
基于小干扰动态模型的LCC-HVDC系统控制器参数优化方法
2021-06-16 02:53叶运铭汪娟娟陈威周保荣杨健
南方电网技术 2021年4期
叶运铭,汪娟娟,陈威,周保荣,杨健
(1. 华南理工大学电力学院,广州 510641;2. 直流输电技术国家重点实验室(南方电网科学研究院),广州 510663)
0 引言
目前,电网换相换流器技术在高压直流输电工程领域当中已经得到了广泛的应用[1 - 6]。随着科学技术的不断发展,尽管电压源换流器技术的出现为高压直流输电注入了新的活力,但传统电网换相换流器技术在国内外高压直流输电工程领域当中仍然占据非常重要的地位。
作为决定直流输电工程性能质量的重要因素,直流输电的控制保护系统是实现直流输电工程正常运行所不可或缺的组成部分[7]。对于LCC-HVDC输电系统而言,其控制系统包括整流站控制系统、逆变站控制系统和锁相环(phase-locked loop, PLL)三部分,这些控制系统共同作用,维持HVDC输电系统的正常运行。鉴于比例-积分控制器具有结构简单、鲁棒性良好及调节速度快等特点,国内外直流输电工程的控制系统通常采用PI控制器作为基本控制器[8]。合理的控制器参数不仅能够保证系统的稳定运行,还能提高系统的动态响应性能。实际高压直流输电工程中控制器的参数整定主要依赖定性分析,缺少理论依据且无法进行定量整定。目前在LCC-HVDC输电系统的实际工程当中,定电流、定电压和定关断角比例-积分控制器参数常采用离线电磁暂态仿真和控制保护系统动态性能试验进行整定,这种方法本质上是一种试凑法,而试凑法往往具有一定的盲目性和不确定性,在实验室调试和现场试验中往往需要丰富的经验。因此,有必要对系统的控制器参数整定及优化方法进行研究。
目前,已有相关学者对高压直流输电系统的控制器参数优化进行了相关研究。文献[9 - 12]均推导了定电流控制器的传递函数,并采用不同方法对定电流控制器的PI参数进行了优化。文献[9]根据幅值裕度与相位裕度的限制筛选出PI参数的可行域,并利用PSCAD的Multiple Run功能以一定的步长进行参数寻优。文献[10]和文献[11]分别提出了一种自适应粒子群优化算法以及一种改进的蚁群算法,采用ITAE指标对定电流控制器的参数进行了优化。文献[12]提出了一种PI控制器参数的可视化整定方法,该方法可依据实际系统所要求的频域性能和时域性能指标自由地对控制参数进行优化。然而,上述文献在换流器建模时采用一阶惯性环节替代,建模精度较差,同时仅考虑了定电流控制器参数的整定,锁相环等控制器参数的影响及直流电压的动态响应性能并未得到关注。文献[13]提出了一种混合遗传算法用以进行定电流控制器的参数优化,但该方法在获取控制器参数可行域时需进行逐点多次仿真计算,工作量较大。文献[14]在MATLAB/Simulink中搭建了VSC-HVDC的仿真模型,并将粒子群算法程序与该仿真模型结合进行仿真计算,通过多次迭代得出优化的控制器参数,但在每次迭代中均需运行一次仿真模型,优化效率有待提高。文献[15]建立了VSC-HVDC系统的小干扰动态模型,并以振荡模式和衰减模式的罚函数作为目标函数,提出了基于粒子群优化算法的VSC-HVDC系统的控制参数优化策略,同时对各控制器的参数进行了优化。文献[16]建立了含STATOM的LCC-HVDC系统的小干扰动态模型,并采用二次型指标和蒙特卡洛方法对控制器参数进行了优化,优化后系统能够在低短路比下稳定运行。上述基于小干扰动态模型的控制器参数优化方法更注重于提高系统的稳定性,而对改善HVDC系统动态响应性能方面的研究较少。
鉴于已有文献存在建模精度较低、多次仿真耗时较长以及未关注直流电压动态响应性能等情况,本文提出了一种基于小干扰动态模型与传递函数模型的控制器参数优化方法,采用粒子群优化(particle swarm optimization, PSO)算法对全系统的控制器参数进行优化,同时对LCC-HVDC输电系统的直流电流及直流电压的动态响应性能进行改善。首先,建立了计及锁相环输出相位与交流母线电压实际相位差异的双端LCC-HVDC输电系统的小干扰动态模型;然后,基于根轨迹法,获取了致使系统小干扰失稳的控制器参数临界值作为后续算法中的粒子位置参数上限;最后将小干扰动态模型转换为传递函数模型,应用PSO算法,以时间乘绝对误差积分(integral of time multipled by the absolute value of error, ITAE)指标为目标函数,对所有控制器参数同时进行了优化。
1 LCC-HVDC输电系统
本文所研究的LCC-HVDC输电系统整流侧采用定电流控制方式,逆变侧采用定电压控制方式,其单线原理图如图1所示。在图1中,各符号变量的下标“r”代表整流侧相关变量,下标“i”代表逆变侧相关变量,其中:us和Vs为交流系统的电网电压及其幅值;Rs和Ls分别代表交流系统的等值电阻和等值电感;Vpcc为公共连接点电压;is为交流系统的电网电流;ic为流经换流变压器网侧的电流;k为换流变压器的变比;Lec为换流变压器对直流侧的等效影响电感[17];Rdc1、Rdc2、Ldc1、Ldc2和Cdc代表T型直流输电线路的等值电阻、电感和电容;Idc代表流经直流输电线路的直流电流;UCdc代表直流输电线路中点对地电压。R1—R3、L1、L2及C1—C4为交流滤波器组相关支路的电气元件,其参数与CIGRE标准测试模型中交流滤波器组参数[18]一致。

图1 LCC-HVDC输电系统单线原理图
1.1 状态空间模型
关于整流侧交流部分、直流线路及逆变侧交流部分的状态空间模型可参考文献[19 - 21],本文仅对换流站、定电流控制器、定电压控制器及锁相环建模过程进行说明。其中,换流站及锁相环模型均以整流侧为例,逆变侧模型类似,文中不再赘述。此外,文献[19 - 21]在建模过程中忽略了锁相环输出相位与交流母线电压实际相位在动态过程中的差异,本文将在建模过程中予以考虑。
1.1.1 换流站模型
考虑到在动态过程中锁相环输出相位与交流母线电压实际相位间存在差异[22],令θactr为整流侧交流母线相电压的实际初相位,则有:
(1)
式中:vpccrd/vpccrq分别为Vpccr的d/q轴分量;xPLL1为整流侧锁相环输出相角的初相位。因此有:
(2)
故LCC整流站交、直流侧电流在dq坐标系下的关系可表示为:
(3)
式中:icrd/icrq分别为icr的d/q轴分量;μr为整流站换相重叠角;φr为整流站功率因数角。
1.1.2 定电流控制器模型
定电流控制器的原理如图2所示,其状态空间模型如式(4)所示。图2及式(4)中:Idcref为直流电流指令值;Idcrm为直流电流的测量值;G1为一阶惯性环节的比例系数;TIdc为电流测量时间常数;x1为状态变量;αord为延迟触发角指令值;αact为实际延迟触发角;KpIdc和KiIdc分别为定电流控制器的比例系数和积分系数。
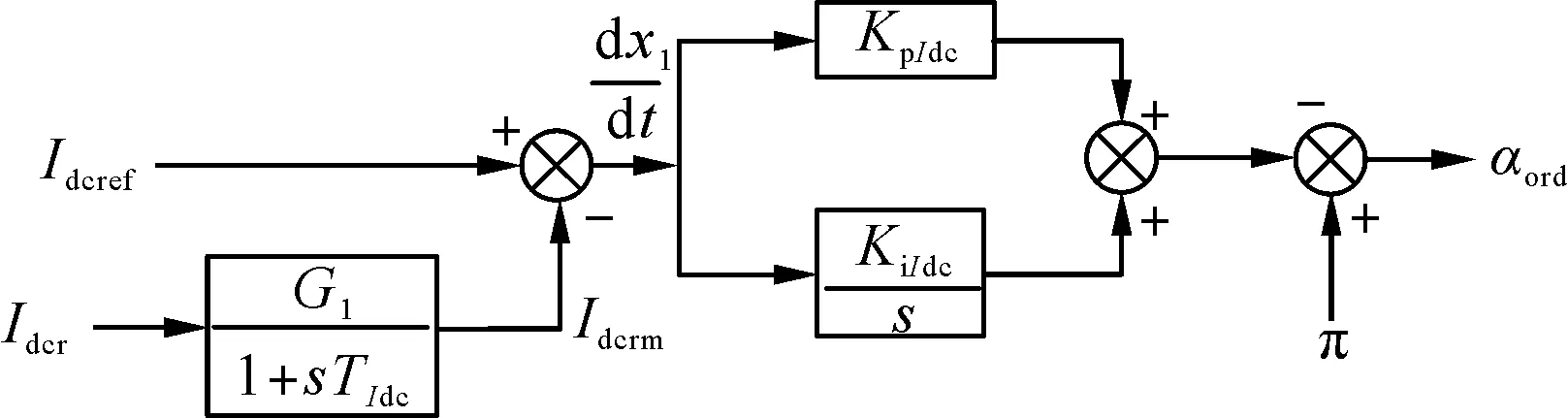
图2 定电流控制器原理框图
(4)
1.1.3 定电压控制器模型
定电压控制器的原理如图3所示,其状态空间模型如式(5)所示。
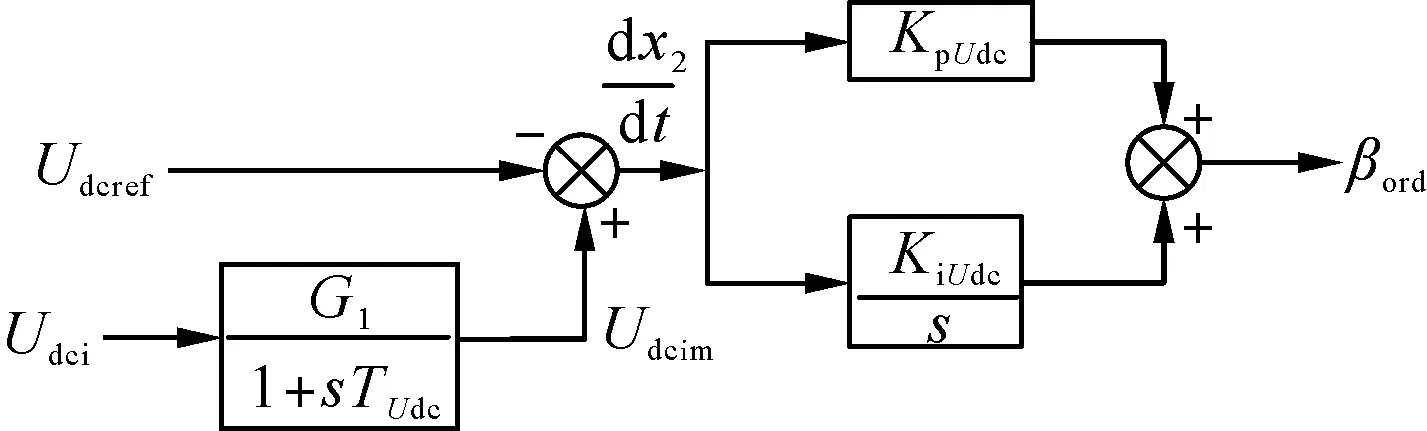
图3 定电压控制器原理框图
(5)
式中:Udcref为直流电压指令值;Udcim为直流电压的测量值;G2为一阶惯性环节的比例系数;TUdc为电压测量时间常数;x2为状态变量;βord为超前触发角指令值;βact为实际超前触发角;KpUdc和KiUdc分别为定电压控制器的比例系数和积分系数;xPLL2为逆变侧锁相环输出相角的初相位;θacti为逆变侧交流母线相电压的实际初相位。
1.1.4 锁相环模型
锁相环的主要作用是在等间隔触发控制下提供与交流电压同步的参考相位[23]。整流侧锁相环的原理可等效为图4所示,其状态空间模型为:
(6)

图4 锁相环原理框图
1.2 小干扰动态模型
双端LCC-HVDC输电系统的状态空间模型共包括39个一阶非线性微分方程。对这些方程进行线性化处理即可得到本文所研究系统的小干扰动态模型,其数学表达式为:

(7)
式中:x为状态变量;u为输入变量,u=[Idcref,Udcref]T;A为39×39的状态矩阵;B为39×2的输入矩阵。
系统经线性化后的输出方程为:
Δy=CΔx+DΔu
(8)
式中:输出变量y=[Idcrm,Udcim]T;C为2×39的输出矩阵;D为2×2的前馈矩阵。
1.3 小干扰动态模型验证
系统初始时运行于表1及表2所示参数下。
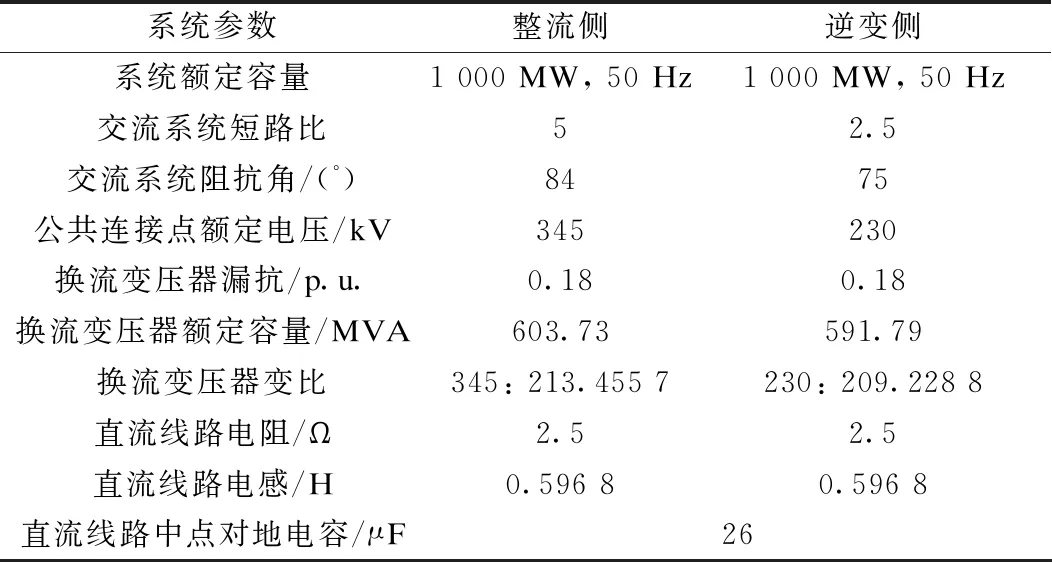
表1 LCC-HVDC系统参数

表2 LCC-HVDC控制器参数
令Idcref在t=5 s时由1 p.u.阶跃至0.95 p.u.,在t=6 s时由0.95 p.u.阶跃回1 p.u.,随后令Udcref在t=8 s时由1 p.u.阶跃至0.95 p.u.,在t=9 s时由0.95 p.u.阶跃回1 p.u.,在此过程中,Vpccr、Idcrm、Udcim和逆变侧锁相环输出频率fi随Idcref和Udcref变化的动态响应特性分别如图5所示。图中PSCAD曲线代表电磁暂态模型的仿真结果,S1曲线代表未计及锁相环输出相位与交流母线电压实际相位差异的小干扰动态模型的计算结果,S2曲线代表计及相位差异的小干扰模型计算结果。根据图5的对比结果可知,在控制器指令值发生阶跃变化后的动态过程中,S2的计算结果与PSCAD的动态响应更为吻合,验证了本文所建立小干扰动态模型的准确性。

图5 仿真结果对比
2 控制器参数优化
根据图5(b)及图5(c)可进一步测得在额定运行工况下Idcrm的阶跃响应超调量为23.2%,而Udcim的阶跃响应调节时间(±2%)为345 ms。为了避免试凑法的盲目性与不确定性,采用PSO算法在小干扰动态模型的基础上对LCC-HVDC的所有控制器参数同时进行优化,以期提升系统的动态响应性能。
2.1 PSO算法
文献[14]已对PSO算法的基本思想进行了介绍,在PSO算法中,粒子将根据式(9)不断在迭代中更新飞行速度与位置。
(9)
式中:vij、xij和pij分别为第i个粒子在第j维空间中的飞行速度、位置及历史最佳位置;w为惯性权重;r1与r2为两个相互独立的随机数,其范围为[0,1];c1为粒子自我学习因子;c2为粒子群体学习因子;pgj为整个粒子种群在第j维空间中的最佳位置;n为迭代次数;S为种群规模;D为空间维数。
本文PSO算法参数设置如下:种群规模S=100,最大迭代次数N=50,空间维数D=6;惯性权重w=1.2,自我学习因子c1=1.2,群体学习因子c2=1.2;粒子速度参数限制V=[-0.5,0.5]。此外,还需要对粒子的位置参数(即各控制器PI环节的参数)进行限制。根据前述所建立的小干扰动态模型,采用根轨迹法可以方便地获得各控制器参数致使系统小干扰失稳的临界值,本文将以根轨迹法的分析结果作为粒子的位置参数上限。
令定电流控制器比例系数KpIdc由1逐渐增大至6,同时保持其余控制器参数不变,得到S1与S2的根轨迹如图6所示。

图6 KpIdc变化时的根轨迹
由图6可知,随着KpIdc的逐渐增大,主导模式的特征根轨迹逐渐靠近并穿越虚轴,系统小干扰稳定性逐渐降低并最终失稳。然而S1与S2根轨迹所得到的KpIdc临界值是不同的,由S1得到的KpIdc临界值为3.81,由S2得到的KpIdc临界值为4.97。在PSCAD中令KpIdc在t=4 s时由1分别阶跃至4.5及5.7,得到Idcr的动态响应如图7所示。由图7可知,当KpIdc由1阶跃至4.5时,系统仍保持稳定,而当KpIdc从1跳变至5.7时,系统小干扰失稳。因此,由S2得到的KpIdc临界值更接近PSCAD的结果。
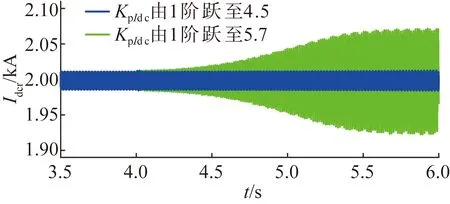
图7 KpIdc阶跃时Idcr的动态响应
令定电压控制器比例系数KpUdc由0.750 6分别逐渐增大至50和14.5,同时保持其余控制器参数不变,得到S1与S2的根轨迹如图8所示。
由图8(a)的S1根轨迹结果可知,当KpUdc增大至50时系统仍能保持小干扰稳定,而由图8(b)的S2根轨迹结果可知,当KpUdc增大至14.5时系统已出现位于复平面右半平面的特征根,系统失去小干扰稳定性。
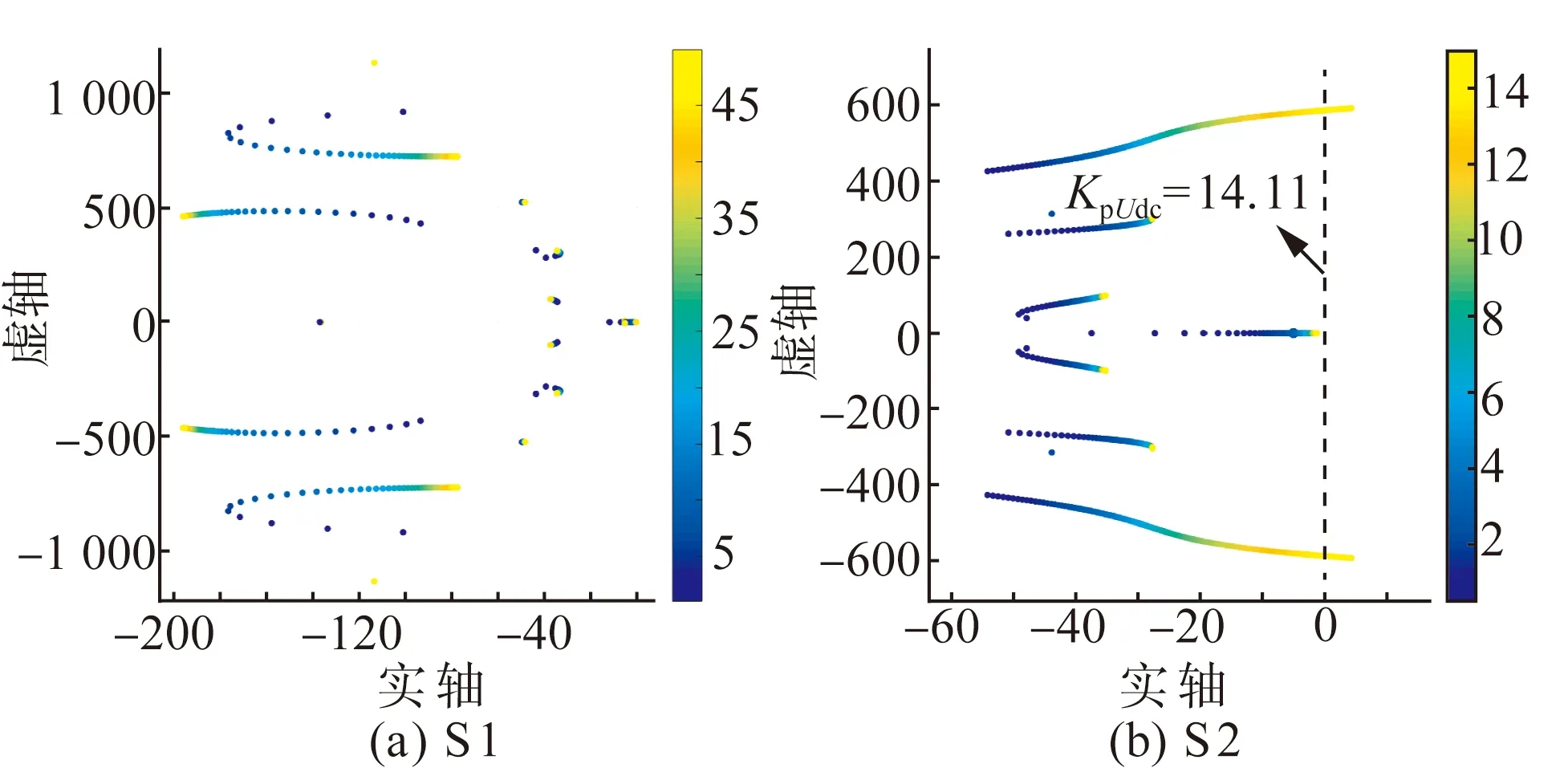
图8 KpUdc变化时的根轨迹
在PSCAD中令KpUdc在t=4 s时由0.750 6阶跃至14.5,得到Idcr的动态响应如图9所示。由图9可知,当KpUdc阶跃至14.5后,系统小干扰失稳,进一步验证S2的分析结果更为准确。
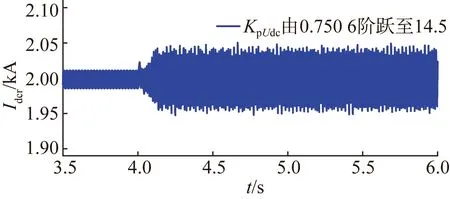
图9 KpUdc阶跃时Idcr的动态响应
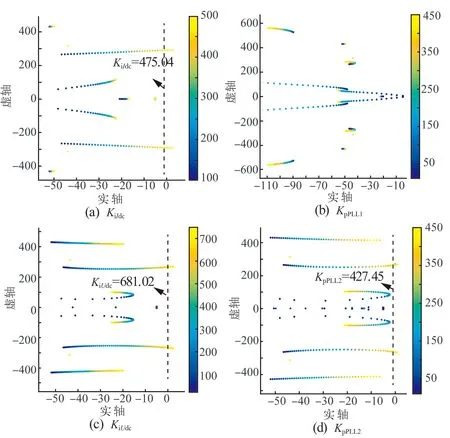
图10 其余控制器参数变化时S2的根轨迹
各控制器PI环节参数致使系统小干扰失稳的临界值如表3所示,这些临界值将作为PSO算法中的粒子位置参数上限,从而实现对控制器参数的算法优化。
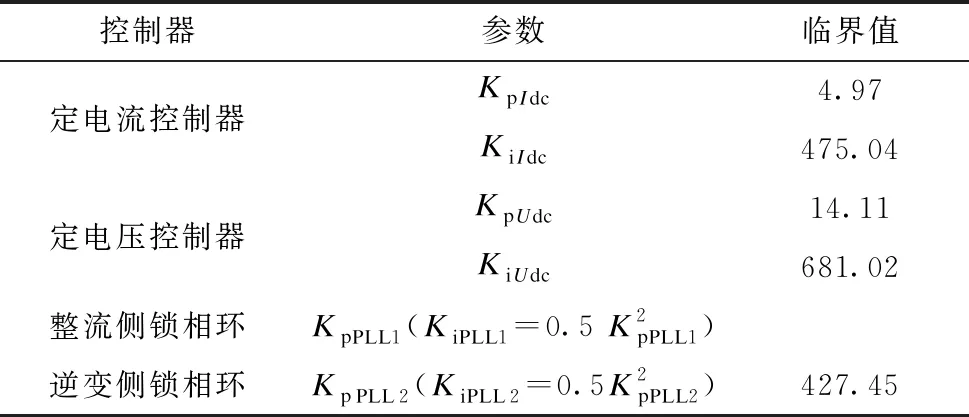
表3 各控制器参数的小干扰失稳临界值
2.2 目标函数
由于系统状态空间模型与传递函数间可以相互转换,根据式(7)—(8)可以得到线性化后的系统传递函数模型为:
(10)
式中:I为单位矩阵;Φ11(s)、Φ12(s)、Φ21(s)及Φ22(s)均为传递函数。
当考虑输入量ΔIdcref时,可将ΔUdcref设为0,反之亦然。则上述系统传递函数模型可以简化为:
(11)
ITAE指标具有较好的工程实用性和选择性[24],为同时兼顾直流电流与直流电压的动态响应性能,设算法目标函数为:
(12)
式中:TΦ11(s)为传递函数Φ11(s)单位阶跃响应的调节时间;TΦ22(s)为传递函数Φ22(s)单位阶跃响应的调节时间。
2.3 优化流程
根据上述内容可以得到本文所提出的控制器参数优化方法的流程如图11所示。

图11 参数优化流程
3 仿真测试
在MATLAB中按照图11所示参数优化流程,对所有控制器参数同时进行优化,得到优化前后控制器参数对比如表4所示。
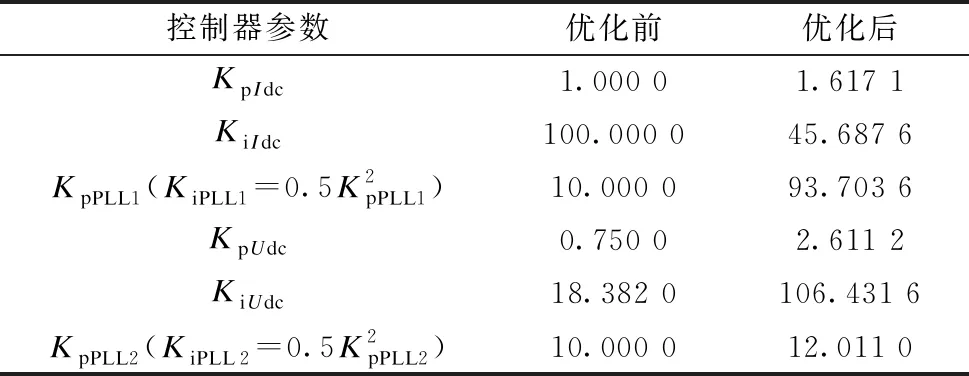
表4 优化前后控制器参数对比
将优化后的控制器参数带入PSCAD中,并令Idcref在t=5 s时由1 p.u.阶跃至0.95 p.u.,在t=6 s时由0.95 p.u.阶跃回1 p.u.,随后令Udcref在t=8 s时由1 p.u.阶跃至0.95 p.u.,在t=9 s时由0.95 p.u.阶跃回1 p.u.,得到优化前后Idcrm及Udcim的阶跃响应波形对比如图12所示,其动态响应性能对比如表5所示。
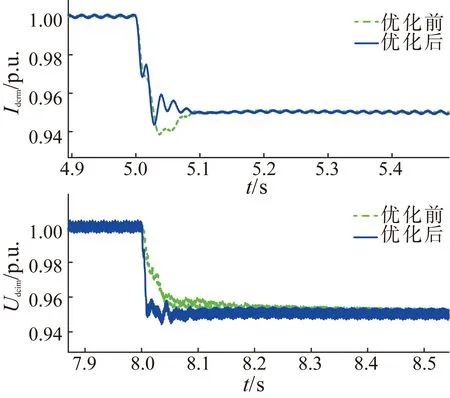
图12 优化前后Idcrm及Udcim阶跃响应波形对比
由表5数据可知,采用上述优化方法对控制器参数进行优化后,Idcrm阶跃响应的超调量下降了10.4%,上升时间与调节时间略有减小;而Udcim的阶跃响应尽管出现了4.8%的超调,但其上升时间与调节时间明显缩短。直流电流及直流电压的动态响应性能均有所改善,验证了本文控制器参数优化方法的有效性。

表5 优化前后动态响应性能对比
上述参数优化结果是在额定运行工况下进行的,为确定优化后的参数在非额定运行工况下的效果,现设定以下2个工况进行进一步仿真验证。
工况1:系统运行于80%功率状态下,对应定电流控制器指令值为0.8 p.u.。
工况2:系统运行于50%功率状态下,对应定电流控制器指令值为0.5 p.u.。
在工况1下,令Idcref在t=5 s时由0.8 p.u.阶跃至0.85 p.u.,在t=6 s时由0.85 p.u.阶跃回0.8 p.u.,随后令Udcref在t=8 s时由1 p.u.阶跃至0.95 p.u.,在t=9 s时由0.95 p.u.阶跃回1 p.u.,得到优化前后PSCAD中Idcrm及Udcim的阶跃响应波形对比如图13所示。
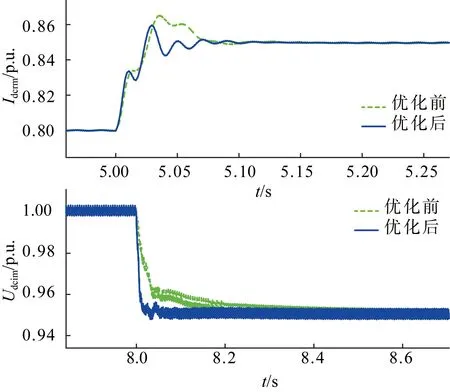
图13 工况1优化前后Idcrm及Udcim阶跃响应波形对比
Idcrm及Udcim的动态响应性能对比如表6所示。

表6 工况1优化前后动态响应性能对比
在工况2下,令Idcref在t=5 s时由0.5 p.u.阶跃至0.55 p.u.,在t=6 s时由0.55 p.u.阶跃回0.5 p.u.,随后令Udcref在t=8 s时由1 p.u.阶跃至0.95 p.u.,在t=9 s时由0.95 p.u.阶跃回1 p.u.,得到优化前后PSCAD中Idcrm及Udcim的阶跃响应波形对比如图14所示,其动态响应性能对比如表7所示。
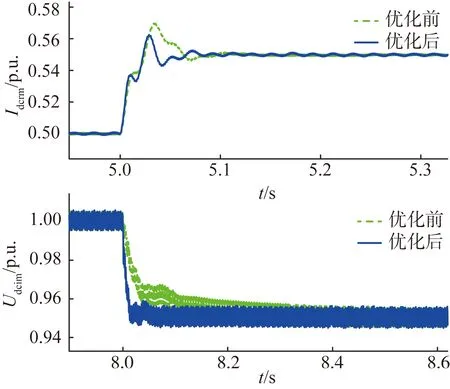
图14 工况2优化前后Idcrm及Udcim阶跃响应波形对比
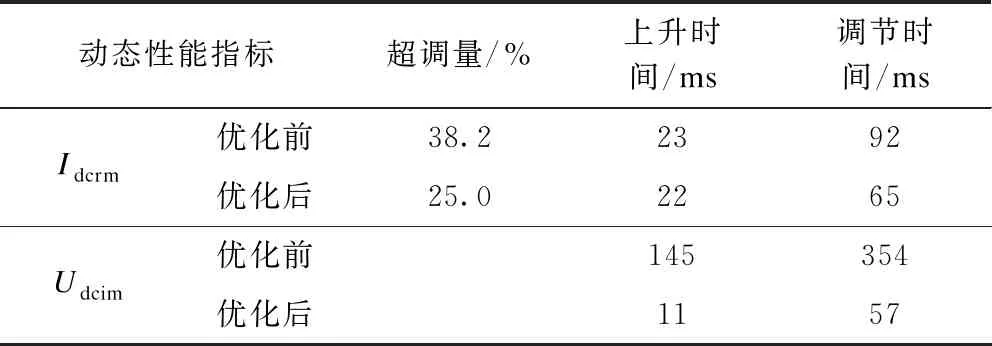
表7 工况2优化前后动态响应性能对比
根据表6—7数据可知,在低功率运行情况下,优化后的控制器参数仍能保持直流电流及直流电压阶跃响应的超调量小于30%,上升时间小于30 ms,具有良好的鲁棒性。
4 结论
本文建立了LCC-HVDC输电系统的小干扰动态模型,并基于该小干扰动态模型与转化的传递函数模型,应用PSO算法对各控制器参数同时进行了优化。通过对优化前后的控制器参数进行仿真对比,得到如下结论。
1)小干扰动态模型的计算结果能够较为准确地反映电磁暂态模型的仿真结果,由小干扰动态模型转化而来的传递函数模型的精度较已有文献中的传递函数模型更高;基于本文所建立的模型进行控制器参数的整定优化,能够避免实际仿真模型多次运行耗时较长的缺点。
2)仿真验证的结果表明本文所提出的参数优化方法能够对各控制器参数同时进行优化,进而同时改善直流电流与直流电压的动态响应性能。此外,在系统低功率运行时优化后的参数仍能使系统满足动态响应性能要求,具有良好的鲁棒性。
本文所研究的系统其逆变侧采用的是定电压控制策略,未考虑定关断角控制策略。对于逆变侧采用定关断角控制策略时的控制器参数整定有待进一步研究。此外,将本文所提出的方法应用于实际工程模型的工作也有待进一步展开。
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
舰船科学技术(2022年11期)2022-07-15
宁夏电力(2022年1期)2022-04-29
南方电网技术(2021年8期)2021-09-24
汽车维修与保养(2021年11期)2021-03-11
电动工具(2020年4期)2020-08-20
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
舰船电子工程(2019年9期)2019-09-27
电子制作(2019年15期)2019-08-27
