基于深度学习的滚动轴承故障诊断方法
2021-06-18 03:37陈志刚杨志达
设备管理与维修 2021年7期
陈志刚,高 鹤,刘 菲,杨志达
(北京航天拓扑高科技有限责任公司,北京 100176)
0 引言
滚动轴承是机械设备中常见的组件,从简单的电风扇到复杂的机床上都有滚动轴承的应用。事实上,超过50%的机械缺陷与轴承故障有关,从而导致机器停产、停机、甚至造成人员的伤亡[1]。因此,滚动轴承故障诊断是机械故障诊断的一个重要方面,也是近些年来的研究热点。近些年来,随着学者们的不断深入研究提出了各种故障诊断的方法。传统的研究方法有:BP 神经网络[3]、概率神经网络(Probabilistic Neural Network,PNN)[4]、小波分析[5]、EMD[6]、集合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)[7]、奇异值分解(Singular value decomposition,SVD)[8]等得到了广泛的应用。目前基于机器学习的故障诊断方法主要有,如Logistic 回归[9]、支持向量机(Support Vector Machine,SVM)[10]以及人工神经网络(Artificial Neural Network,ANN)[11]、模糊推断[12]。
人工智能的蓬勃发展,深度学习在图像识别、语音识别等领域得到广泛运用。反应轴承故障的振动信号在本质上与语音相同,都属于对声音信号进行分类,提出一种基于深度学习的滚动轴承故障诊断,首先使用一维卷积神经网络层(One Dimension Convolution Neural Networks,1D-CNN)提取特征,随后使用门控循环单元网络层(Gate Recurrent Unit,GRU)捕捉这些特征图的时间动态,故障的分类取决于通过全连接层的最终GRU 单元的输出。首先利用数据集通过对比实验确定GRU 和CNN 的网络结构和相关参数,从而确定整个目标域的网络架构及参数。
1 基础理论
1.1 一维卷积网络
卷积神经网络(Convolution Neural Networks,CNN)是共享权重、局部连接的多层神经网络。卷积神经网络的构成主要包含隐含层、输出层及输入层。输入层主要从图像资源中获取图像的像素矩阵资源,隐含层主要用于接收输入层的输出并完成对图像特征的提取,输出层主要将隐含层的结果进行输出。
卷积神经网络根据输入类型不同,可以将其分为一维和二维卷积神经网络。其中,二维卷积神经网络主要用于图像和视频二维信号;一维卷积神经网络主要运用于自然语言处理等领域,适用于处理时间序列数据这种一维数据。采用一维卷积神经网络对数据集(长序列)进行特征提取。
1.2 门控循环网络
GRU 由经典的循环神经网络——长短期记忆网络(Long Short—Term Memory,LSTM)优化所得,具有更加简单的结构、更少的参数、更好的收敛性。GRU 神经网络的整体结构主要包括:更新门和重复门。其中更新门主要用于控制前一时刻的状态信息被带入到当前状态的程度,更新门的值越大说明前一时刻的状态信息带入越多;重置门用于控制忽略前一时刻的状态信息的程度,重置门的值越小说明忽略得越多[13]。
2 滚动轴承故障诊断模型实验分析
2.1 数据集描述
采用在凯斯西储大学的公开实验数据集作为实验数据进行训练与测试。将每种工况的数据分成4 种状态:正常(N)、内圈故障(IF)、外圈故障(OF)和滚珠故障(BF)。其中将故障部分划分为3 种尺寸:小(0.18 mm)、中(0.36 mm)和大(0.54 mm),所以根据不同状态和故障尺寸有10 种情况,如表1 所示。

表1 故障类型分类
由于数据集中提供的原始振动信号是一条很长的一维数据,每种数据样本数比较少。为获得尽可能多的样本,采用滑动窗口进行重叠采样,为获得更好的训练效果,将获得的样本随机打乱。每种故障类型采样10 000 个样本,每个样本中2048 个数据点,并且将数据集中的80%作为训练集用于训练CNN—GRU网络,剩下的20%作为测试集用于测试系统的性能。
2.2 网络结构参数确定
通过比较不同CNN 和GRU 网络的层数组合,选择出最佳的深度学习模型,实验对比结果见表2 和表3。
表2 为不同层数CNN 与GRU 单元组合时,在测试集中的类间平均准确率,由表2 可见当CNN 层数大于2 层时,网络诊断准确率较高,均高于99%,这是由于随着网络层数的加深,深层的CNN 层能够提取到较为抽象的特征,更有助于随后连接的全连接层进行分类。表3 为对1000 个测试样本进行分类所需时间,由表3 可见当GRU 层数较少时,分类所需的时间较短。按照分类时间短,分类准确率高这2 个条件对网络层数进行选取,最后选出3 层CNN+1 层GRU 以及3 层CNN+2 层GRU 这2 种网络结构,将这2 种结构进行对比发现,将GRU 的层数从1 层提升至2 层时,类间平均准确率上升了0.1%,但所需时间却成倍上涨,因此,综合分析各种元素,选取3 层CNN+1 层GRU 作为迁移前的网络结构,最终整个模型的全部参数如表4 所示。
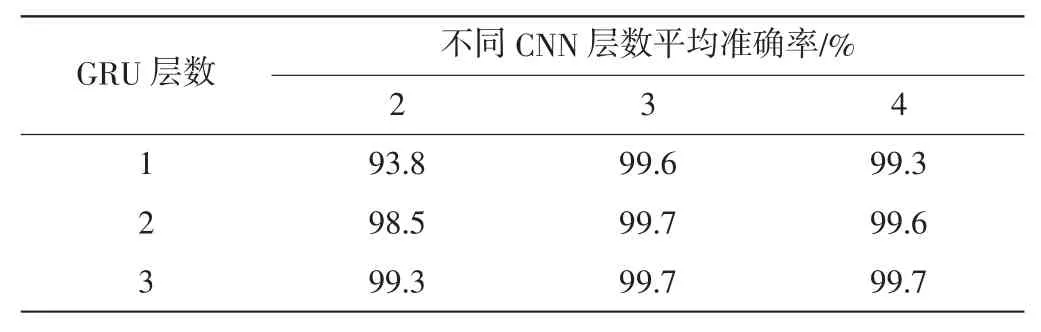
表2 测试集类间平均准确率

表3 测试集预测速度

表4 故障诊断网络参数
2.3 实验结果
使用上述数据集,对比所确立的模型以及训练方式对网络进行训练,最终所得各类诊断准确率见表5,混淆矩阵如图1 所示,混淆矩阵标识说明见表6。

表6 混淆矩阵标识说明

图1 故障诊断混淆矩阵

表5 故障诊断实验结果
由上述图表可以看出,所提出的基于深度学习的故障诊断网络,在美国凯斯西储大学数据集中所进行的实验,除在外圈故障小尺寸这一类中诊断效果相对较差为96%外,在各类之中诊断预测效果较为优秀,均能达到100%,说明所设计诊断方法具有较高的使用价值。
3 结束语
提出了一种基于深度学习的智能故障诊断方法,在CNN 设计方法的基础上,根据训练要求设计了9 种CNN 网络结构。通过实验数据集测试,确定了一种最优的CNN 网络模型。所采用的基于一维卷积和门控循环单元的滚动轴承故障诊断方法整体上能够达到99.6%的识别准确率,体现了网络优异的诊断能力,证明了所提出方法的可行性,为采用CNN 和GRU 进行故障诊断提供了新的思路,具有较好的技术应用前景。
猜你喜欢
一重技术(2021年5期)2022-01-18
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
西安邮电大学学报(2020年1期)2020-12-17
计算机系统应用(2019年9期)2019-09-24
中国交通信息化(2018年5期)2018-08-21
电子制作(2018年10期)2018-08-04
北京航空航天大学学报(2016年6期)2016-11-16
军事运筹与系统工程(2016年4期)2016-07-10