化工过程控制PID控制器分析与仿真
2021-06-15 05:50迟畅中国石油四川石化公司四川彭州611930
化工管理 2021年11期
迟畅(中国石油四川石化公司,四川 彭州 611930)
0 引言
目前化工行业发展迅猛,自动控制在化工装置中的地位越发关键。选择一种合适的自动控制算法可以增强装置操作的平稳性减轻操作人员工作负担,对化工装置安全与长周期运行起到至关重要的作用。目前化工装置常用的控制算法为PID算法。PID算法发展历程已近百年,广泛的运用于各种工业控制中。该算法简单实用,鲁棒性较强且参数少整定简单。目前PID算法已经较为成熟,是随着化工装置快速发展,装置处理能力随之增加,各设备、管线也相应增大。从控制角度来讲各被控对象的惯性与滞后时间均大幅增加,现场干扰因素也较为复杂。以上变化使控制难度增加,对控制算法提出了更进一步的要求。
以往的研究被控对象时间常数与滞后时间均较小,且没有考虑现场扰动情况。文章以分馏装置某一温度控制回路为例,通过实验测得被控对象传递函数,分析基本PID以及常见几种变形PID算法并进行仿真。
1 被控对象建模
研究对象选择本单位某一温度控制回路。该工艺流程为塔内介质抽出,经过泵加压后进入换热器降温后返回塔内。该过程中使用热电偶测量介质返塔温度,控 制器输出同时作用于两个调节阀,分别控制介质通过换热器流量与通过旁路流量,冷热两路介质混合实现温度控制。
在本研究中将该过程近似为一个带有滞后的一阶惯性环节。对该控制回路进行阶跃测试,并观察响应曲线近似得到被控对象传递函数,如式(1)所示:

首先,测试前应保证装置操作平稳防止因其他变量波动对测试造成影响。其次,为控制器输入一个阶跃信号,输入时应注意该阶跃信号的响应要大于扰动引起的响应。最后记录输出的变化量、滞后时间以及输出值为稳态值的0.632时所用的时间。经计算得出被控对象的增益K、时间常数T以及滞后时间τ。应进行多次测试以减小现场干扰等因素所引发的实验误差。
经测试得该被控对象的传递函数如式(2)所示:
2 PID算法分析与仿真
通过测试得到被控对象传递函数后,对控制回路进行建模,该控制回路如图1所示。

图1 控制系统结构图图1 中G(s)为被控对象,D(s)干扰信号。
2.1 基本PID算法
基本PID算法以输出与输入的偏差值作为控制器 入信号,分别对该信号进行比例放大、积分、微分运算后输出,输出信号作为控制信号作用于执行器,对被控对象起到控制作用。基本PID时域表达式如式(3)所示:
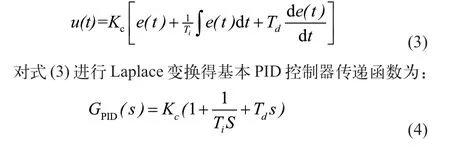
在化工生产中常用DCS进行控制,在操作过程中通过在DCS操作系统中输入数值达到改变给定值的目的,该操作可视为对控制系统施加一个阶跃信号。由式(4)可知为系统施加阶跃信号后PID控制器的微分项会产生一个很大的响应,导致PID控制器出现一个巨大的输出,此现象被称为微分冲击。微分冲击虽然时间短暂但是回对控制系统产生强烈的冲击,会使执行器短时间内快速来回动作,降低执行器使用寿命,也可能造成系统波动影响装置平稳操作严重时甚至会引发安全事故[1]。
由于微分冲击现象会对装置长周期运行与安全运行产生隐患,目前化工装置中已经很少使用基本PID算法进行控制。通常使用几种变形PID进行控制。
2.2 单回路控制
单回路控制系统中只有一个控制器,控制器输出的控制信号直接作用于被控对象。正常生产时控制系统设定值一般为恒定数值只有在操作变动时会改变设定值。故单回路控制系统通常情况下可视为定值控制系统。
为减少给定值改变时产生的积分冲击,控制系统通常采用变形PID算法进行控制,常见的变形有微分先行PID控制(PID)与比例微分先行PID控制(I-PD)两种。
PI-D控制器是将基本PID控制器的微分控制前移至系统输出处,即对系统输出先进行微分将结果与正常运算的比例积分控制输出做差,将所得结果作为控制信号作用于被控对象。PI-D控制结构如图2所示。

图2 PI-D控制结构图
该控制器在输入信号产生突变时由于微分作用移至输出故控制器不会产生微分冲击。该控制器减少了对控制系统产生的冲击,增加了装置的稳定性与安全性同时增加了执行器的使用寿命。对装置安全与长周期运行起到了积极作用。
I-PD控制器与PI-D控制器结构相似,该控制器将比例与微分控制同时前移。对系统输出进行比例微分运算其结果与正常运算的积分控制器输出做差,所得结果作为控制信号作用于被控对象。I-PD控制结构图如图3所示。
该控制器在PI-D控制器的基础上将比例作用移动至输出处。移动后将设定值突变时由比例作用对偏差信号放大产生的冲击一并消除,进一步提高了控制系统的稳定性[2]。
由于PI-D控制器与I-PD控制器能够有效的消除给定值变化所带来的冲击,同时控制器与其他先进控制相比结构简单、稳定性强、价格低廉故在各化工装置中得到了广泛运用。
使用本文第2节所测得的被控对象模型对几种PID控制器进行仿真,对比各控制器的控制效果。被控对象传递函数如式2所示。使用Matlab/Simulink搭建控制系统模型。模型结构如图1~图3所示。考虑化工生产中现场中有干扰存在,故在仿真模型中施加干扰信号d(t)。仿真中假定干扰信号由两个幅值不同的高频正弦波信号叠加形成,并在初始时刻开始对系统产生影响。仿真模拟正常生产时改变设定值的情况,即系统有某一稳定的初始状态,在某一时刻对系统施加一个阶跃信号并观察系统的响应[3]。
选取Kc=5,Ti=1000,Td=5进行仿真,在不考虑扰动信号的情况下对比几种PID控制器产生的控制信号u(t)。仿真结果如图4所示。
选取Kc=8,Ti=1000,Td=10进行仿真,在考虑扰动信号的情况下,对比采用PI-D控制器与I-PD控制器时控制系统的阶跃响应。仿真结果如图5所示[4]。由仿真结果可知,在PID参数相同时采用PI-D控制器进行控制时虽然系统的调节时间较短,但是会出现超调。采用I-PD控制器进行控制时虽然系统不会产生超调,但是调节时间增长。
在实际生产过程中某些数据应尽可能保持平稳,如反应温度等重要参数如果发生较大程度的超调与波动则有可能会造成整个装置波动,严重时甚至会引发停工或造成安全事故。故在控制算法选取时可以考虑牺牲系统调节时间提高系统稳定性。对一些要求快速调节的过程如可以接受一定超调与震荡则可以选择调节较快的控制算法。
单回路控制系统应根据工艺要求选择合适的PID算法,并确定适合的控制参数,如果有条件也可选择先进控制算法进行控制。

图3 I-PD控制结构图

图4 控制变量的阶跃响应

图5 单回路控制系统阶跃响应
2.3 串级回路控制
串级回路由两个控制器构成,副控制器的给定即为主控制器的输出。主控制器给定一般在DCS中设置,可视为定制控制系统。由于现场存在扰动故主控制器的输出信号经常波动,所以副回路可视为随动控制系统[5]。
串级控制回路主回路为定值控制系统,PID算法选取在上节已经分析此处不再赘述,本节主要分析串级控制系统的副控制器回路。
选取Kc=5,Ti=1000,Td=10进行仿真,在考虑扰动信号的情况下,对控制系统输入方波信号,观察比较PI-D控制器与I-PD控制器的响应。控制器方波响应如图6所示。
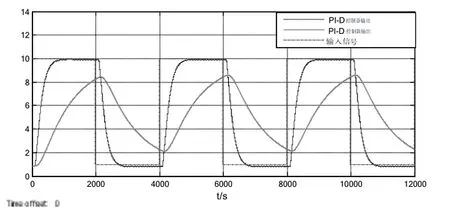
图6 串级控制系统副回路方波响应
分析仿真结果可知PI-D控制器跟踪性能较好,且采用合适的PID参数可以消除超调。I-PD控制器调节时间较长,对频繁变化的给定无法快速跟踪。故串级回路副控一般选用I-PD控制算法[6]。
3 结语
通过对不同种类PID算法进行分析并进行仿真,对比采用不同控制算法时系统的输出,得出适用于现代化工装置的PID控制规律。基本PID控制器由于微分冲击较大已经很少使用。单回路控制系统可根据工艺需求选择I-PD或PI-D控制。串级回路主控制器与单回路相似,副控制器一般选用随动性能较好的PI-D控制器。控制方式的选择应根据装置实际情况与工艺要求进行选择,同时应根据情况选择适当的PID参数。
虽然大多数化工装置的控制仍在由经典PID算法实现,但是经典PID算法依然有其局限性。若有条件可以选用性能更好的先进过程控制(APC)进行控制。随着控制算法的发展与研究APC控制将会得到更加普遍的运用。同时经典PID控制也将得到一定的改进。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
内蒙古电力技术(2022年1期)2022-03-18
化工自动化及仪表(2021年6期)2021-11-26
环球时报(2020-08-11)2020-08-11
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
北京航空航天大学学报(2017年10期)2017-04-20
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27