
基于视觉的公共区域管理与机器人服务系统
2021-06-16 09:35樊小凯薛锦茹冯婧媛叶宏庆
电子技术与软件工程 2021年7期
樊小凯 薛锦茹 冯婧媛 叶宏庆
(华北理工大学人工智能学院 河北省唐山市 063210)
基于视觉的公共区域管理与机器人服务系统是一款集监测、提醒、引导、送物等功能于一体的智能系统,它结合已经基本成熟的巡逻机器人技术,通过摄像头识别场景中的对象和周围情况,做出合理分析并为机器人提供相应指令。
1 设计思路
基于视觉的公共区域管理与机器人服务系统主要由三部分组成,分别是视觉识别定位系统、地面机器人和上位机。整体设计如图1 所示。
视觉识别定位系统通过在应用场景架设工业相机,通过工业相机获取图像,识别当前场中人员,找出当前场地中需要提醒的目标,如未带口罩人员和做出特殊手势需要服务的人员。通过固定的工业相机、激光雷达、码盘、陀螺仪等多种传感器的数据估计机器人当前位置,通过路径规划算法规划最优路线,为机器人发送具体的移动指令,控制机器人接近目标,向被提醒目标传递信息。
地面巡逻机器人搭配麦克纳姆轮结构,能够实现灵活的全向移动,并且保证在狭窄通道和凹凸地面的通过性[1]。搭载激光雷达,提前导入地图智能规划路线,并依据现场反馈微调路线,从而避免与建筑或其他障碍物发生碰撞。通讯方式采用Wi-Fi 的方式收发信息,适用范围广阔。配备遥控控制模式和小型载物台,方便使用者控制移动和小物件的运输。
上位机主要作为机器人和工业相机的上级单位控制,管理人员能够从上位机获得机器人或工业相机的状态、视角以及控制权。如果机器人判断自身出现了难以处理的问题则可以向上位机发送人工接管控制权的请求,由管理人员来处理。同时,机器人等下级设备的日常运行情况,程序运行状况等都会实时的发送到上位机,由上位机记录下来。
2 结构设计
基于视觉的公共区域管理与机器人服务系统整体结构设计如图2 所示。
2.1 底盘结构
底盘整体采用铝制结构,在保证强度的前提下避免重量过高,应用麦克纳姆轮和悬挂系统,每颗麦轮由一颗3508 减速电机实时驱动,实现全向移动保证移动灵活,悬挂系统采用桥式独立悬挂,可以在地砖路面、水泥路面等平稳行驶,悬挂零件采用cnc 工艺,保证了机器人的整体性、稳定性。底盘结构如图3 所示。
2.2 口罩递送结构

图1:整体设计

图2:整体结构设计

图3:底盘机构

图4:口罩递送结构

图5:识别目标

图6:激光雷达建图
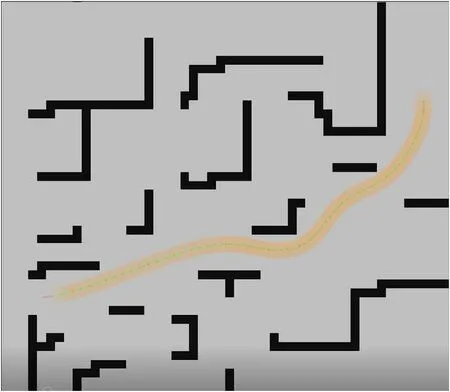
图7:路径规划
口罩递送结构是由一枚2006 减速电机为动力,通过同步带传动,完成挥臂的动作。机械臂到达口罩盒处,按压口罩盒里的口罩,同时压力传感器检测按压的力度,到达一定的压力后,口罩会附着在机械臂上的无菌毛毡上,完成抓取。口罩递送结构设计如图4 所示。
3 程序设计
3.1 视觉识别算法
场景中的工业相机实时获取场景中的画面,通过神经网络以及视觉算法选择符合要求的目标(如未带口罩,招手示意等),结合摄像头的位置,通过坐标转换计算出目标所在的位置,发送信息给机器人路径规划和导航的程序部分。识别人脸是否佩戴口罩、不同手势的实际效果如图5 所示[2]。
3.2 机器人定位算法
机器人获得激光雷达和下位机提供的实时机器人运行速度等参数后通过AMCL(adaptive Monte Carlo Localization)自适应蒙特卡洛定位,扩展卡尔曼滤波定位,坐标转换等算法结合预先载入的地图估计出机器人当前的位置,为机器人的巡逻提供实时位置和路径规划提供准确的起点[3]。激光雷达建图效果如图6 所示。
3.3 机器人导航算法
接收视觉定位系统和机器人定位系统计算得到的坐标信息,如有多个目标则先通过算法为目标分配优先级,再结合超声波雷达和激光雷达等传感器通过规划算法例如A*、D*、RRT、RPM 等算法获得最优的路径,计算速度控制信息并发送给运动控制单元[4]。路径规划效果展示图如图7 所示。
4 结束语
基于视觉的公共区域管理与机器人服务系统融合机械设计制造及其自动化、电子科学、图像识别、SLAM、通信等技术,自动化和智能化程度较高,能够实现监测、提醒、引导、送物等功能,有效的减轻了管理人员在监管工作中的压力,同时降低了被感染的风险,具有很高的应用价值和前景。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
海峡姐妹(2020年4期)2020-05-30
作文大王·笑话大王(2019年3期)2019-04-22
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09
