
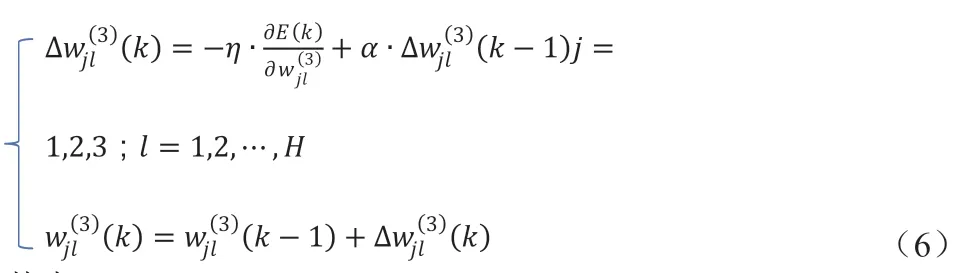
基于神经网络系统辨识PID控制的设计与仿真
2021-06-16 06:31李建新
电子技术与软件工程 2021年8期
李建新
(广州工商学院工学院 广东省广州市 528138)
1 概述
过程控制常常遇到大惯性与纯滞后、多变量与耦合且对象模型时变不确定系统,控制系统结构和参数需要依靠经验和现场调试来确定。PID 控制使用可靠、参数整定方便,成为过程控制常用的控制规律。PID 控制三个控制参数其整定是控制系统设计的核心,往往参数整定完成后,整定好参数并不具有自适应能力,因生产环境发生改变,参数又需要重新整定。利用神经网络多输入多输出以适应多变量与耦合、神经网络模型辨识以适应对象模型时变不确定性监测,使得控制具有良好在线自学习和自适应能力,可以很好发挥PID 比例、积分、微分控制优势。
2 系统设计
2.1 总体设计
设被控对象为:

式(1)中被控对象的非线性特性gs(•)未知,需要神经网络辨识器在线辨识以确定被控系统的模型。PID 控制要取得较好的控制效果,关键在于调整好比例、积分和微分三种控制作用的关系。在常规PID 控制器中,这种关系只能是简单的线性组合,因此难以适应复杂系统或复杂环境下的控制性能要求。

图1:基于神经网络系统辨识PID 控制系统结构
从变化无穷的非线性组合中可以找到三种控制作用既相互配合又相互制约的最佳关系,而神经网络所具有的任意非线性表达能力,可用来实现具有最佳组合的PID 控制。
如图1 所示,系统由被控对象、NNC 和NNI 组成。NNC 为神经网络PID 控制器,NNI 为控制对象gs(•)神经网络辨识器。e(k)=r(k)-y(k)为PID 控制偏差,为NNC 反向传播权值调整偏差,为NNI 反向传播权值调整偏差。其中y(k)为系统输出时间响应,为辨识器输出时间响应。
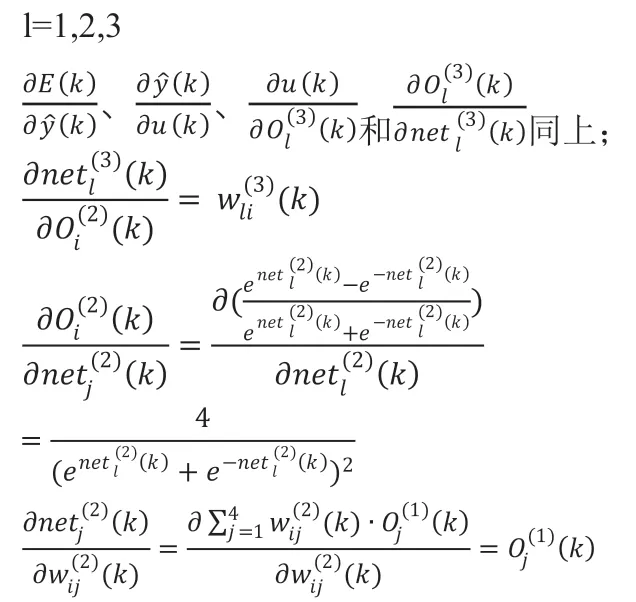
2.2 神经网络NNC PID控制器学习算法
如图2 所示,NNC 神经网络权值和输出为式(2)。

2.2.1 NNC 正向传播算法
设NNC 输入层的输入为:

NNC 输入层的输出为:

NNC 隐含层的输入、输出和激活函数为:

NNC 输出层的输入、输出和激活函数为:
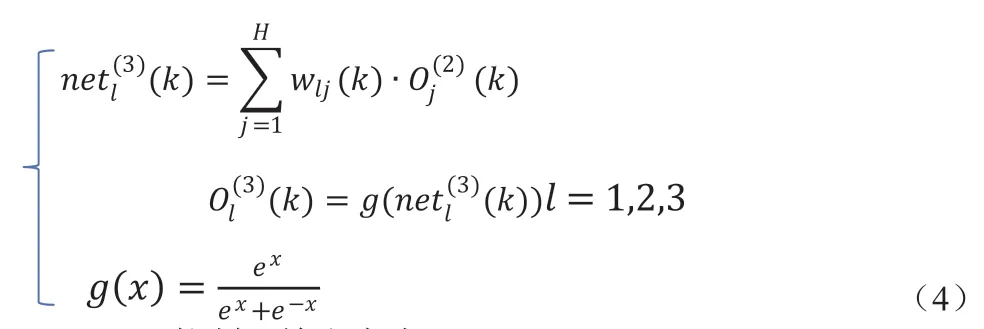
NNC PID 控制器输出为式(5):
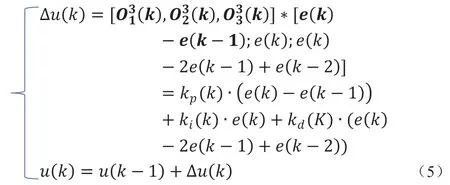
2.2.2 NNC 反向传播权值调整算法

图2:三层BP 网的NNC 拓扑结构
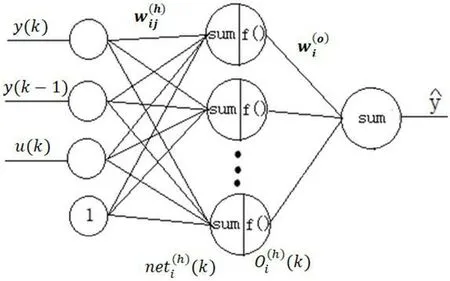
图3:三层BP 网的NNI 拓扑结构
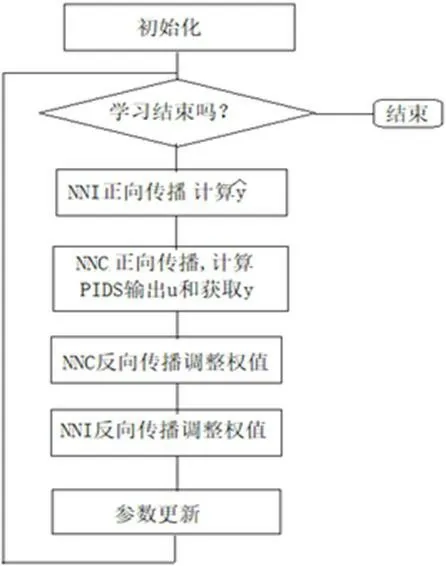
图4:基于神经网络系统辨识PID 控制系统算法流程
其中:


图5:NNC 和NNI 曲线

隐含层含有动量项的权值调整量表达式:

其中:

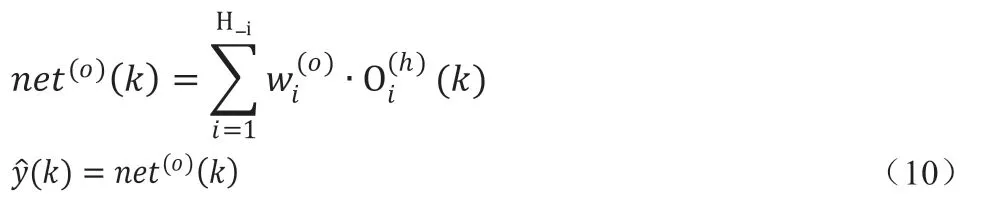
2.3 神经网络辨识器NNI学习算法
如图3 所示,设NNI 中的神经网络用三层BP 网络实现,输入层至隐层的权值矩阵为WI1,隐层至输出层的权值矩阵为WI2,网络的设计如下:

2.3.1 NNI 正向传播算法
(1)输入层设n+m 个神经元,分别接收被控对象的n 个输出序列和m 个输入序列。这里取n=2、m=1 因此输入向量:

(2)NNI 网络隐层设计。
一般设为单隐层,神经元个数h 需由实验确定。隐层第i 个神经元的输入为
NNC 隐含层的输入、输出和激活函数为:

NNI 输出层的输入、输出:
2.3.2 NNI 反向传播权值调整算法
输出层含有动量项的权值调整量表达式:

其中:


图6:PID 控制器参数曲线
i=1,2,…,H_i 隐含层含有动量项的权值调整量表达式:

其中:

3 实验分析
3.1 算法实现
如图4 所示,主要为NNC 和NNI 的算法和PID 控制实现
3.2 实验数据分析
实验结果如图5 所示,实验数据此处省略。设采样周期Ts=0.001 秒,选择系统响应时间分别为6、0.6、0.1 秒,由于响应时间为6、0.6 秒数据量很大,故不一一赘述。以下主要以响应时间为0.1 秒,对阶跃信号r=37℃为例做如下分析。
3.2.1 系统时间响应
由图5(a)可知响应曲线具有较好的平稳性,快速性和稳态精度。
(2)调节时间ts=39ms(取误差带±2%)
(3)稳态误差

可知响应曲线具有较好的平稳性,快速性和稳态精度。
3.2.2 NNI辨识器
根据图5(b)和如下所示的e1 前18 个采样数据可知,
3.2.3 PID参数整定
如图6所示,在0.05秒或者50个采样周期后过渡过程基本结束,PID 参数kp、ki 和Kd 保持稳定,控制信号u 趋于平稳,执行机构动作保持平稳,调节过程稳定。
4 结束语
结合神经网络超强的自学习和非线性逼近能力,设计了基于BP 神经网络的PID 控制算法和对象辨识算法,很好的解决了过程控制中常常遇到的模型识别和控制困难等问题。同时仿真中没有采用MATLEB 相关的神经网络函数去实现算法,而使用MATLEB 基本语句编程,即这样的方法实现了在线学习和控制,避免了离线使用数据集学习后再进行控制,又可以容易移植到所开发的目标机上。仿真实验验证了这种控制方法的有效性,并通过对比可知其性能明显优于常规的PID 算法,设计达到了预期目的。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
环球时报(2020-08-11)2020-08-11
人民珠江(2019年4期)2019-04-20
机电工程技术(2018年10期)2018-12-06
自动化学报(2017年7期)2017-04-18
计算机工程(2014年9期)2014-06-06
机械工程与自动化(2014年3期)2014-05-07
上海电机学院学报(2013年3期)2013-03-11
