多武器平台目标域协同射击控制模型研究
2021-06-11 00:53卢志刚武云鹏宋泉良翟晓燕
火力与指挥控制 2021年4期
卢志刚,刘 涛,武云鹏,宋泉良,翟晓燕
(1.北方自动控制技术研究所,太原 030006;2.陆军装备部装备项目管理中心,北京 100072)
0 引言
网络化协同火控系统是传统单平台火控系统向多平台的拓展延伸,其理论体系也是在传统火控系统理论体系的基础上拓展的,主要包括坐标系、武器协同数据传输模型、多平台协同决策模型、多平台协同控制模型(包括多平台协同数据时空配准模型、目标搜索捕获同步控制模型、目标跟踪瞄准同步控制模型、目标状态预测模型、射击诸元的分布式解算模型、跨平台武器同步调炮控制模型等)、目标域协同射击控制模型、作战效能评估模型等。
多武器平台网络化协同火力控制的目的是控制多武器平台对目标进行协同射击,提高对目标的命中概率、毁伤概率和射击效能。
单武器平台传统的射击控制主要有空域窗射击体制和射击门射击体制[1],多武器平台的协同射击控制需要在传统射击体制基础上,扩展到多武器平台对目标域的协同射击控制。射击控制模型包括目标域定义、射击效能指标定义、空间/时间复合三维射击控制模型、对点目标和对面目标的射击控制模型。
1 目标域定义
目标域是火力打击任务得以实现时被打击目标在某时刻所处的空间区域,记为Ω(k,t);其补集即为超差域,记为Ω(k,t);而目标域的边界记为∂Ω(k,t)。其中,k 表示空间因素,通常用直角坐标方程y=Ax 及参数a、b 等表示;t 表示时间因素。例如以机动目标预测点(命中点)为中心的有界区域、武器线的射击门或允许射击误差区域[2]。
根据不同的目标特征,目标域可以设定为带形、椭圆形、矩形等。
1.1 带形目标域
对线目标进行火力打击时,可以假定线目标位置为y=Ax 或x=Ay,其中,|A|≤1。以y=Ax 为例,以线目标中心附近某点为坐标原点O,沿线目标的方向设置带形目标域,如图1 所示。则仅在y 方向上设置射击门限[-b,b],x 方向不设射击门限。则射击门模型为:x1是目标坐标未来点横坐标值。

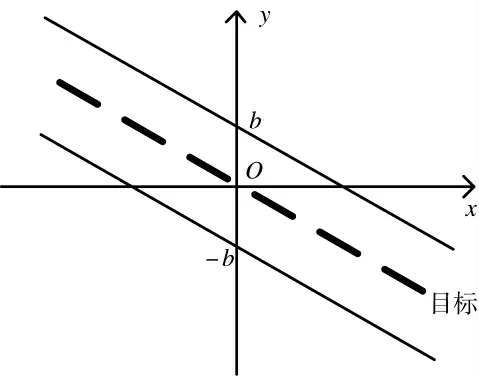
图1 带形目标域与射击门设置
1.2 椭圆形目标域
对地面集群面目标或空中集群面目标进行火力打击时,可以假定目标中心为坐标原点O,在目标周围设置椭圆或圆形目标域,如图2 所示。则在x 方向设置常数[-a,a],在y 方向上设置常数[-b,b],则射击门模型为:
图2 椭圆形目标域与射击门设置
1.3 矩形目标域
对地面集群面目标或空中集群面目标进行火力打击时,可以假定目标中心为坐标原点O,在目标周围设置矩形或正方形目标域,如图3 所示。则在x方向设置射击门限[-a,a],在y 方向上设置射击门限[-b,b],则射击门模型为:


图3 矩形目标域与射击门设置
2 射击效能定义
多武器平台对目标射击时,如果采用传统单平台的空域窗或射击门控制体制,对于目标的命中概率和毁伤概率完全取决于各武器平台的命中概率和毁伤概率[3]。在火力协同控制的模式下,采用协同射击控制机制可提高多平台组成的作战分队的总体命中概率、毁伤概率和射击效能。
所谓的射击效能是指在装定射击诸元的条件下,武器发射或者投掷足以毁伤目标的命中弹的能力。射击效能是武器系统作战效能的主要组成部分。其量化指标被称为射击效能指标。随着武器系统的功能与任务的不同,射击效能指标也会不同。对于陆战武器火控系统而言,分配给它的指标主要有两类:
1)射击的反应时间:从目标被发现的瞬时持续到弹药被发射的瞬时间的时间间隔。
2)毁伤能力,包括命中率和毁伤率。
如果记Ω(k,t)为目标区域,也称为靶区。那么此时,记E(k,t)为弹目偏差,ET(k,t)为脱靶量,那么此时ET(k,t)的定义是:0 所相应的弹头谓之脱靶弹,其脱靶量等于弹目偏差。
射击的命中概率Q(k,t)定义为:

命中概率仅与弹目偏差的分布函数与目标域有关,而与发射或者投掷的弹头数目无关。
对多武器平台协同火控系统总体分析与设计而言,最便于理解与使用的毁伤目标能力的指标可以这样规定:设毁伤某种类型目标需要S 发命中弹,在一个时间段内所有武器平台合计发射或投掷N 发弹头(战斗部)的射击过程中,至少命中S 发的概率定义为该射击过程对目标的毁伤概率。
3 多武器平台协同射击控制模型设计
为适应多武器平台在时空约束条件下的协同射击需求,设计了空间/时间复合射击门模型,包括空间射击门和时间射击门。针对点目标和面目标两种基本目标,分别设计了多武器平台对点目标的协同射击控制模型和对面目标的协同射击控制模型。
3.1 空间/时间复合射击门模型
空间射击门表示各武器平台火控系统在某一个时刻t1控制武器并能够使弹药进入目标域的方位向门限和高低向门限[4-5]。其模型是:

对于直瞄武器矩形射击门,其射击门中心是以瞄准线或跟踪线为基准的射击诸元(即目标未来点的中心),武器控制的方位向误差β(t1)、高低向误差ε(t1)需要进入空间射击门[-a,a]、[-b,b]才能具备最高命中率。
对于压制火炮的矩形射击门,其射击门中心是以火炮为基准的火炮空间姿态角(方位角与高低角),需要实时检测出的火炮空间姿态角(方位角与高低角)与火炮解算射击诸元之差进入空间射击门[-a,a]、[-b,b]才能具备最高命中概率。
时间射击门表示多武器平台需要在协同控制指挥中心规定的时间点t2附近某一个时间段[-Δt,Δt]内射击,才能实现对目标的联合毁伤效果最好,其时间控制模型是:

3.2 多武器平台对点目标协同射击控制模型设计
对点目标的射击主要用于坦克装甲车辆等直瞄射击的武器平台[6],也可以用于防空高炮对空中点目标进行直瞄射击。由于目标的机动运动以及本武器平台也可能处于运动中,需要根据协同指挥中心指定的目标,对射击空间进行射击门设置以提高命中概率[7]。同时要按照协同指挥中心指定的射击时间,进行时间射击门设置以集中火力提高命中后的毁伤概率。因此,设计了具有时空特性的多武器平台对点目标射击控制模型,主要包括空间射击门模型和时间射击门模型。射击控制逻辑图如图4 所示。

图4 多武器平台对点目标协同射击控制逻辑示意图
3.3 多武器平台对面目标协同射击控制模型设计
多武器平台分别采用命中概率分配得到的命中区域中心的空间射击门模型、统一的时间射击门模型。
对面目标的射击主要用于对地面线目标和集群目标进行间瞄打击的压制火炮等武器平台,也可以用于防空高炮对空中点目标或群目标进行直瞄射击[8-9]。群目标可以看作是一定目标域内均匀分布的多个目标点。对于空中点目标,由于其机动性强,在一定时间段内可能出现在一定空域范围内,可以将其认为是在一定空域范围内分布的面目标。由于目标分布在一定范围,所以多武器平台需要对这一范围进行打击覆盖范围、命中概率的计算,并通过协同指挥中心对射击诸元的解算,赋予各武器平台不同的射击诸元,并由各武器平台进行调炮诸元解算,分别控制各武器对准不同目标点,以提高对面目标的命中概率。同时要赋予各武器平台不同的射击时间,以集中火力提高命中后的毁伤概率。因此,设计了具有时空特性的多武器平台对面目标的射击控制模型,包括空间射击门模型和时间射击门模型。射击控制逻辑图如图5 所示。
图5 多武器平台对面目标协同射击控制逻辑示意图
对于压制火炮,由于多门间瞄火炮之间的站位、射角区别比较大,对同一射击距离的射角可以采用低射界(小于最大射程射角),也可以采用高射界(大于最大射程射角),所以弹丸飞行时间差别较大,协同指挥中心计算的射击时间点t2与当前时间t0的差较大,所以通常采用自动延时发射的方式,经过延时时间Δt0后自动发射,实现多平台协同打击效果最佳。其延时模型是:

4 多武器平台协同火力打击效能分析
网络化协同火力打击效能是网络化协同火力控制系统的效能,也是多武器平台战斗分队火力打击系统的综合效能,是组成战斗分队的各武器平台对目标毁伤效能的总和。由于防空作战与坦克突击作战具有相似的作战要素,所以以坦克分队多平台协同射击实现的火力打击效能分析为例,采用ADC分析法进行分析。
ADC 法是美国工业界武器系统效能咨询委员会的系统效能模型(称为WSEIAC 模型),比较符合高炮武器系统的效能分析[10]。ADC 法的模型表达式是:E=A·D·C,其中,E 为武器系统效能;A 为可用性,武器系统在任一需要投入作战或使用的随机时刻,处于可工作或可使用状态的程度,可用性的概率量度又称为可用度;D 为可信赖性,已知任务开始时可用性概率的条件下,在规定任务中的任一随机时刻,能够使用且能完成规定功能的能力量度;C 为能力,是在已知任务开始时可用性和执行任务期间可信赖性的条件下,系统完成任务能力的量度[11]。
在战斗分队多武器平台采用网络化协同射击控制技术后,不但使战斗分队武器系统的可用性A、可信赖性D 均有所提高,更主要的是提高了完成任务的能力量度C。本节重点分析战斗分队采用网络化协同射击控制技术前后能力C 的量度变化。
各作战单元(战车)作战效能,不只是传统条件下各战车独立进行火力打击作战的效能,还要考虑由于作战单元之间网络化协同火力控制产生的“网络赋能、信息聚能”的效能。
能力量度的获取是已知系统的状态后,求出系统各状态对应的品质因数值。品质因数可根据武器系统的具体情况选择。对于坦克,选择发现概率PD(在一定条件下搜索装置能够正确发现目标的概率)、服务概率Ps(目标进入坦克射程时,能够对该目标实施射击的概率)、毁歼概率Pk(目标被命中和毁伤的概率)作为品质因数。由此可以得出坦克战斗分队的火力打击效能为C=PD·Ps·PK。
对发现概率PD、服务概率Ps、毁歼概率Pk的分析,均忽略战斗分队队形的影响。
4.1 发现概率的分析
发现概率依其工作模式的不同,与搜索装置自身的性能有关,与环境因数、目标距离及红外辐射特性、目标外廓大小等目标属性有关,还与对方施放干扰情况、虚警概率以及己方情报指挥系统和预警系统的支持程度等因素有关。对于单一坦克在确定的战场条件下,其发现概率PD是确定的。
设坦克战斗分队为排级战斗队,有3 辆完好的坦克,则由于在网络化协同火力控制技术条件下,一点发现全网皆知,所以其每一辆坦克的发现概率变为PD'=1-(1-PD)n。
4.2 服务概率的分析
服务概率与坦克火控系统的射击反应时间、跟踪误差、平稳性、跟踪速度和加速度、射击间隔等因素有关,反映了炮手全过程跟踪目标的质量。对于单台坦克,其服务概率Ps是确定的。这里将服务概率分为火控服务概率与火力服务概率两部分。由火力固有特性决定的火力服务概率设为Ps1,由火控系统所决定的射击反应时间、跟踪误差、平稳性、跟踪速度和加速度等因素决定的火控服务概率设为Ps2。系统服务概率Ps=Ps1·Ps2[12]。
设坦克战斗分队为排级战斗队,有3 辆完好的坦克,则由于采用网络化协同射击控制技术,信息融合、航迹融合、辅助决策、火力分配、协同跟踪等功能使火控系统反应时间、跟踪误差、平稳性等性能对目标的服务概率得到协同补充,而在火力固有特性决定的服务概率不变的情况下,其每一个坦克战斗分队的发现概率变为Ps'=Ps1·(1-(1-Ps2)n)。
4.3 毁歼概率
毁歼概率一般可以表示为命中概率与已知条件下该发弹丸击毁目标的平均概率的乘积,即PK=Q(k,t)·P击毁。鉴于坦克炮弹的威力较大,P击毁接近1,所以效能分析中通常假设“命中即摧毁”[13-14]。
坦克战斗分队每一辆坦克的毁歼概率Pk与是否实现网络化无关,保持不变。
4.4 网络化坦克战斗分队火力打击效能计算分析
综上所述,由3 辆坦克组成的坦克战斗分队的火力打击效能计算公式同式(8)。
不失一般性,设单辆坦克PD=40 %~90 %,Ps1=80%,Ps2=40%~90%,Pk=50%。n 为3。可计算得到下页表1 结果。
可见,采用网络化协同射击控制方式后,排级坦克战斗分队火力打击效能大幅提高。特别是火控系统的发现概率与服务概率较低的坦克装甲车辆武器系统(比如手动搜索系统比自动周视搜索系统的发现概率低,简易火控系统服务概率比稳像式火控系统服务概率低),实现搜索、跟踪与火力打击控制组网后,最多可提高到3.842 倍,最少可提高到1.232 倍。对于发现概率与火控服务概率在60%左右的第三代坦克装甲车辆,其排级坦克战斗分队火力打击效能普遍将提高到2.4 倍。

表1 网络化坦克战斗分队火力打击效能计算分析表
另外,由于计算分析采用的战斗分队是3 辆坦克组成的排级战斗队,组网的武器平台数量是3台,如进一步扩展到连级战斗分队10 辆坦克,其作战效能还可略有提高。
5 结论
目标域协同射击控制是针对多武器平台对目标协同射击的需求设计的射击控制方案,通过对坦克战斗分队多武器平台协同射击效能的计算分析,证明了目标域协同射击控制模型用于连、排级小型战斗分队时,对于提高火力打击效能具有显著的作用。
猜你喜欢
文萃报·周二版(2022年24期)2022-06-16
民族文汇(2022年13期)2022-05-07
北京航空航天大学学报(2021年9期)2021-11-02
水上消防(2021年3期)2021-08-21
政工学刊(2021年8期)2021-07-31
房地产导刊(2020年7期)2020-08-24
读者·校园版(2020年12期)2020-06-19
汽车杂志(2018年6期)2018-06-25
现代企业(2015年6期)2015-02-28
青年文摘·上半月(1984年10期)1984-11-01