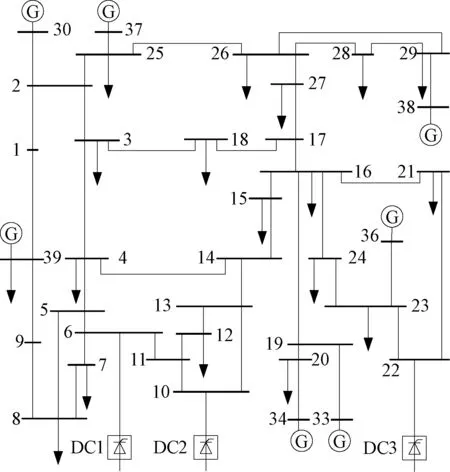
图3 36节点交直流系统接线图Fig.3 Diagram for 36-bus AC/DC power system
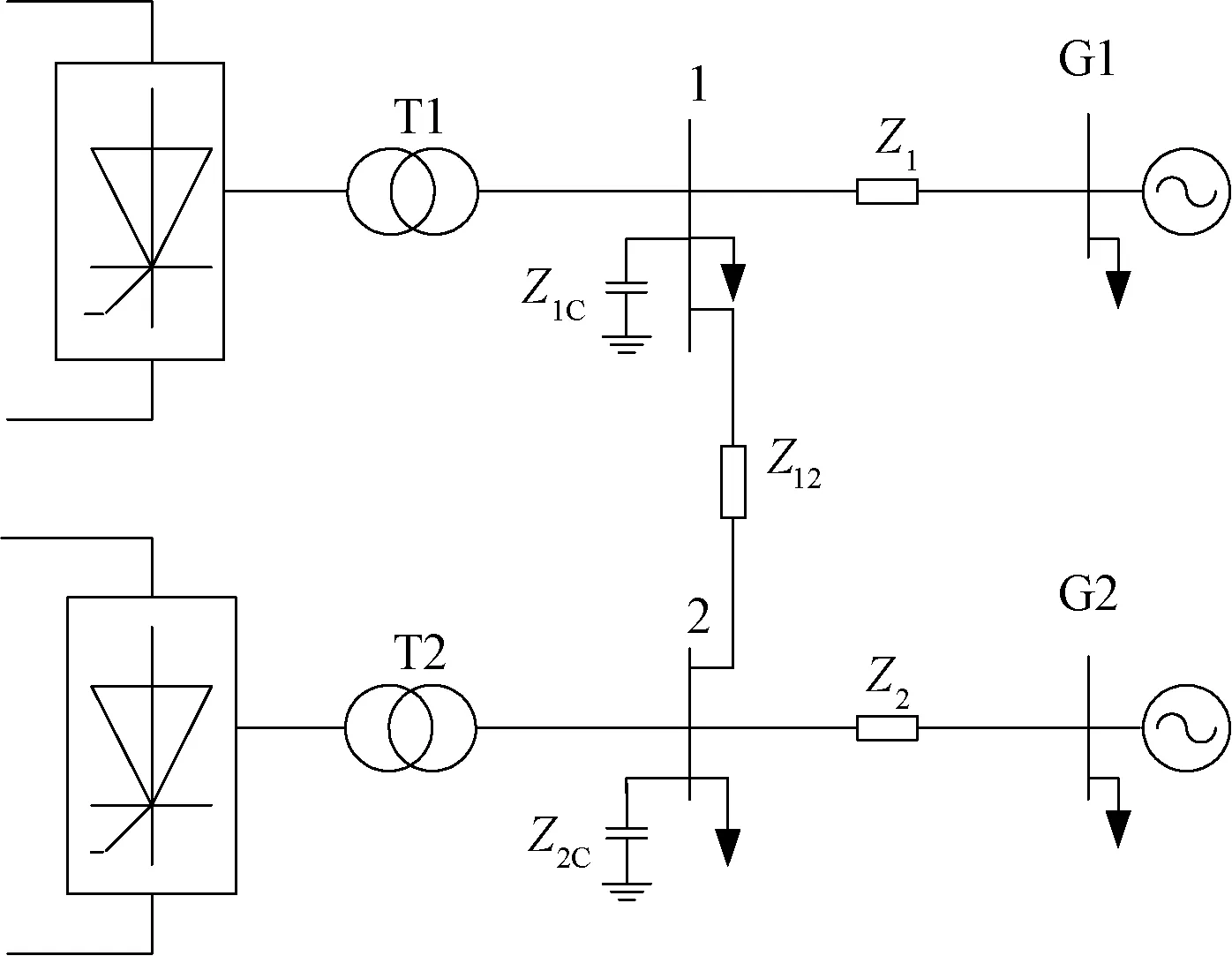
图2 两馈入系统接线图Fig.2 Diagram for double-infeed system
5.2 计算结果及分析
根据第2节的分析,拓扑参数、直流控制方式、发电机励磁和负荷特性都会影响MIIF,本节通过设置不同运行条件来考察这些因素对MIIF的影响。
(1)考虑2组拓扑参数。小系统中,参数一Z12=j0.08pu,参数二Z12=j0.6pu,显然第2组参数下两个换流站的电气距离较远。大系统中,参数一为36节点系统原始数据,参数二把线路6-11的长度增加一倍,使得DC1与DC2、DC3间的电气距离变大。
(2)考虑2种直流系统控制方式。三回直流均采取整流站定电流、逆变站定熄弧角(Iγ)控制和三回直流均采取整流站定功率、逆变站定熄弧角(Pγ)控制。
(3)励磁系统的作用通过加入或取消发电机励磁来体现。
(4)负荷模型考虑恒Z、恒I和恒P三种情形。
综上,共设置了2×2×2×3=24种仿真条件。小系统的计算结果见表1~表3,大系统的计算结果见表4~表6。

表1 小系统中时域仿真法计算结果(拓扑参数一)Tab.1 Results of time-domain simulation with 1st topology parameters in small system

表3 小系统中解析法计算结果Tab.3 Results of three analytical methods in small system

表4 大系统中时域仿真法计算结果(拓扑参数一)Tab.4 Results of time-domain simulation with 1st topology parameters in large system
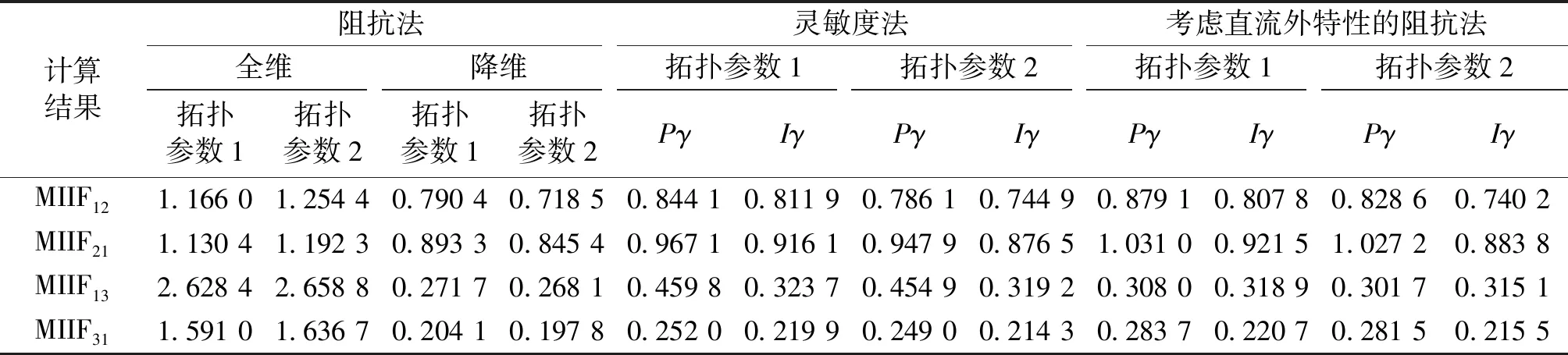
表6 大系统中解析法计算结果Tab.6 Results of three analytical methods in large system
5.2.1 时域仿真法
时域仿真法能反映上述所有因素对MIIF的影响。不失一般性,在表1、表2、表4、表5中列出时域仿真法在2种拓扑参数、7种代表性计算条件下的结果。其中,“Z/Pγ/有”的含义是负荷采取恒Z模型、直流采取Pγ控制方式,加入发电机励磁。其他依此类推。

表2 小系统中时域仿真法计算结果(拓扑参数二)Tab.2 Results of time-domain simulation with 2nd topology parameters in small system

表5 大系统中时域仿真法计算结果(拓扑参数二)Tab.5 Results of time-domain simulation with 2nd topology parameters in large system
(1)观察表1、表2、表4和表5每一行的结果,可见计算条件不同时,MIIF的数值也不同。MIIF数值较小时,波动更为显著。在小系统中,波动率最大达到27.44%,在大系统中达到132.56%,这表明MIIF是一个运行参数,敏感于多种运行因素。
(2)比较表1和表2,表4和表5对应位置的结果,可见其他条件一致时,拓扑参数2对应的MIIF均小于拓扑参数1,表明电气距离越远,MIIF越小。
(3)比较表1、表2、表4、表5中第2、3列,第4、5列,第6、7列的结果,可见“Z/Pγ/有”、“I/Pγ/有”、“P/Pγ/有”条件下的结果分别大于“Z/Iγ/有”、“I/Iγ/有”、“P/Iγ/有”条件下的结果,表明直流采取定功率控制会增大MIIF。
(4)比较表1、表2、表4、表5中第2、4、6列,第3、5、7列的结果可见,Z/Pγ/有”、“I/Pγ/有”、“P/Pγ/有”和“Z/Iγ/有”、“I/Iγ/有”、“P/Iγ/有”条件下的计算结果均为依次递增,表明恒阻抗负荷对应的MIIF最小,恒电流负荷居中,恒功率负荷最大。
(5)比较表1、表2、表4、表5中第2、8列的结果可见,“Z/Pγ/无”条件下的MIIF大于“Z/Pγ/有”,表明发电机励磁调节能降低MIIF的数值。
以上结果全面验证了第2节中的理论分析。
5.2.2 解析法
表3和表6给出3种解析法的计算结果。可知,大、小2个算例系统中,使用系统全维节点阻抗矩阵采用阻抗法求得的MIIF均大于1,误差很大;但使用第4节建议的降维节点阻抗矩阵时,阻抗法求得的MIIF均与表1、表2、表4,表5中第5列时域仿真法“I/Iγ/有”条件下的结果接近,略有偏差。这表明采用降维节点阻抗矩阵是正确的。如第4节所述,阻抗法给出系统中有源节点采取恒I模型时的MIIF,而“I/Iγ/有”仿真条件下负荷为恒I模型、直流采取Iγ控制方式时注入交流系统的电流大体恒定、加入励磁时发电机电压基本恒定。这就是说,阻抗法的假设条件与时域仿真条件“I/Iγ/有”基本契合、但不完全对等,因此二者结果接近。
还看到,直流采取Pγ和Iγ控制方式时,表3和表6中灵敏度法的计算结果分别与表1、表2、表4、表5中第6、7列时域仿真法“P/Pγ/有”和“P/Iγ/有”条件下的计算结果接近,但有偏差(小系统中较小,大系统中相对明显)。这是因为该方法从潮流雅克比矩阵中提取V/Q灵敏度信息计算MIIF。潮流计算中负荷一般采取恒功率模型、发电机作为PV或平衡节点电压值固定,与时域仿真条件“P/Pγ/有”和“P/Iγ/有”正好契合。灵敏度法在推导过程中进行了一些简化和假设,因此与时域仿真法的结果有些偏差。算例大系统中最大误差为20.4%(对应拓扑2下直流Pγ控制方式MIIF13的结果)。
最后,看到表3和表6中考虑直流外特性的阻抗法在直流采取Pγ和Iγ控制方式下的计算结果分别与表1、表2、表4、表5中第4、5列时域仿真法“I/Pγ/有”和“I/Iγ/有”条件下的计算结果接近,但有偏差(小系统中较小,大系统中较明显)。这是因为该方法在阻抗法的基础上增加考虑了直流控制方式对MIIF的影响,推导过程中的简化和假设造成一定误差。算例大系统中最大误差为28.8%(对应拓扑2下直流Pγ控制方式MIIF13的结果)。
5.2.3 小结
综上,MIIF是一个敏感于多种因素的运行参数。电网运行条件不同时,MIIF的数值可能发生很大的变化。3类解析法从各自的视角反映MIIF的大小,都仅在有限的场景下有效。
电网规划主要决策网架结构,规划人员在确定直流落点时常常需要知道直流系统间的相互作用强度。此时,推荐采用阻抗法,因为阻抗法排除了其他因素的干扰,给出网络拓扑决定的MIIF且计算相对方便。
电力系统运行方式多种多样,如需掌握实际运行工况下MIIF的准确数值,推荐采用时域仿真法,因为时域仿真法能全面反映各种运行因素对MIIF的影响。时域仿真法的缺点是物理意义不明确。根据前文的分析,已知增大换流站间的电气距离、增强电网电压稳定性都可降低MIIF,这些认识可以弥补时域仿真法的不足。
6 结论
本文以一个4节点和一个36节点交直流测试系统为平台,通过理论分析和仿真计算,对四类MIIF计算方法进行比较和评估,得到以下主要结论:
(1)拓扑、直流控制方式、电力系统电压控制措施、负荷特性都会对MIIF的大小产生影响,MIIF是一个敏感于拓扑和运行因素的电气指标。当两回直流电气距离较远时,上述因素对MIIF的影响十分显著,MIIF数值变化可高达100%以上。电网运行分析中,更推荐采用时域仿真法。
(2)阻抗法可以直接应用于大规模电力系统,但应使用不含发电机节点的降维节点阻抗矩阵来计算。阻抗法给出电网有源节点注入电流恒定时由电网结构决定的MIIF的数值。电网规划研究中,推荐采用阻抗法。阻抗法的计算结果与负荷采取恒电流模型、直流采取Iγ控制、加入发电机励磁时的时域仿真法的结果较为吻合。
(3)灵敏度法和考虑直流外特性的阻抗法综合考虑了拓扑结构和直流控制方式对MIIF的影响,虽然有效,仅在有限的场景下与时域仿真法的结果相符。具体说来,灵敏度法的计算结果与负荷采取恒功率模型、直流采取相同控制方式、加入发电机励磁时的时域仿真法的结果相符;考虑直流外特性的阻抗法与负荷采取恒电流模型、直流采取相同控制方式、加入发电机励磁时的时域仿真法的结果较为吻合。
附录
两馈入系统参数:Sn=1 000 MV·A,Vn=230 kV,Z1=j0.2pu,Z2=j0.15pu;负荷:母线1:400 MW;母线2:600 MW;母线G1:700 MW;母线G2:(900+j10) MV·A。发电机G1:V=1.04pu,θ=0°;发电机G2:V=1.04pu,P=300 MW,直流注入功率均为(980-j563.7) MV·A。无功补偿电容均为:-j1.773pu。
猜你喜欢
甘肃科技(2020年20期)2020-04-13
电子制作(2019年7期)2019-04-25
测控技术(2018年11期)2018-12-07
小天使·三年级语数英综合(2017年6期)2017-06-07
军事文摘(2016年16期)2016-09-13
系统工程与电子技术(2016年7期)2016-08-21
西北工业大学学报(2015年4期)2016-01-19
智能建筑电气技术(2015年5期)2015-12-10
电测与仪表(2015年2期)2015-04-09
电力工程技术(2014年1期)2014-03-20