
三维激光扫描测量技术在规划核实测量中的应用探索
2021-06-18 10:33杨新成
现代矿业 2021年4期
杨新成
(安庆市勘察测绘院)
三维激光扫描测量技术是20世纪90年代出现的一项高新技术,他通过主动发射高速激光对目标物体进行扫描,通过收集回波完成测量过程[1]。地面三维激光扫描测量技术是基于地面固定站,通过发射激光获取被测物体表面三维坐标、颜色、反色率和对光的吸收特性等多种信息,是一种全新的非接触式主动测量技术。传统的规划核实测量是基于全站仪采集建筑物主要特征点的三维坐标,然后外业人工丈量建筑物有关细部尺寸,形成建筑物竣工验收规划核实测量成果数据,并将其在1∶500竣工图上进行表达。传统方法测量效率低,制图工作量大,难以满足快节奏的工程需求[2];地面三维激光扫描测量技术具有扫描精度快、实时性强、精度高、主动性强等优点,能大幅提升作业效率,是继GPS测量技术之后的又一次测绘领域技术革命,目前在工程建设、测量等相关领域有着广泛的应用前景。已经有测绘生产单位就三维激光扫描技术在工程建设或竣工阶段中的测绘工作进行了探索性应用[3]。本研究结合工程案例,分析地面三维激光扫描测量技术在规划核实测量中的应用效果。
1 工程概况及技术指标
1.1 工程概况
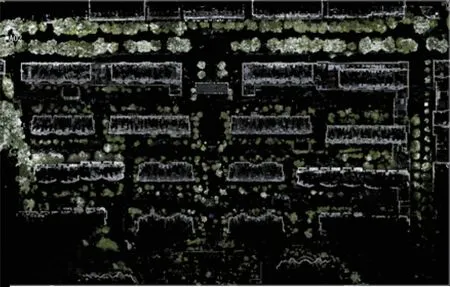
某房产开发项目工程已竣工,进入规划验收环节,需要进行规划核实测量,获取建筑物的首层室内地坪高、建筑物顶部高程以及建筑物的位置、长宽、地形地貌等数据,最终提交1∶500竣工图。竣工图范围包括10栋建筑物及周边道路等,具体如图1所示(图中①~⑩为待扫描建筑物)。

1.2 技术指标
根据《城市测量规范》要求[4],建筑物竣工验收规划核实测量的主要技术指标如下。
(1)最终竣工图的主要地物点(涉及规划要素的地物点)相对邻近图根点的点位中误差不应大于0.05 m,次要地物点相对邻近图根点的点位中误差不应大于0.07 m,地物点间距中误差不应大于0.05 m,困难地区地物点相对邻近图根点的点位中误差和地物点间距中误差不应大于0.1 m。
(2)间距>50 m的规划要素点、地物点间距误差限差不应大于0.1 m,间距≤50 m的规划要素点、地物点间距误差ΔD限差不应大于式(1)的计算结果,困难地区间距误差限差为2倍中误差。

式中,D为边长,D≤50 m。
(3)建筑物顶部高程误差不应大于0.10 m。
(4)竣工建筑相关的高程测量精度:注记点(建筑物首层的室内外地坪高程)相对于邻近图根点的高程中误差不应大于0.03 m;其他主要地物高程点相对邻近图根点的高程中误差不应大于0.04 m。
2 作业流程
接受委托任务后,按照图2工作流程进行作业组织和实施。

3 控制测量
为保证工程精度,根据技术规程要求[5],在测区周边和小区内部布设了33个控制点,平面按照III级导线的精度、高程按照图根三角高程的精度进行观测。经过导线平差,成果满足规范要求。控制点位置见图3。
4 地面三维激光扫描
采用徕卡RTC360型三维激光扫描仪,运用其独有的VIS视觉追踪技术实现自由架站扫描,无需整平,放稳即测,2个多小时可完成扫描60个站点,完成需要测量的10栋建筑物及周边道路等地形、地貌的数据采集。在扫描仪可视范围内的控制点上架设标靶,为后期坐标系统转换提供条件。三维激光扫描仪架站点位布置情况见图4。
外业架站扫描结束后,在图形工作站上下载点云,并进行点云拼接、数据采集等数据处理。

5 数据处理及精度分析
数据处理主要包括4个部分:点云下载、点云拼接、坐标转换、点云数据采集。
5.1 点云下载及拼接。
点云下载和拼接均使用Leica Cyclone软件,点云采用视图拼接的方法,先进行自动拼接,然后根据拼接报告,选择拼接误差较大的点云再进行拼接优化,最终点云的拼接误差(mP)平均值为0.02 m。
5.2 坐标转换
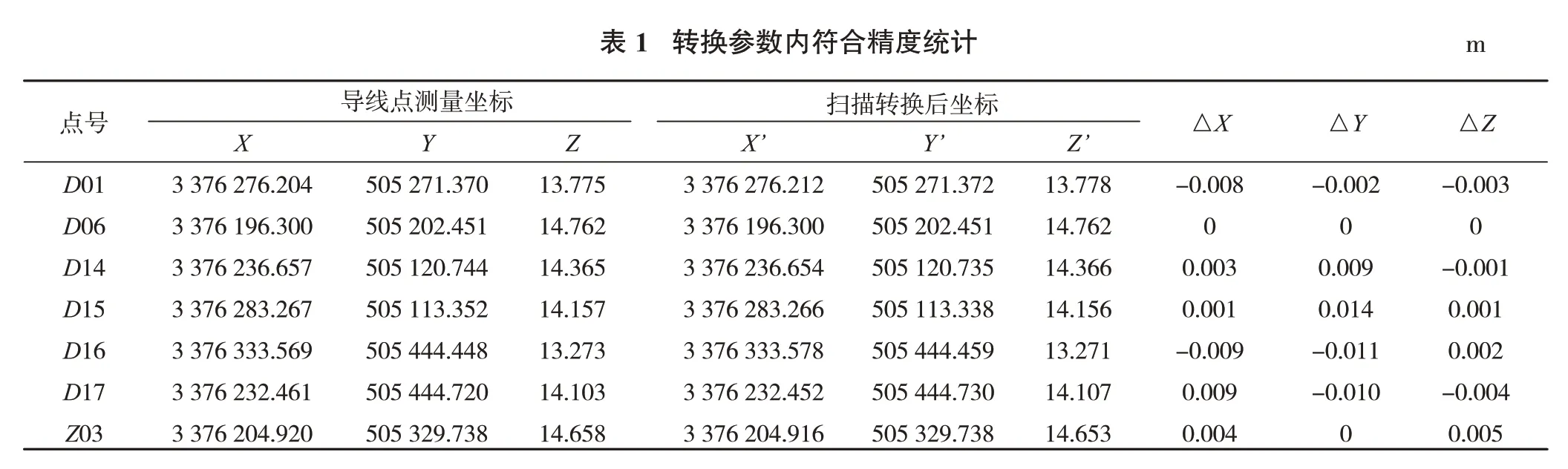
因采取的是自由架站的方式进行扫描,最终获取的点云数据属于自由坐标系下的数据,需要通过提取扫描的控制点点云坐标与同名点导线测量的坐标进行匹配转换,得出具有CGCS2000坐标系和1985国家高程基准的点云数据。本项目共扫描到了20个导线控制点,采用七参数法,经过优化组合,最终选择7个导线控制点进行坐标转换参数计算,7个点位见表1。
经过计算分析,由表1可得转换参数的平面内符合精度为0.011 m,高程内符合精度为0.003 m;同时对其他13个未参与转换点也进行精度评定,由表2可得转换参数的平面外符合精度(mW)为0.012 m,高程外符合精度为0.004 m。
5.3 点云数据采集
将坐标转换后的点云进行数据格式转换,在CAD高版本中进行点云数据采集,提取规划核实数据,绘制1∶500竣工图,见图5。经统计点云的厚度最大为0.01 m,所以点云采集的精度(mC)按0.01 m进行精度统计。
5.4 点云精度统计
根据前述数据处理阶段各个环节的精度情况,进行误差统计和分析,最终竣工图的主要精度包括点云拼接精度、坐标转换精度、点云采集精度3部分,根据式(2)计算点云成果1∶500竣工图的平面最终精度m为0.025 m。

?

?

6 精度检测
数据采集完成并经过外业调绘和补测后,对最终1∶500竣工图成果中的主要地物进行绝对精度、相对精度、高程注记点精度、建筑物顶部高程精度等进行外业检查。检查使用徕卡TS02(5")型全站仪,在导线点上架站,利用无棱镜采集地物点的坐标和内部道路上的高程,以及建筑物顶部的高程值。根据全站仪采集的数据和外业丈量的值,与点云成果线划图中对应的值进行逐项比较。
6.1 点位精度
随机选取全站仪采集的30个点位坐标与点云成果1∶500竣工图中对应的点位坐标进行比较,数据见表3。
由表3统计分析可得,利用三维激光扫描仪取得的地物点位置中误差为0.015 m,满足主要地物点中误差不应大于0.05 m、次要地物点中误差不应大于0.07 m的要求。
6.2 间距中误差
将外业丈量的20个建筑物边长与1∶500竣工图对应的建筑物边长进行比较,数据计算见表4。
由表4统计分析可得,利用三维激光扫描仪取得的地物点间距中误差为0.008 m,满足地物点间距中误差不应大于0.05 m的要求。
6.3 高程测量精度
1∶500竣工图中的高程是直接根据点云成果在相应的位置注记,利用全站仪随机测量了20个高程值,与点云的相应高程进行比较,结果见表5。
由表5统计分析可得,利用三维激光扫描仪取得的注记点高程中误差为0.01 m,满足主要地物高程点中误差不应大于0.04 m的要求。因现场环境影响,三维激光扫描作业环节未对建筑物首层室内地坪进行扫描,但通过表5分析结果可以推断,通过三维激光扫描技术取得的首层室内地坪高程中误差≤0.03 m。
6.4 建筑物顶部高程精度
根据点云成果在建筑物女儿墙顶位置直接注记建筑物顶部高程,利用全站仪测量建筑物相应女儿墙位置的高程值,二者进行比较,见表6。
由表6统计分析可得,利用三维激光扫描仪取得的建筑物顶部高程中误差为0.02 m,满足建筑物顶部高程误差不应大于0.10 m的要求。
7 工作效率对比
工程结束后,对三维激光扫描技术和常规的全站仪技术进行效率评估和对比,结果见表7。
表中全站仪技术的工作效率是根据其他工程进行推算得到,地面三维激光扫描技术属于初次使用,操作还不够熟练。表中的结果仅为参考,但地面三维激光扫描技术效率高是行业公认的事实,并且减少了外业劳动强度,提高了生产力。

?

?
通过点云精度分析可以得知,基于地面三维激光扫描技术取得的点云成果,影响其精度主要是点云拼接精度、坐标转换精度以及点云数据采集精度,本案例采用视图拼接模式,如果采用标靶进行点云数据拼接,可以提高三维激光扫描技术的成果精度[6]。

?

注:表中时间已换算为单人所用时间。
8 结语
规划核实测量中利用地面三维激光扫描技术可以主动地获取建筑物表面的三维点云数据,通过点云数据处理可以为规划监督管理部门提供高质量的测量成果,相比于传统测绘的测量方式,主要优点有获取数据的采用频率高、通过非接触测量降低安全风险、效率高、成果精度可靠。
猜你喜欢
当代陕西(2020年23期)2021-01-07
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
工程与建设(2019年3期)2019-10-10
中国交通信息化(2019年4期)2019-07-13
小学生导刊(低年级)(2016年5期)2016-05-27
电测与仪表(2016年9期)2016-04-12
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
